 EtherCAT轉CANopen轉換機制:運動控制器與傳感器數據交互的核心技術解析
EtherCAT轉CANopen轉換機制:運動控制器與傳感器數據交互的核心技術解析
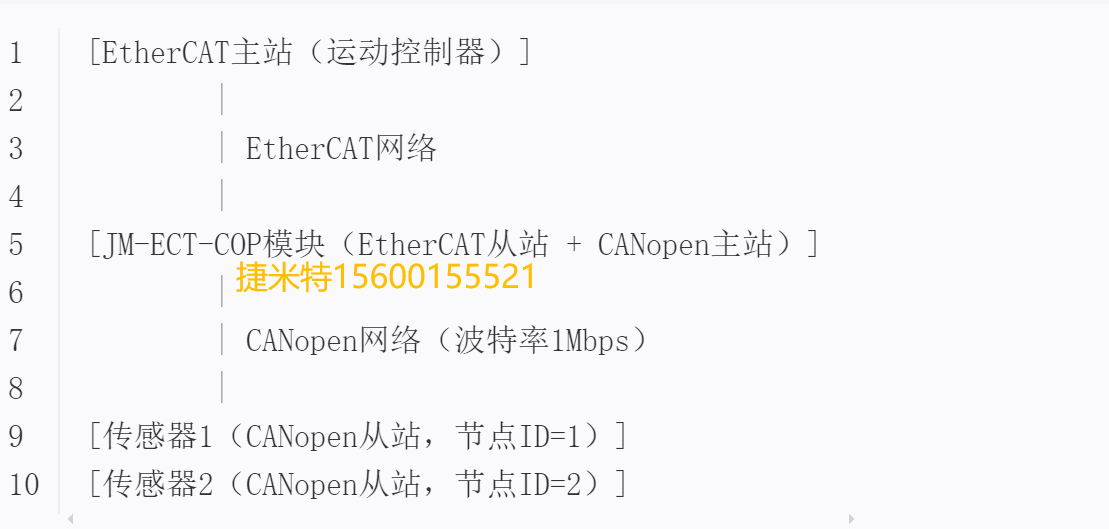
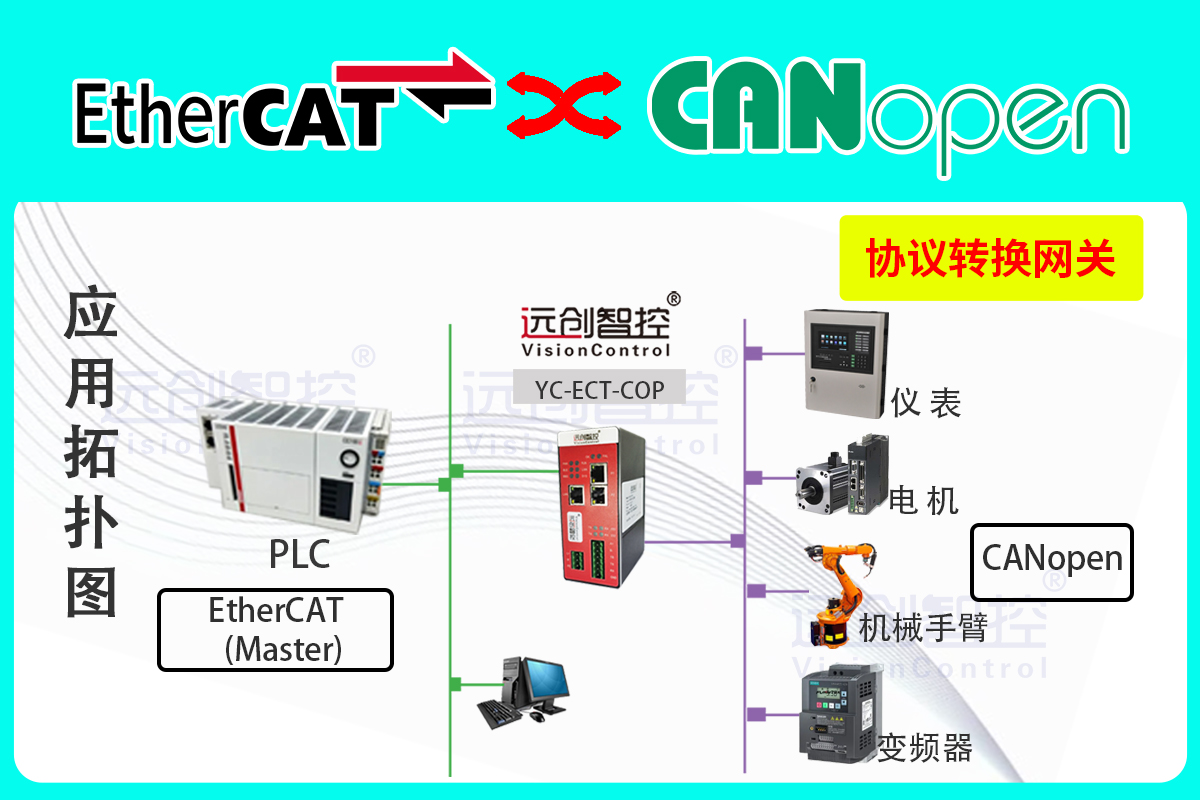
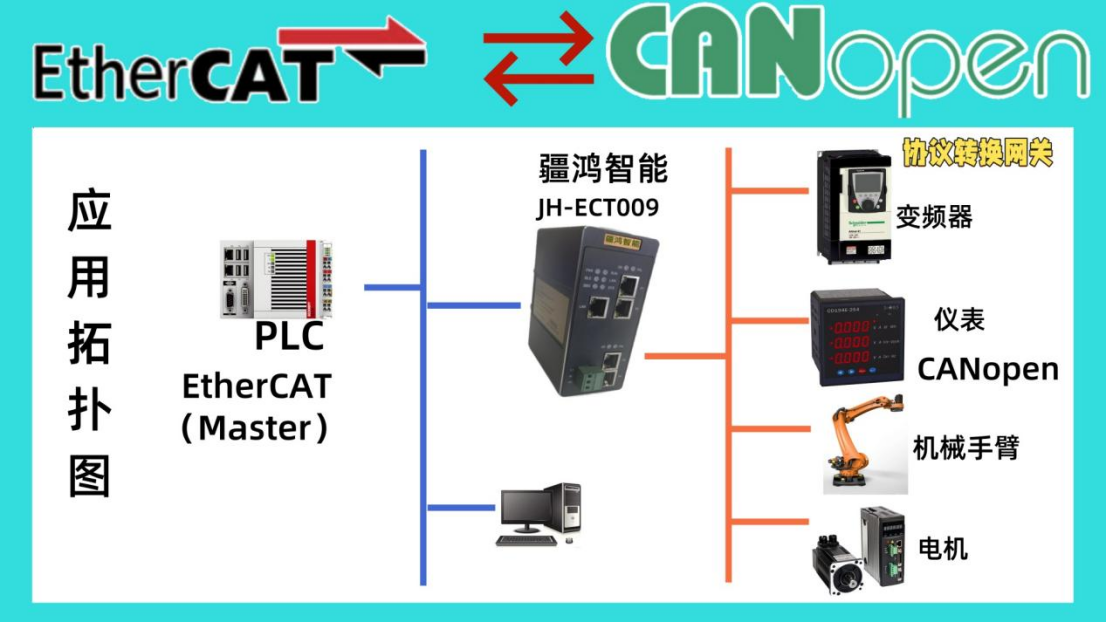
在某高端自動化制造工廠的生產線上,采用了先進的Ethercat運動控制器作為主站設備,以實現對生產線各個環節的精確控制和高速數據傳輸。然而,現場的許多外部傳感器設備采用的是Canopen協議進行通信,這就導致了主站設備與傳感器之間存在通信協議不兼容的問題。為了實現Ethercat主站對外部傳感器信號的采集,確保生產線的高效穩定運行,工廠引入了捷米特JM-ECT-COP協議轉換模塊,用于實現Ethercat轉Canopen的通信轉換。實現以下功能:

·?EtherCAT從站?:接收主站控制指令
·?CANopen主站?:主動采集外部CANopen從站傳感器數據
·?協議轉換?:將CANopen數據映射至EtherCAT過程數據對象(PDO)
硬件配置?
