 無刷電機FOC控制筆記
無刷電機FOC控制筆記

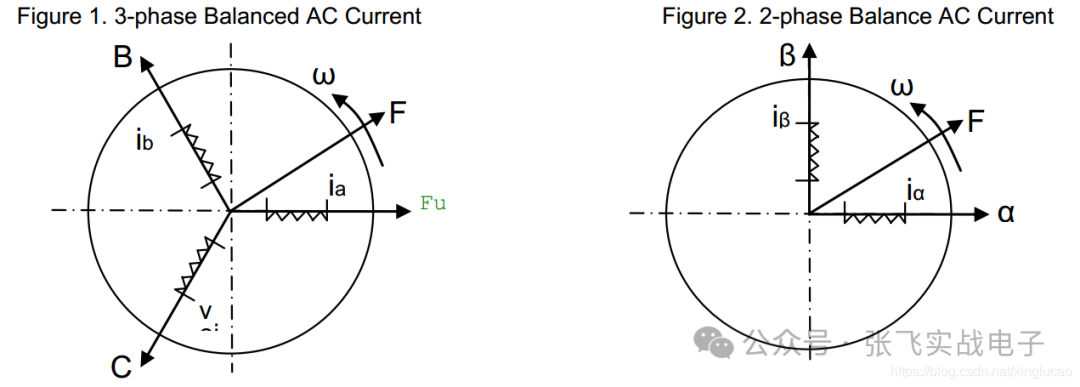
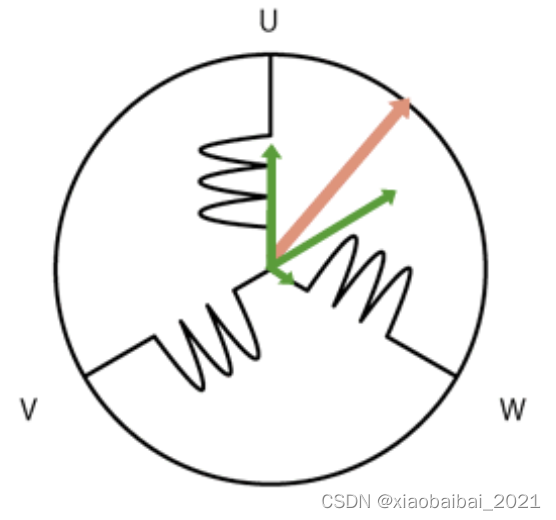
矢量控制的核心思想是為了簡化無刷電機的控制模型,將一個需要換相的無刷電機通過各種算法變換,抽象為一個直流電機的控制模型,只需要控制簡單的兩個直流分量來控制無刷電機,其中Vq抽象為直流電機的兩端電壓,Vd可調節電機力矩,但這個模型需要一個實時的電機軸角度θ參與計算。
為了實現這個直流電機的控制模型,需要用到兩個數學變換,即clarke變換和park變換。需要用到最原始的PID控制器等內容。
一、clarke變換:
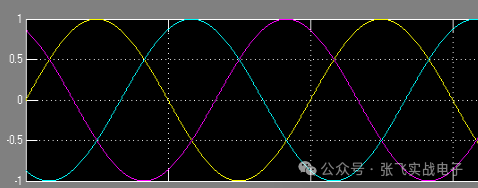
