 研究基于多功能離子纖維傳感器系統的物體識別和抓取的人工觸覺感知
研究基于多功能離子纖維傳感器系統的物體識別和抓取的人工觸覺感知
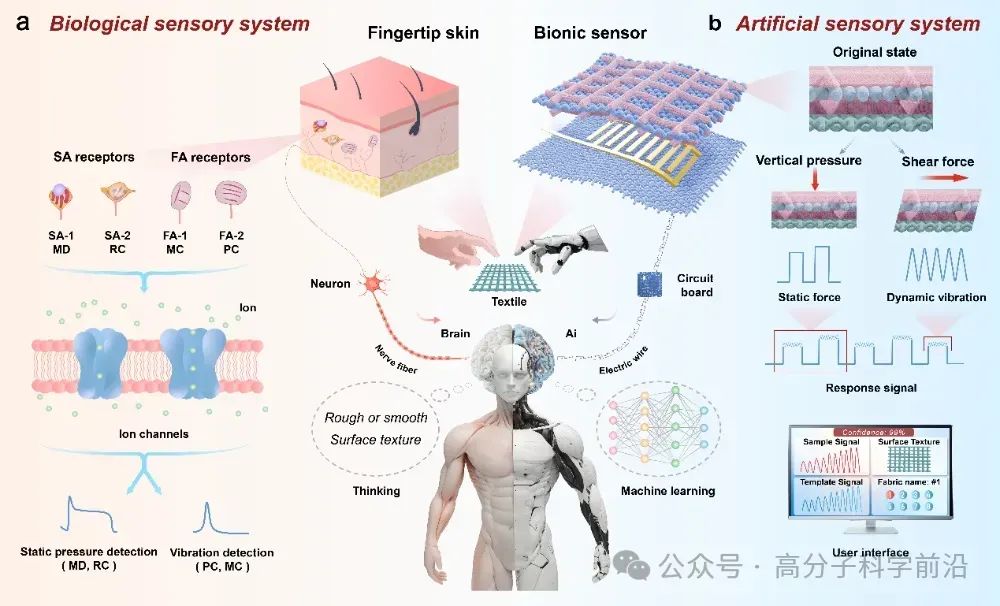
人類觸覺感知是一種復雜的感覺系統,它依賴于皮膚中的感覺受體來接收外部刺激,轉換信號,隨后通過神經系統分析和識別這些信號。傳遞到大腦皮層的觸覺信息在特定區域經歷復雜的處理。例如,體感皮層感知身體位置和運動的變化,而頂葉皮層負責識別物體的形狀和紋理。人類的觸覺感知超越了單純的生理反應;它允許個人通過觸摸辨別物體的形狀、紋理和表面特征,促進與環境的互動和決策過程。柔性可穿戴技術的進步促使人們試圖通過壓力傳感器模擬人體皮膚的觸感。利用壓阻、壓電電容、壓電和其他機制的柔性壓力傳感器具有高靈敏度和快速響應性,已被廣泛開發并有效應用于仿生機器人、遠程醫療、電子皮膚等各個領域。然而,僅基于單一機制使用壓力傳感器實現大腦皮層材料識別的全面模擬仍然具有挑戰性。基于單個壓阻或壓電電容的壓力傳感器通常只采集與壓力或力學相關的單個信號,因此難以同時提供材料識別所需的多維信息。由于自然界中各種材料的表面電荷特性不同,摩擦電納米發電機(TENG)可以通過接觸具有不同電子增益或損失能力的材料來感應不同量的正負電荷,并在表面之間產生電勢。