1.?接線說明?
o?EtherCAT接口?
§主站與JM-ECT-COP模塊通過RJ45網線連接,啟用菊花鏈拓撲。
§終端電阻:網絡首尾節點啟用120Ω終端電阻。
o?CANopen接口?
§JM-ECT-COP模塊的CAN_H/CAN_L端子連接傳感器總線,線纜屏蔽層接地。
§波特率:1Mbps(需與傳感器參數一致)。
2.?模塊指示燈狀態?
o?EtherCAT狀態燈?:綠色常亮表示主站通信正常。
o?CANopen狀態燈?:閃爍表示總線激活,紅色表示通信故障。
?軟件配置步驟?
?1.EtherCAT主站配置(以TwinCAT為例)?
1.?掃描從站設備?
o在TwinCATSystemManager中掃描EtherCAT網絡,識別JM-ECT-COP模塊(需加載其ESI文件)。
o確認模塊的?VendorID?(0x00000XXX)和?ProductCode?(0xXXXXXXX)
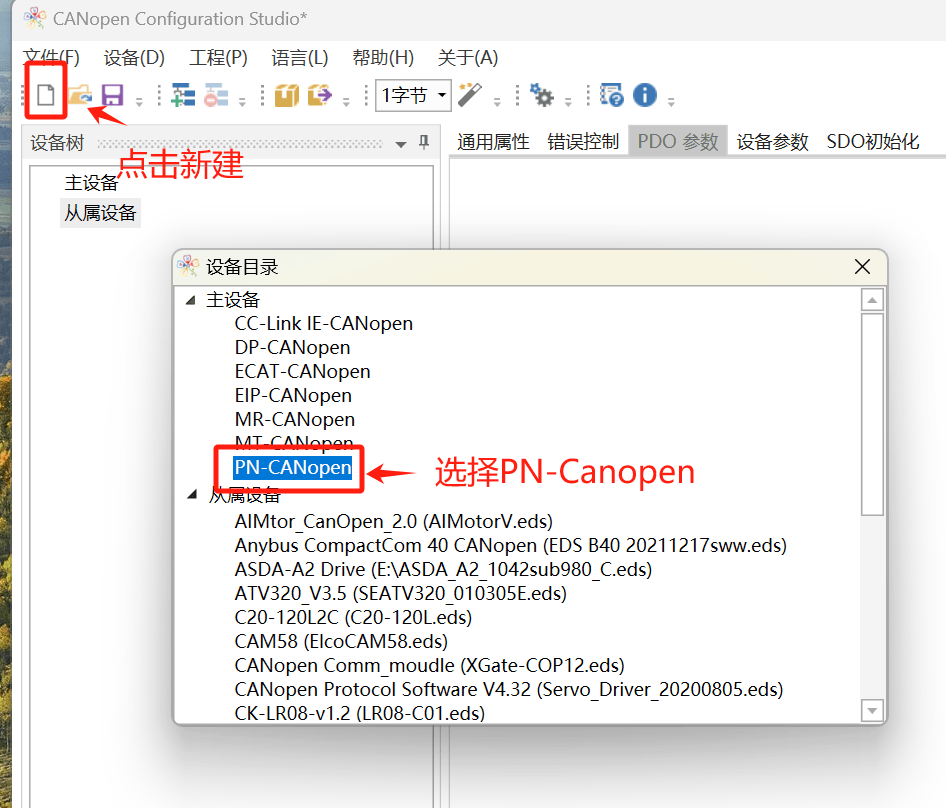
2.JM-ECT-COP模塊配置(使用JMTether配置工具)?
