 談及低空經濟:eVTOL配套的慣導是什么樣的
談及低空經濟:eVTOL配套的慣導是什么樣的
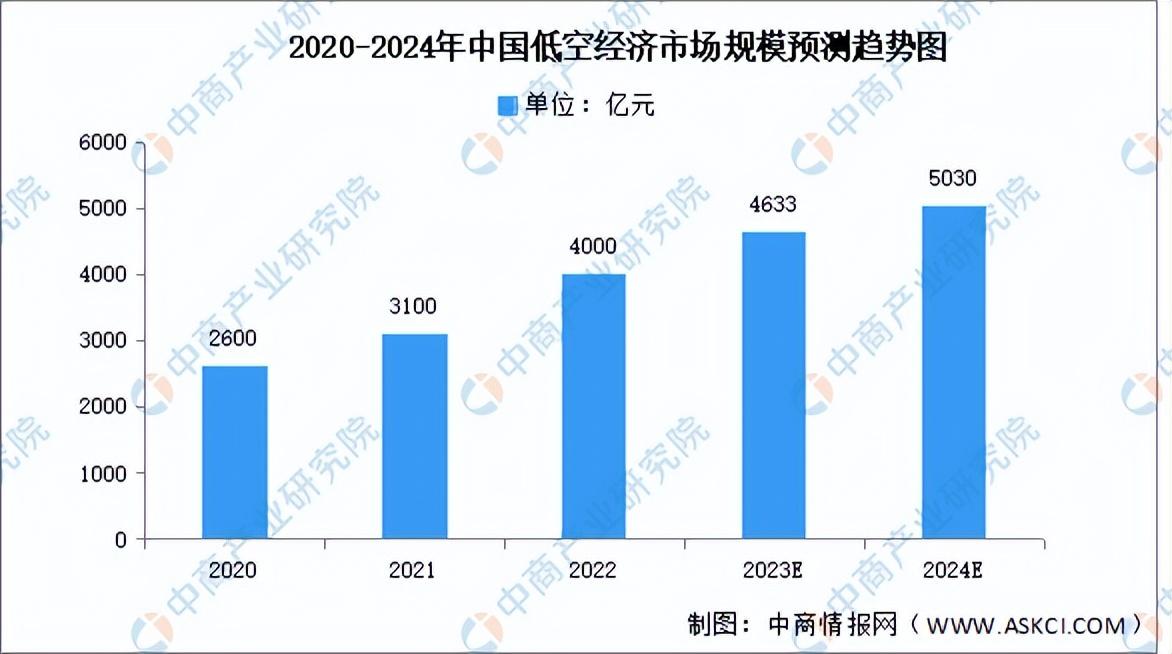
低空經濟中的eVTOL(電動垂直起降飛行器)無人駕駛飛行機需要高度可靠、高精度的慣性導航系統(INS)來保障飛行安全與效率。結合技術需求和應用場景,其慣導系統的核心要求如下:
1. 高精度與抗干擾能力
需求背景:低空空域(尤其是1000米以下)環境復雜,存在建筑物、地形、氣象等多重干擾因素,需導航系統在動態環境中保持厘米級定位精度。
技術實現:
多傳感器融合:慣導系統需整合高精度陀螺儀、加速度計、GNSS(全球導航衛星系統)等,并通過算法實現數據融合,以應對衛星信號遮擋或電磁干擾場景。
抗電磁干擾設計:低空電磁環境復雜,需采用抗干擾技術(如自適應濾波、頻段動態分配)確保導航信號穩定性。
 智騰無人機慣導IMU
智騰無人機慣導IMU
2. 動態環境適應性與實時性
需求背景:eVTOL在城市密集區飛行時需快速響應障礙物避讓、航路動態調整等任務,要求慣導系統具備毫秒級實時數據處理能力。
技術實現:
AI與邊緣計算:結合人工智能算法(如深度學習)優化路徑規劃,實時處理傳感器數據并預測飛行姿態變化。
低時延通信:通過5G或專用低空通信網絡實現與地面控制系統的實時數據交互,確保導航指令的即時執行。
3. 冗余與容錯設計
需求背景:無人駕駛飛行對系統可靠性要求極高,需應對單點故障風險。
技術實現:
多冗余傳感器:采用多套慣性測量單元(IMU)和備份導航系統(如視覺導航、激光雷達),實現故障切換與數據校驗。
自適應容錯算法:在部分傳感器失效時,系統可自動切換至備用方案并維持導航精度。
4. 輕量化與低功耗
需求背景:eVTOL對載重和續航敏感,慣導系統需在小型化、輕量化前提下保持高性能。
技術實現:
集成化芯片設計:采用MEMS(微機電系統)技術實現陀螺儀和加速度計的小型化,降低功耗。
能源優化管理:與飛行器動力系統協同設計,減少額外能耗。
5. 環境感知與協同導航
需求背景:低空飛行需與空域管理系統(如航路規劃、其他飛行器避讓)深度協同。
技術實現:
空域態勢感知:結合雷達、ADS-B(廣播式自動相關監視)等外部數據,動態調整飛行路徑。
協同導航協議:通過統一通信標準實現與地面基站、其他飛行器的信息共享,提升空域利用效率。
 智騰雙天線高精度組合導航系統
智騰雙天線高精度組合導航系統
總結
eVTOL無人駕駛飛行機的慣導系統需綜合高精度傳感器、AI算法、冗余設計、輕量化技術及空域協同能力,以應對低空復雜環境下的導航挑戰。未來,隨著低空經濟政策的推進(如空域管理改革)和技術突破(如量子導航、6G通信),慣導系統將進一步向智能化、高可靠性方向發展。
審核編輯 黃宇
-
無人駕駛
+關注
關注
99文章
4137瀏覽量
122576 -
eVTOL
+關注
關注
0文章
126瀏覽量
376
發布評論請先 登錄
億緯鋰能亮相2025低空經濟產業發展論壇
政策賦能低空經濟,峰飛航空加碼研發把握eVTOL新時代
低空經濟崛起!峰飛航空eVTOL技術引領未來出行變革
沃蘭特完成Pre-B輪融資,加速低空經濟eVTOL發展
低空經濟的精準脈搏——晶振

納雷科技被列為低空經濟eVTOL產業鏈毫米波雷達關鍵供應商
eVTOL產業鏈PC材料關鍵供應商 恩高光學邀您參加2024深圳eVTOL展

鵬城9月,eVTOL OEM翹楚齊聚2024深圳eVTOL展
航電創新 驅動未來!2024深圳eVTOL展航電展—探索低空經濟新藍圖

低空經濟崛起:一探2024年的新風口
亞太萬人eVTOL展!2024深圳eVTOL將于9月登陸鵬城
人工智能如何助力低空經濟發展?
深度解析eVTOL三電系統,低空經濟邁向萬億時代
“空中大腦”上崗,為低空經濟提速






 工商網監
工商網監
評論