基于不同的摩擦電輸出信號,可以有效地識別所接觸的材料類型。相比之下,雖然TENG可以實現材料的初始區分,但它們僅用于動態壓力,在抓取物體時無法捕捉到有關機械刺激的準確信息。因此,需要同時集成多種傳感機制的多模態觸覺傳感器,以多種方式實現對材料特性和機械刺激信息的捕獲。李等設計并開發了一種由軟硬件協同驅動的基于全皮仿生e-skin的智能材料認知系統,該系統可以通過單次接觸實現不同材料及其位置的同時認知,有望為智能機器人和假肢提供新的觸覺認知能力,從而促進智能化進程的發展。
提高TENG的輸出性能以及摩擦電層與識別對象之間的電負性差異在研究中具有實際意義。引入微結構來增加接觸表面積,從而產生總電荷是最直接的方法。通過靜電紡絲制備的微納纖維具有較大的比表面積和豐富的多孔結構,不僅易于引入微觀結構,而且由于其薄而輕的質量和與皮膚的柔軟貼合,具有優異的穿著舒適性。因此,它們是制備可穿戴TENG的有前景的候選者。然而,纖維結構表現出相對較低的功率輸出,主要歸因于其微米級的厚度。因此,除了結構調制外,摩擦電材料的表面功能化,如離子摻雜、自由基注入和等離子體處理,也會顯著影響電荷的產生。