1.?EtherCAT從站參數?
o設置?站地址?(默認為0,自動分配)、?看門狗時間?(建議500ms)。
o
2.?CANopen主站參數?
o?波特率?:1Mbps(需與傳感器一致)。
o?節點掃描?:自動掃描總線上的CANopen從站設備(節點ID=1和2)。
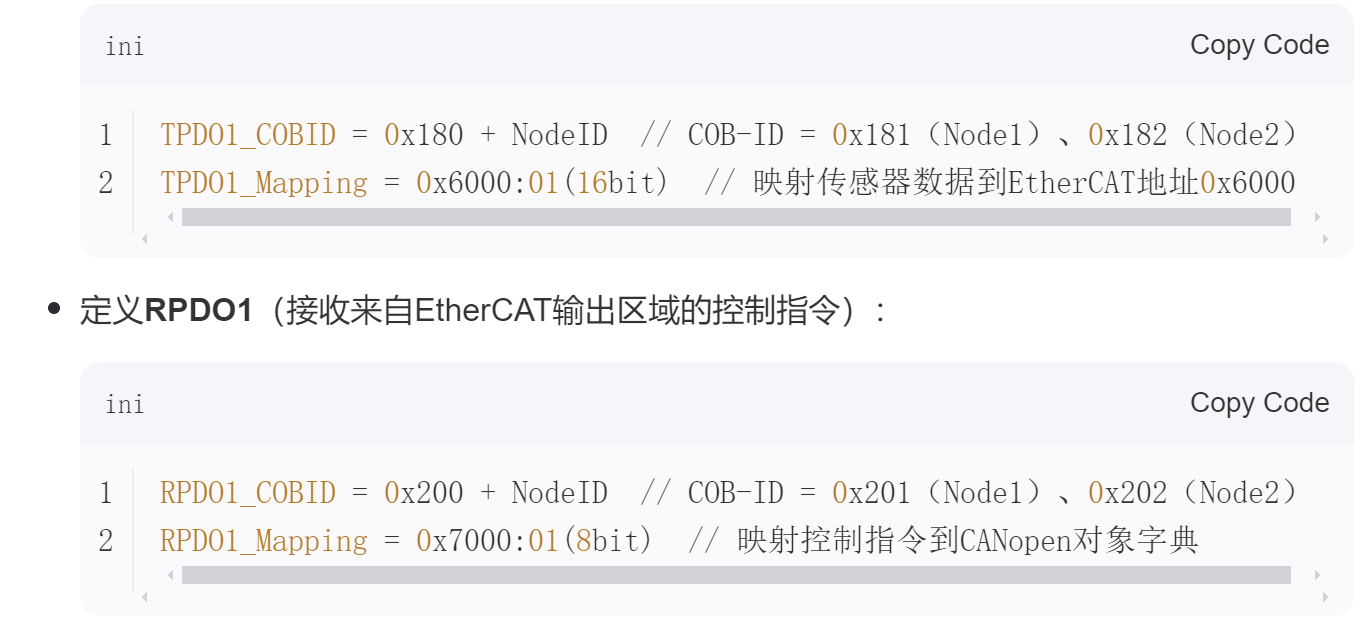
o?PDO映射?:
§定義?TPDO1?(發送到EtherCAT輸入區域):
1.?保存并下載配置?
o將配置文件下載至模塊,重啟生效。
?3.傳感器配置(以CANopen編碼器為例)?
1.?節點ID設置?
o通過撥碼開關或軟件工具設置傳感器節點ID(1和2)。
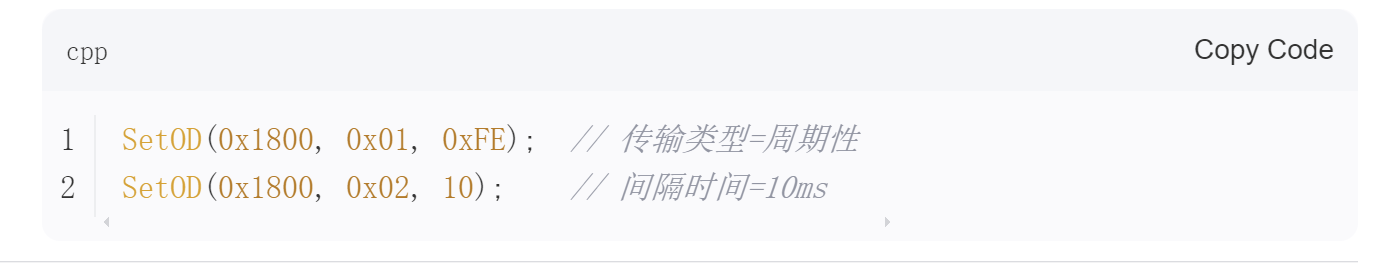
2.?PDO通信參數?
o配置傳感器?TPDO1?為周期性發送模式,傳輸間隔10ms:
通信測試與驗證?
