 用 樹莓派 Zero 打造的智能漫游車!
用 樹莓派 Zero 打造的智能漫游車!
使用 PXFMini 和樹莓派 Zero 打造您自己的自主漫游車。
本項目所用組件
硬件組件
Erle Robotics PXFmini × 1
樹莓派 Zero × 1
樹莓派 2 Model B × 1
樹莓派3 Model B × 1
軟件應用與在線服務
APM 飛行棧
https://github.com/ArduPilot/ardupilot
http://ww1.erlerobotics.com/docs/Artificial_Brains_and_Autopilots/Operating_System_images/Debian.html?usid=23&utid=10554077391
項目背景
本教程將展示如何使用樹莓派 Zero 打造一款 Linux 無人機。該無人機采用具備實時處理能力的 Linux 內核、基于 Debian 的文件系統,以及專為 PXFmini 自動駕駛儀板編譯的 Dronecode APM 飛行棧。所有這些組件均由 Erle Robotics 集成到其面向 PXFmini 的操作系統鏡像中。
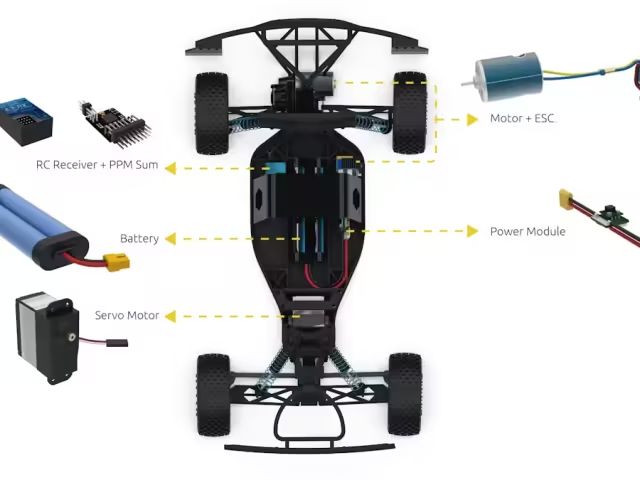
利用以下元件打造的 Erle-Rover。您需將這些組件連接到兼容的自動駕駛儀上才能投入使用:
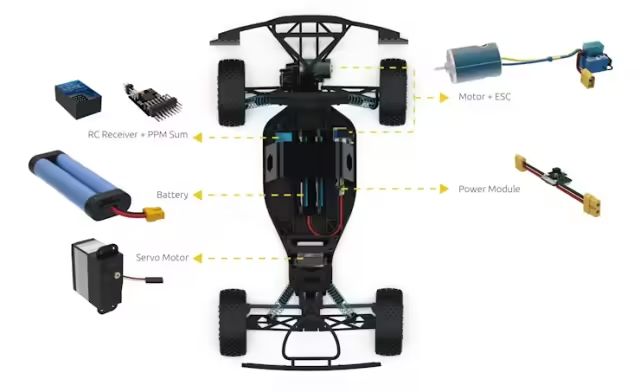
Pi0Rover 及其組件
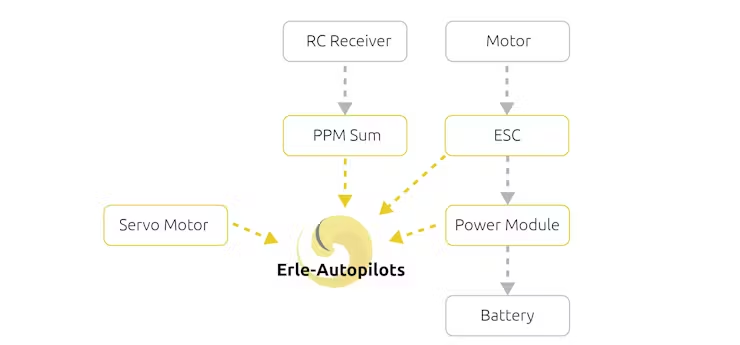
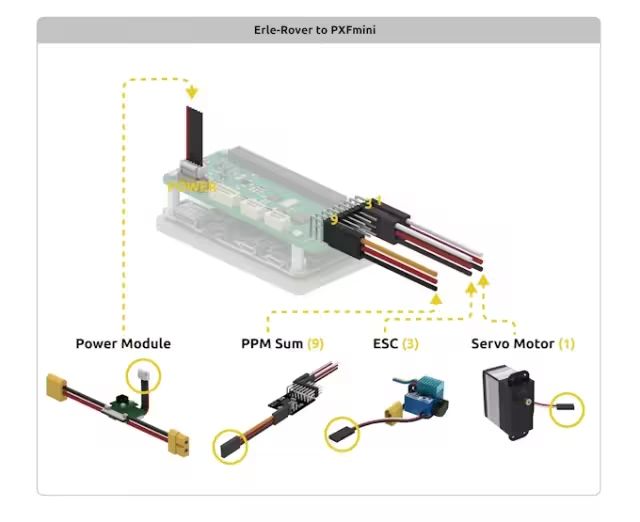
Erle-Rover 組件的連接方式:
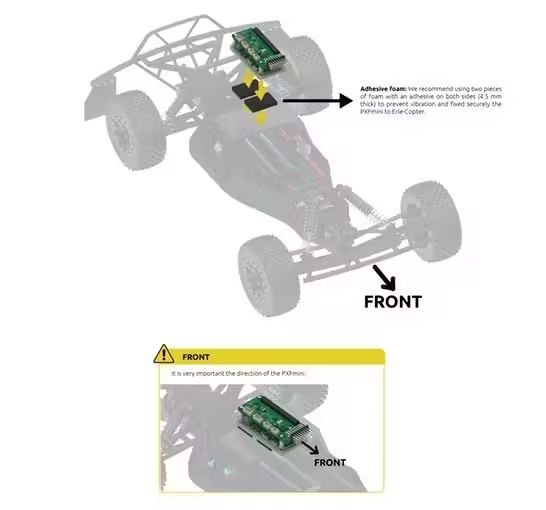
第一步:準備自動駕駛儀
預計耗時:30 分鐘
按照以下說明,將 PXFmini 擴展板安裝到樹莓派 Zero 上:

PXFmini(全稱為 PixHawk Fire Cape mini),可用于構建機器人和無人機。

準備工作已接近完成,但您仍需為樹莓派 Zero + PXFmini 組合安裝合適的軟件。這應包括飛行棧、適配的內核、開機自動啟動的守護進程以及其他實用功能。

幸運的是,如果您從 Erle Robotics 購買了 PXFmini,將獲得其 Debian 鏡像的訪問權限,這些鏡像已包含上述所有內容。您只需獲取與 PXFmini 兼容的 Debian 鏡像,并將其刷入 microSD 卡即可。
第二步:安裝自動駕駛儀
預計耗時:30 分鐘
可使用多種方法將自動駕駛儀(樹莓派 Zero + PXFmini)安裝到無人機上。選擇適合您的方法,并將電源模塊的 JST GH 電纜連接到 PXFmini。這樣,當電池接入時,即可為自動駕駛儀供電。
接下來,在自動駕駛儀上安裝 PWM 通道。將您的電子調速器(ESC)電纜連接好,將舵機 1(對應轉向功能)連接到 PWM 通道 1,將 ESC 2 連接到 PWM 通道 2(對應油門功能)。
最后,您需要一種控制無人機的方法。我提供兩種方法:
WiFi + 游戲手柄:讓自動駕駛儀通過 USB 加密狗創建自己的 WiFi 網絡(Erle Robotics 鏡像默認支持此功能),并使用普通游戲手柄通過地面控制站控制無人機。
WiFi + ROS:您是否了解機器人操作系統(ROS)
您可以使用 ROS 節點來可視化飛行模式、狀態,并控制無人機。
傳統遙控:您也可以購買一款支持 PPMSUM 協議的遙控器,并將其連接到自動駕駛儀(連接到 PPM-SUM 輸入通道)。
-
Linux
+關注
關注
87文章
11439瀏覽量
212585 -
無人機
+關注
關注
230文章
10679瀏覽量
185256 -
樹莓派
+關注
關注
120文章
1920瀏覽量
106872
發布評論請先 登錄
樹莓派zero使用USB HUB集線器的問題
使用樹莓派設計智能小車教程之樹莓派智能車系統啟動的詳細資料說明
微雪電子樹莓派Zero Raspberry主板介紹

微雪電子樹莓派 Zero WH介紹

微雪電子樹莓派RPi Zero W介紹

dfrobot樹莓派Raspberry Pi Zero簡介








 工商網監
工商網監
評論