目前的大多數報告主要集中在修改負摩擦電層上,這在識別高電負性材料方面的改進有限。實際上,TENG的性能也與正摩擦電層接觸表面上的電荷密度成正比。通過摻雜供電子離子液體對正摩擦電層材料進行改性是一種有前景的嘗試。然而,雖然離子注入可以顯著提高TENG的輸出,但其長期穩定性仍需考慮。
對于離子電容式壓力傳感器,離子液體摻雜同時賦予復合纖維薄膜優異的離子傳輸性能,可以通過在外部壓力刺激下與電極形成陰離子和陽離子的雙電層(EDL)來實現觸覺傳感。由于EDL界面正負電荷之間的原子尺度距離(≈1 nm),離子電子器件可以獲得μF cm?2范圍內的超高面積電容。這解決了傳統電容式傳感器靈敏度低的問題,顯著提高了可穿戴觸覺傳感器的靈敏度。EDL電容主要受界面接觸面積的影響。因此,具有多層光纖網絡結構的離子觸覺傳感器可以在寬壓力范圍內實現增強的傳感器靈敏度。
本文亮點
1. 本工作用1-乙基-3-甲基咪唑雙氰胺([EMIM][DCA])改性的多功能離子纖維膜可以實現高性能的離子電容傳感和摩擦發電。[EMIM][DCA]通過獨特的氫鍵高度摻雜到熱塑性聚氨酯中,從而制成具有超高靈敏度(184.3 kPa?1)和超低檢測限(1.9 Pa)的電容式觸覺傳感器。
