 魔視智能亮相第五屆焉知汽車年會
魔視智能亮相第五屆焉知汽車年會

近日,在第五屆焉知汽車年會“智能輔助駕駛論壇”上,魔視智能乘用車產品副總經理張崢以《智駕模型的泛化思路》為主題,深度剖析了智能駕駛技術的演進邏輯與核心挑戰。
作為深耕智駕領域多年的先行者,魔視智能以“泛化能力”為突破口,提出從感知升級到認知覺醒的全鏈路解決方案,為行業提供了應對復雜場景、突破數據瓶頸的新思路。
感知的邊界,是智駕泛化的第一道門檻。魔視智能用“融合”與“治理”雙輪驅動,讓機器“看得見”更“看得懂”。
張崢指出,感知模型的泛化能力是智駕系統的基石。魔視智能通過 “傳感器性能+數據驅動+算法進化”三位一體路徑,構建全方位的環境理解能力。
傳感器融合創新
打破單模態局限,整合攝像頭、激光雷達、毫米波雷達等多傳感器數據,通過多模態時空前融合算法,實現語義、空間、運動信息的精準捕捉。
4D數據治理體系
自主研發自動化標注工具與大模型挖掘技術,實現場景元素的高效提取與失效案例閉環,結合3D資產庫與AIGC生成,破解長尾數據難題,降低數據邊際成本。
算法迭代進化
從單模態白名單任務到通用感知任務,引入開集數據自監督預訓練與視覺語言對齊,提升模型對未知場景的適應性。

端到端的“快”需要海量數據支撐,而“穩”則依賴對現實邏輯的深度理解。我們用仿真與實車數據“兩條腿走路”,讓算法既聰明又可靠。
在決策規劃層面,魔視智能提出了分階段泛化策略,兼顧性能上限與落地可行性。
規則優先,夯實下限
基于結構化感知的經典規劃器,通過仿真數據快速驗證規則邏輯,確保基礎安全性與功能穩定性。
兩段式端到端,模仿人類
以感知結果為輸入,結合強化學習優化類人駕駛行為,平衡規則與數據驅動的優勢。
一段式端到端,突破天花板
探索感知-決策-控制一體化模型,依托3DGS場景重建與虛幻5仿真環境,生成高多樣性數據,結合強化學習挖掘模型潛力。

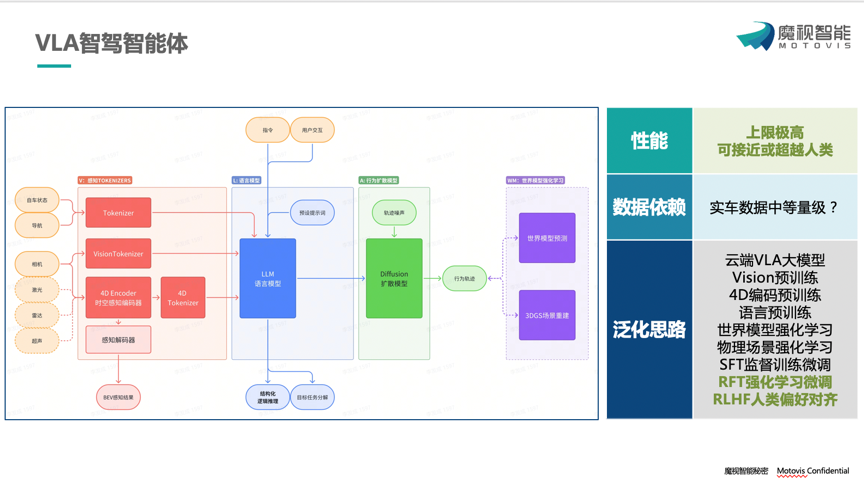
VLA不是技術的終點,而是認知的起點。當智駕系統學會“思考”,數據將從“燃料”變為“催化劑”。
張崢表示,當我們面對數據驅動的局限性,魔視智能將目光投向視覺語言行為(VLA)范式——一種更接近人類認知的智能體架構。
VLA的核心優勢
通過視覺模塊、語言模塊、行為模塊的協同,賦予智駕系統常識推理與交互學習能力,減少對海量數據的依賴。
認知覺醒的關鍵
基于R1強化學習范式,利用少量數據微調即可實現跨場景泛化;通過世界模型+人類偏好對齊,讓VLA在非同源環境中快速適應,甚至超越人類司機的表現。
云端到板端的落地路徑
先在云端訓練大模型,再通過知識蒸餾部署輕量化板端模型,兼顧性能與算力效率。
從多模態感知到VLA智能體,在這場技術與認知的雙重革命中,魔視智能已率先邁出關鍵一步,不僅展現了其對技術趨勢的前瞻洞察,更揭示了 “以認知驅動泛化”的戰略版圖。
未來,魔視智能持續探索智能駕駛邊界,逐步構建更像人、更聰明、更高效的智駕生態體,為行業打開認知智駕的新紀元。
-
智能駕駛
+關注
關注
4文章
2801瀏覽量
49901 -
輔助駕駛
+關注
關注
1文章
277瀏覽量
15428 -
魔視智能
+關注
關注
0文章
45瀏覽量
1535
原文標題:從“看見”到“認知”,魔視智能解碼智駕泛化之道
文章出處:【微信號:motovis,微信公眾號:魔視智能MOTOVIS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
洲明光顯創新成果亮相第五屆數博會
東風猛士科技亮相第五屆中國國際消費品博覽會
云天勵飛亮相第五屆中國國際消費品博覽會
瑞豐光電亮相DVN第五屆(科隆)汽車內飾與智能座艙研討會
東風汽車入圍第五屆《汽車風云盛典》
魔視智能MOTOVIS獲「2024年度SASD中歐智能汽車科技創新獎」

格陸博科技亮相2024第五屆智能網聯汽車與自動駕駛創新國際峰會
上海貝嶺亮相第五屆汽車電驅動及關鍵技術大會
意瑞半導體亮相第五屆汽車電驅動及關鍵技術大會

同星智能將攜最新版TSMaster軟件及以太網產品亮相焉知汽車年會

曠視亮相第五屆民航未來機場高峰論壇,展示智慧民航領域的應用成果






 工商網監
工商網監
評論