1.?EtherCAT主站狀態監控?
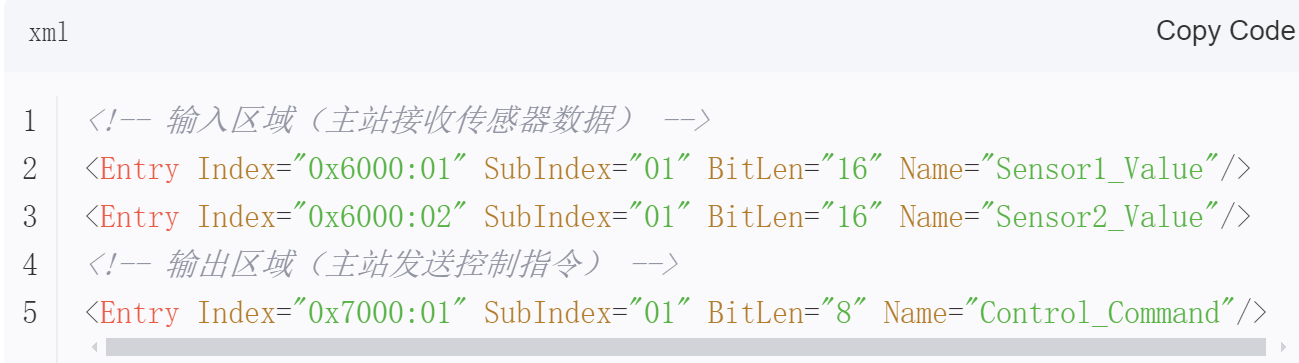
o在TwinCATScope中監控地址0x6000:01和0x6000:02,確認傳感器數據實時更新。
2.?CANopen總線診斷?
o使用CANalyzer工具捕獲CAN報文,驗證COB-ID和數據一致性:
3.?實時性測試?
o測量EtherCAT輸入數據延遲:從傳感器觸發到主站接收應小于2ms(1Mbps波特率下)。
方案優勢?
1.?實時性?:EtherCAT周期同步(<1ms)+CANopen高速傳輸,滿足運動控制需求。
2.?兼容性?:支持標準CANopenDS301/DS402協議傳感器。
3.?靈活性?:通過PDO映射可擴展至32個CANopen從站設備。
? 總結?:通過捷米特JM-ECT-COP模塊實現EtherCAT與CANopen協議的無縫轉換,解決了Ethercat主站設備與Canopen傳感器之間的通信難題,為運動控制系統提供了高效、可靠的多傳感器采集方案,適用于機器人、數控機床等高實時性場景。
通過引入捷米特JM-ECT-COP協議轉換模塊,成功實現了Ethercat轉Canopen的通信轉換,解決了Ethercat主站設備與Canopen傳感器之間的通信難題。該解決方案不僅提高了生產效率和產品質量,還降低了系統集成的難度和成本。在工業自動化領域,捷米特JM-ECT-COP模塊為Ethercat轉Canopen的應用提供了一種可靠、高效的解決方案,具有廣泛的推廣應用價值。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
447瀏覽量
25184 -
CANopen
+關注
關注
8文章
376瀏覽量
44588 -
ethercat
+關注
關注
19文章
1056瀏覽量
39726
發布評論請先 登錄
CANopen轉EtherCAT網關通過PLC與伺服的數據交互

CANopen轉EtherCAT網關:基于倍福CX5140主站與CANopen傳感器的工業通信方案
協議大和解:ETHERCAT轉CANopen網關配置

EtherCAT轉CANopen協議網關應用詳解
異構協議融合:Profinet轉EtherCAT網關與西克傳感器協同配置解析


開疆智能Profinet轉canopen網關連接易福門(IFM)傳感器配置案例

EtherCAT轉CANopen配置CANopen側的PDO映射

EtherCAT轉CANOPEN:技術突破與未來展望!

奇妙聯動!EtherCAT轉CANopen網關與傳感器開啟宇宙導航







 工商網監
工商網監
評論