2. 雙氰胺離子將供電子基團引入正摩擦電層,使摩擦電納米發電機(TENG)的輸出性能提高了2.47倍,具有超過20000次循環的優異穩定性。
3. 通過整合這些出色的觸覺傳感和摩擦電特性,開發了一種智能手套,可以捕捉微妙的抓握動作并識別不同的材料。擴展TENG陣列并將機器學習集成到自動分揀夾具中,可以進一步增強識別對象的多樣性,并將材料識別準確率提高到99.17%。
圖文解析
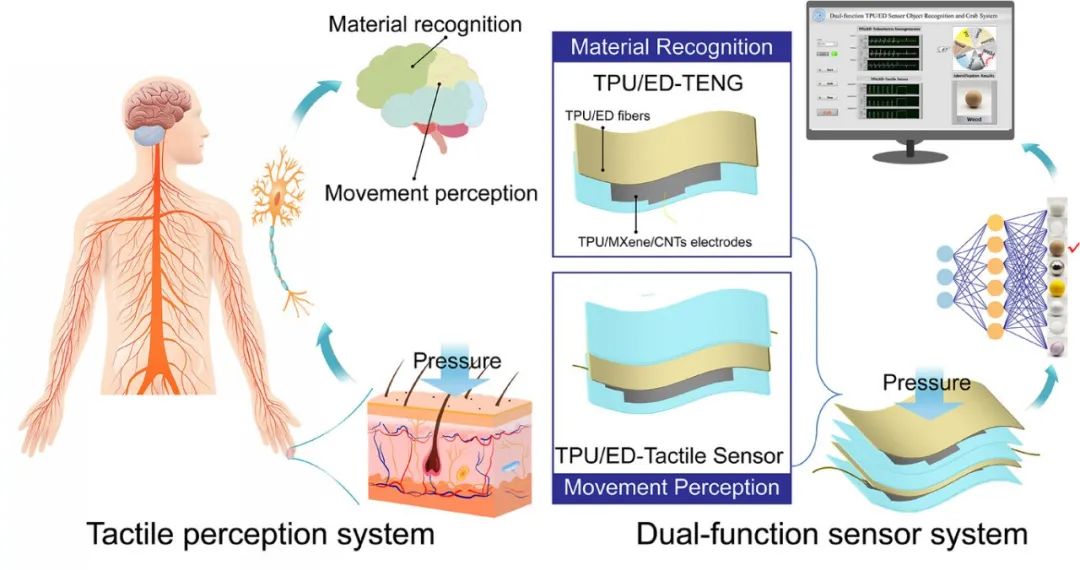
圖1. 基于雙功能離子纖維的傳感器模擬人類觸覺感知系統用于物體識別和運動捕捉的示意圖。
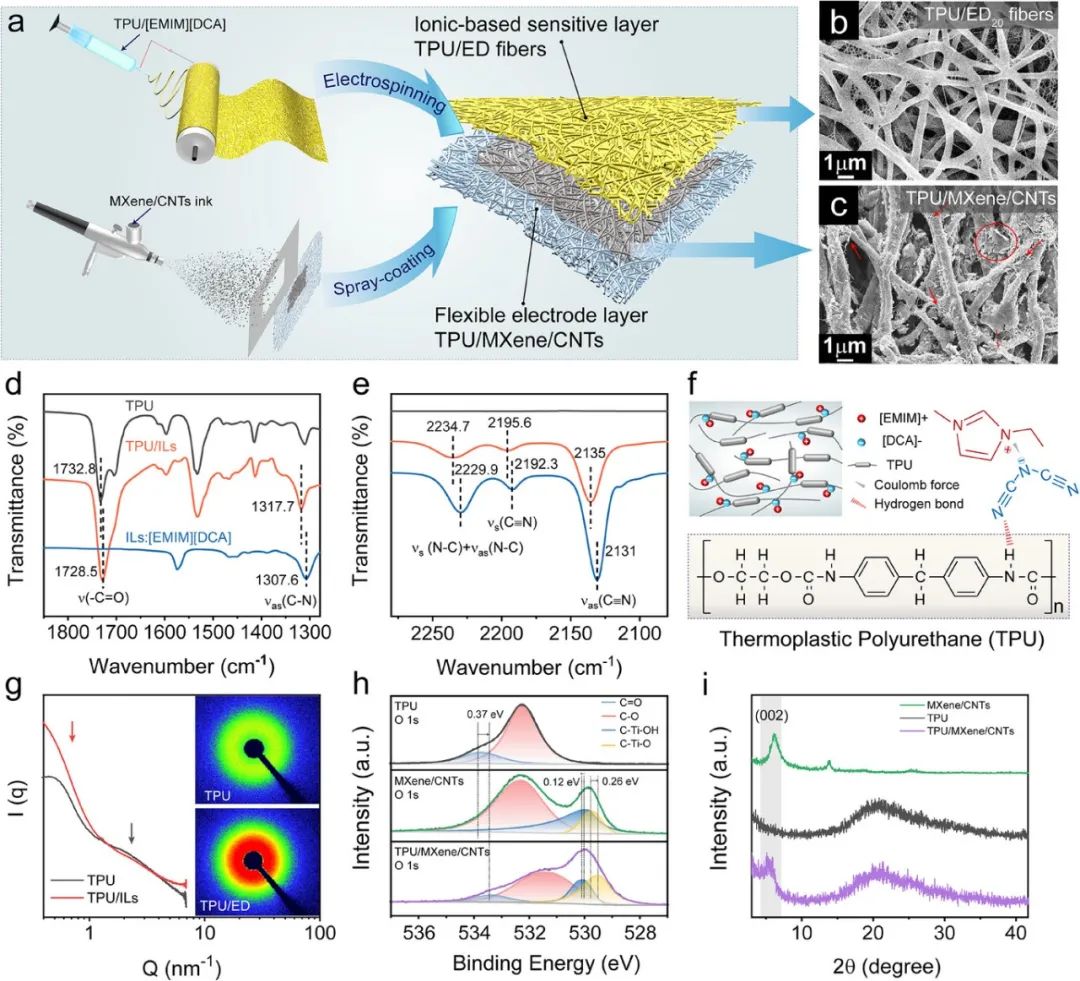
圖2. 雙功能傳感器的合成原理圖和組成表征。a) 敏感層TPU/ED纖維和柔性電極TPU/MXene/CNTs的制備示意圖。b) 摻雜20 wt%[EMIM][DCA]的TPU/ED纖維的SEM圖像。c) TPU/MXene/CNTs電極的SEM圖像。TPU、TPU/ED和[EMIM][DCA]d)在1250–1850 cm-1和e)在2080–2280 cm-1的傅里葉變換紅外光譜揭示了代表性峰ν(C)的紅移═O) 以及[EMIM][DCA]。f) TPU和[EMIM][DCA]分子結構中氫鍵形成的示意圖。g) TPU、TPU/ED纖維的SAXS圖案顯示,隨著[EMIM][DCA]的添加,聚合物鏈距離增加。h) TPU、MXene/CNT和TPU/MXene/CNTs的O 1s XPS掃描光譜。i) TPU、MXene/CNT和TPU/MXene/CNTs的XRD。
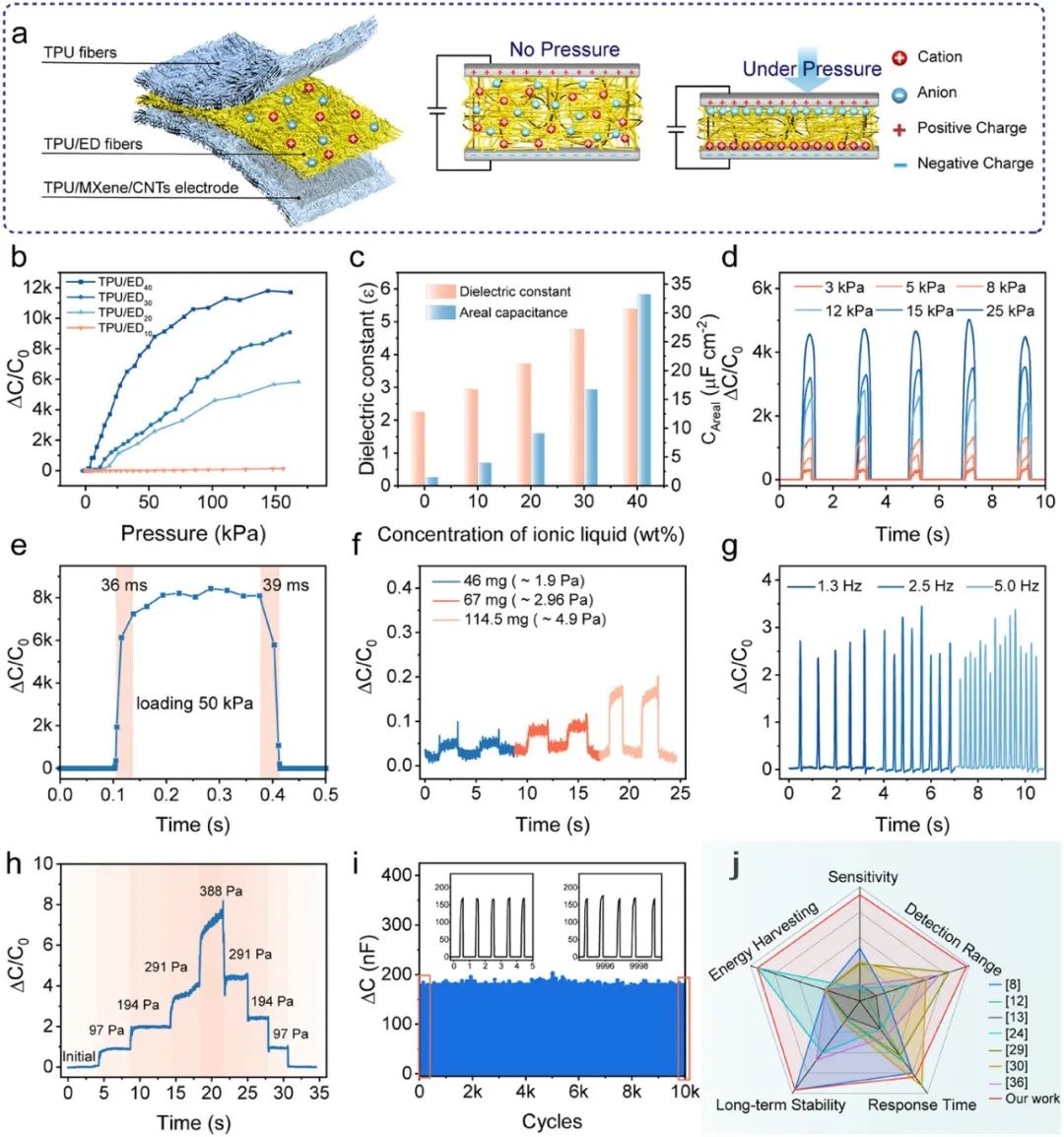
圖3. 基于TPU/ED纖維的觸覺傳感器(TPU/ED傳感器)的傳感機制和傳感性能。a) TPU/ED傳感器結構和離子電容傳感機制的示意圖。b) 基于不同[EMIM][DCA]摻雜濃度的傳感器的相對電容隨壓力曲線而變化。c) 0-40 wt.%纖維膜的相對介電常數和0-40 wt.%IL摻雜傳感器的面電容。d) 摻雜40 wt%離子液體的優化TPU/ED傳感器(TPU/ED40傳感器)在3-25 kPa的周期性加載和卸載時的相對電容變化。e) TPU/ED40傳感器在裝載和卸載過程中的響應時間和恢復時間。f) 感應信號對低至1.9 Pa(≈46 mg泡沫)的微小壓力做出反應。g) 傳感器對以不同頻率按壓洗耳球產生的微弱氣流的電容響應。h) 按順序放置/取1克重物時檢測微小的壓力變化。(i) 在10 kPa的加載和卸載過程中的循環傳感性能。在10000次循環后,沒有監測到明顯的性能下降。j) 基于TPU/ED的觸覺傳感器與其他報道的離子電容傳感器在傳感性能矩陣方面的雷達圖比較。
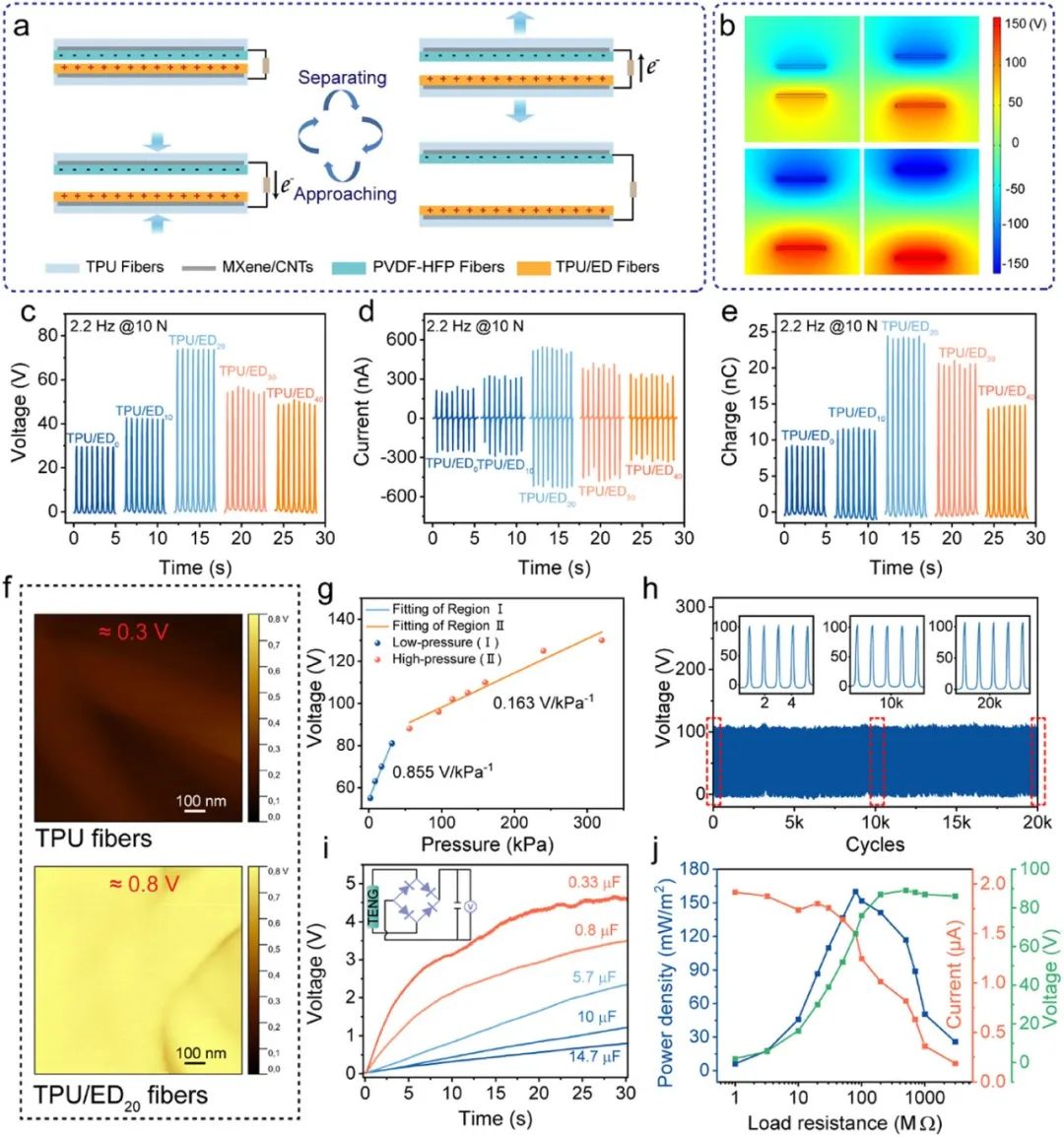
圖4. 基于TPU/ED纖維(TPU/ED-TENG)的TENG的工作機理和摩擦電輸出性能。a) TPU/ED-TENG工作原理示意圖。b) COMSOL Multiphysics軟件模擬了TPU/ED-TENG的相應電位分布。c) 開路電壓,d)短路電流,e)在2.2 Hz的工作頻率和10 N的機械力下,具有不同摻雜IL的TPU/ED-TENG的短路電荷轉移。f) TPU纖維和TPU/ED20纖維的平均表面電位的KPFM結果。g) TPU/ED20-TENG在低壓和高壓范圍內的開路電壓隨壓力的變化和靈敏度分別為0.855和0.163 V kPa?1。h) TPU/ED20-TENG的輸出電壓在20000次接觸-分離循環后沒有退化,表現出優異的長期穩定性。i) TPU/ED20-TENG通過橋式電路對0.33至14.7 μF不同容量電容器的充電曲線。j) 電流、電壓和峰值功率密度與1 MΩ至3 GΩ外部電阻的函數關系圖。外部電阻為80 MΩ時,可實現最大峰值功率密度。
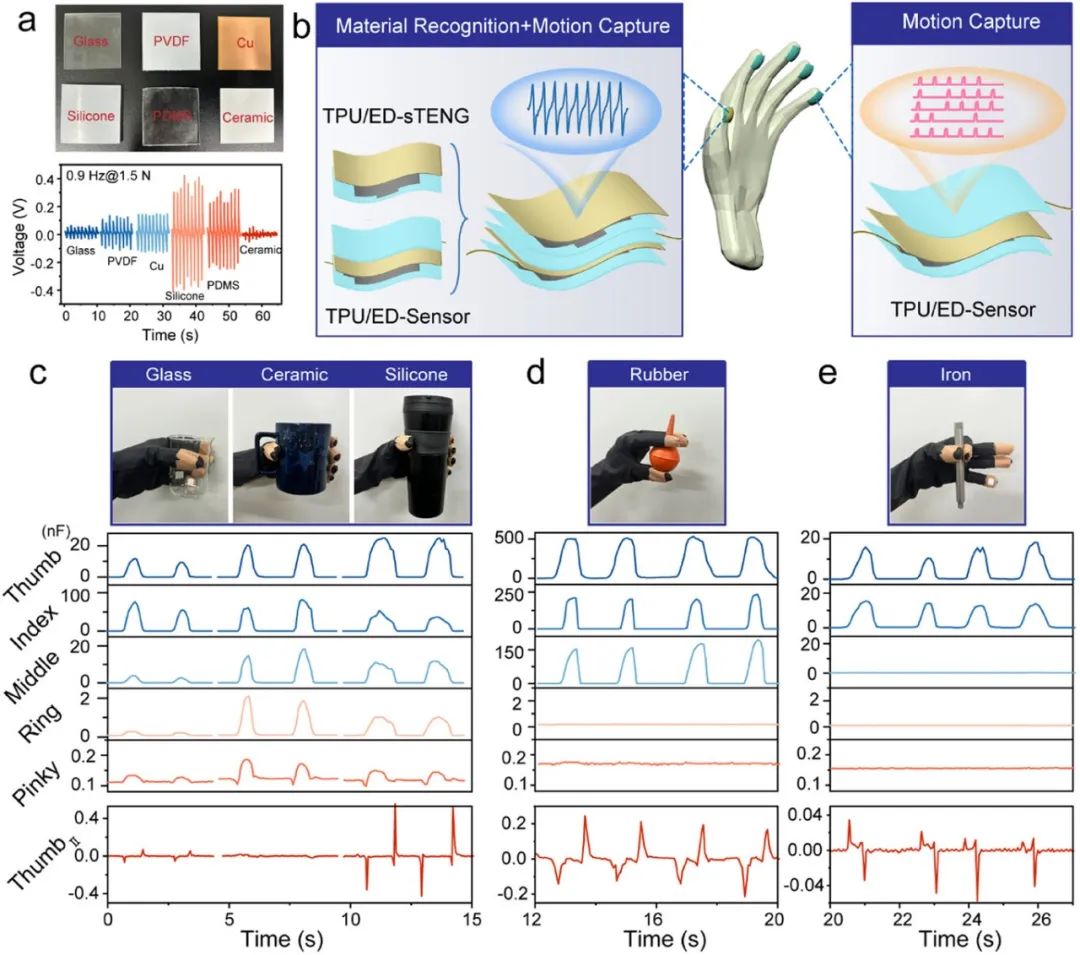
圖5. a) TPU/ED sTENG對不同材質物體的信號輸出。b) 拇指集成的TPU/ED sTENG和TPU/ED傳感器以及其他手指集成的TPO/ED傳感器的示意圖。當c)握住由玻璃、陶瓷和硅膠制成的杯子d)按下洗耳球e)握住鐵棒時,手套上的六個傳感器的輸出信號變化曲線。
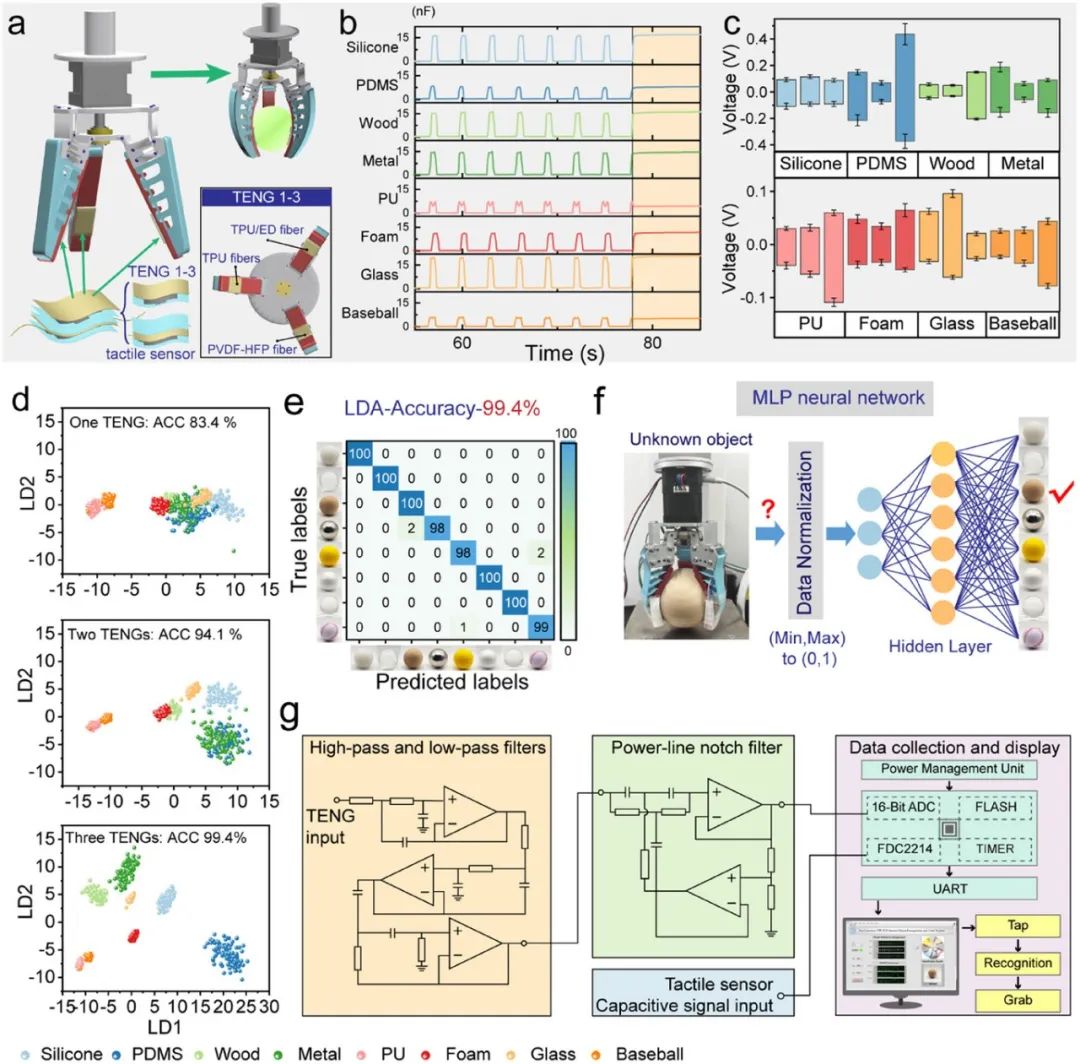
圖6. 機械夾具系統的機器學習輔助對象識別分類a)安裝有三組單電極TENG和觸覺傳感器的機械夾具示意圖。b) 傳感器3抓取八個物體并拾取它們的電容變化曲線。c) 三個TENG抓取八個物體100次產生的摩擦電壓的峰值分布。d) LDA繪制了不同數量的TENG夾持八種材料的數據可視化圖。e) TENG 1-3對8個物體的識別準確率為99.4%的混淆矩陣。f) 一種用于識別未知對象的MLP神經網絡模型。g) 基于TPU/ED光纖的傳感器物體識別與抓取系統的電路原理圖。
審核編輯 黃宇
-
傳感器
+關注
關注
2564文章
52700瀏覽量
764570
發布評論請先 登錄
南京工業大學:仿生觸覺傳感系統讓機器人擁有“人類指尖”般的細膩感知
超聲波多功能氣象傳感器:精準感知,氣象監測新利器
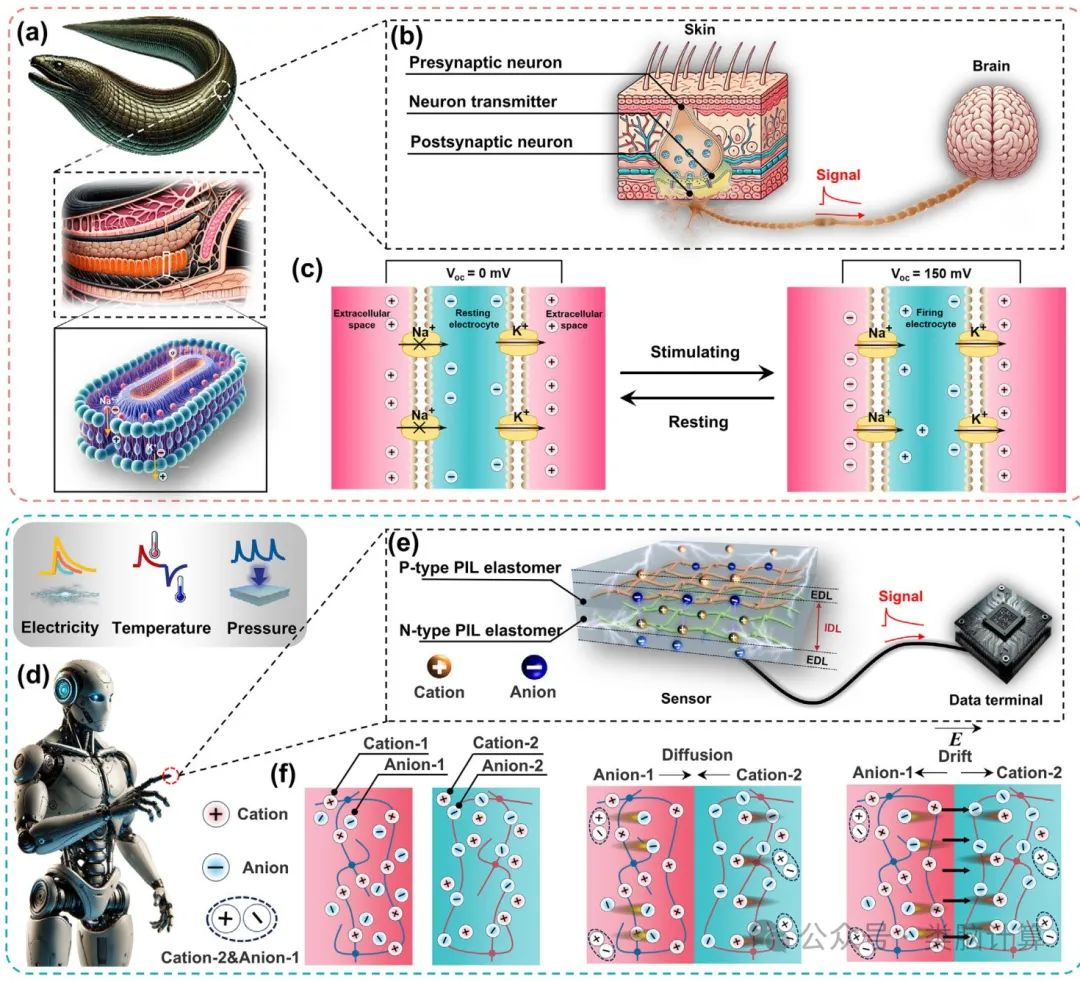
中國科學院:電鰻啟發離子電子人造皮膚,具有多模態感知和傳感器內儲層計算功能
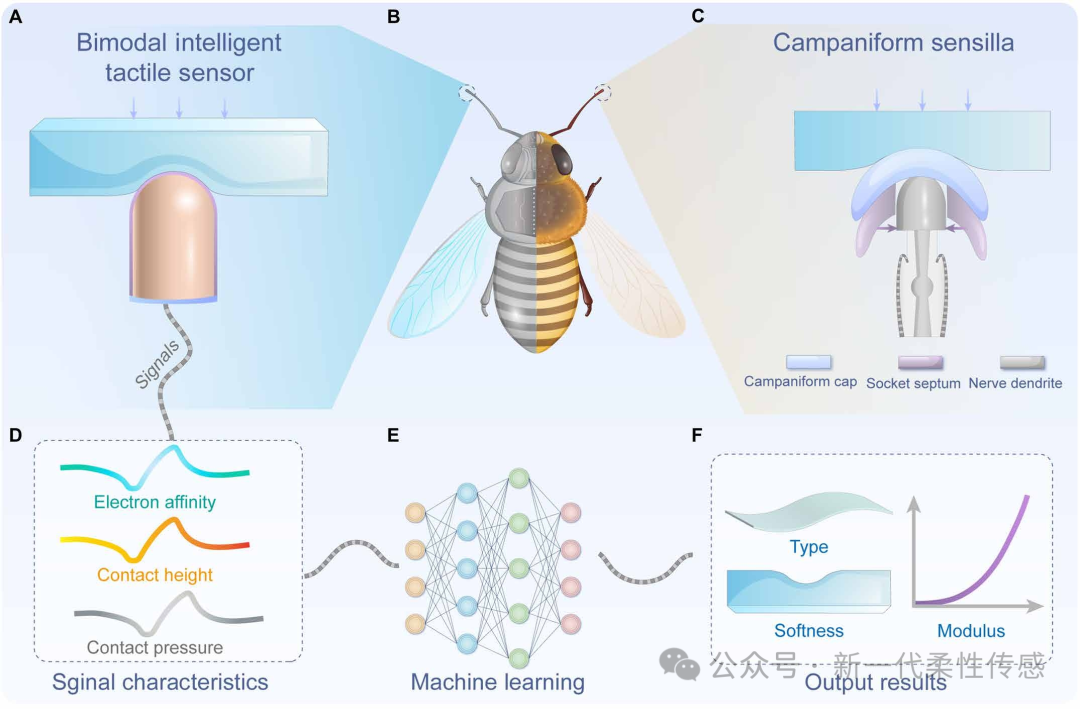
昆蟲觸角啟發研發雙模觸覺傳感器
仿生觸覺傳感器:觸碰未來的科技奇跡
廣西大學:用于高溫應用中的壓力和溫度傳感的摩擦電觸覺傳感器
提出紙做的觸覺傳感器
中國科大:在機器人觸覺傳感器研究中取得重要進展

傳感器的多功能應用:精準感知,智能控制

這批中國企業,在做人形機器人觸覺傳感器
Meta正努力推進人工智能觸覺傳感器的市場化進程
觸覺傳感器的發展,對機器人產業有什么影響?
TPS手指觸感測量一款可以精準測量力和時間變化的系統
利用HDPlas等離子功能化工藝,可增強CGM動態血糖儀微型傳感器性能
人形機器人感知變化的未來






 工商網監
工商網監
評論