初衷是將三相的磁路模型變換成正交的兩相磁路模型,即將三相abc,變換為兩相α,β
波形如下圖
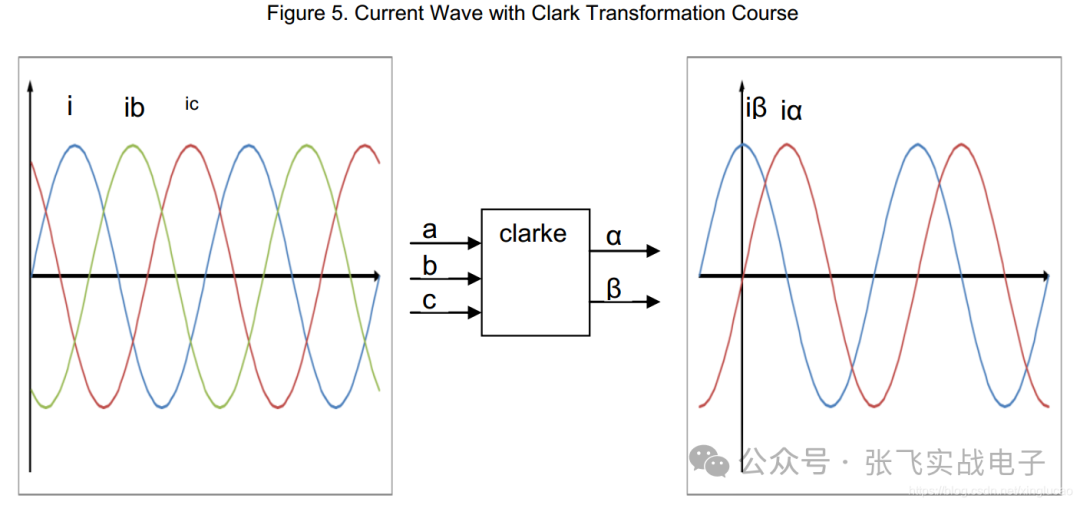
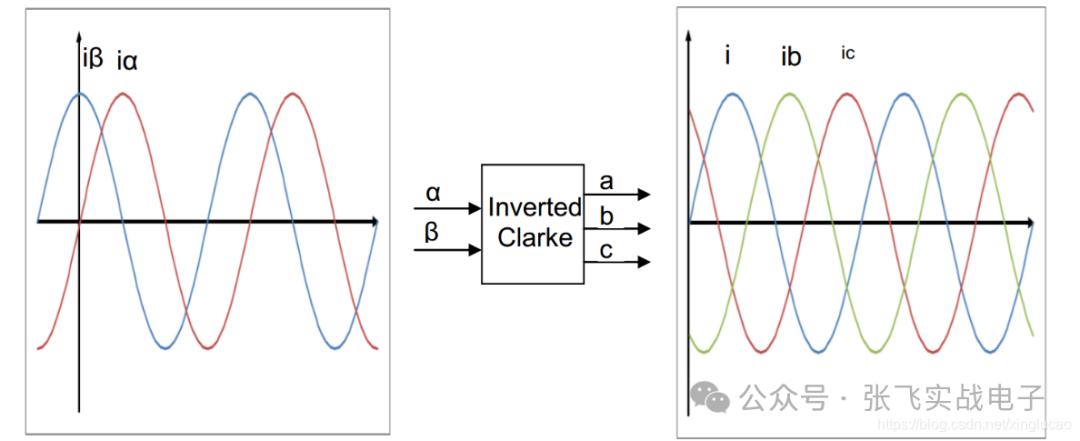
clarke逆變換則是反過來變換,已知α,β,求abc
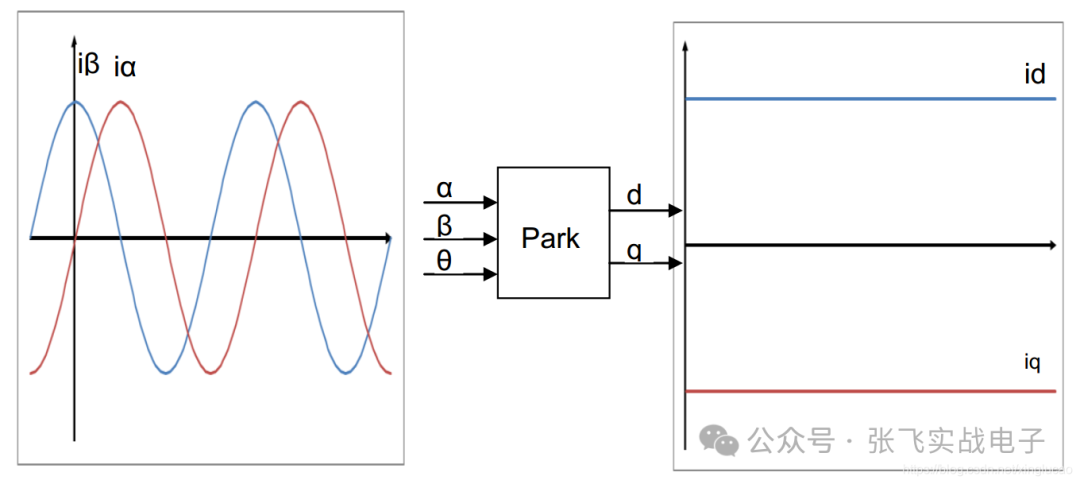
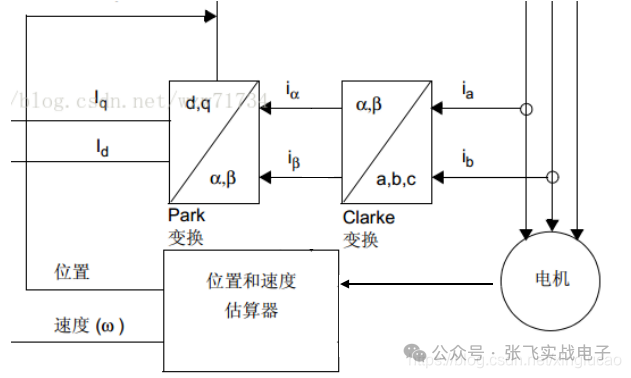
二、park變換:
通過clarke變換,變量已經由三個變少到兩個,但是依然是一個交流分量,對于控制來說依然不夠友好,所以引入了park變換,將兩相的坐標軸看做轉子沿著圓形旋轉起來,便可以得出兩個直流量q、和d。
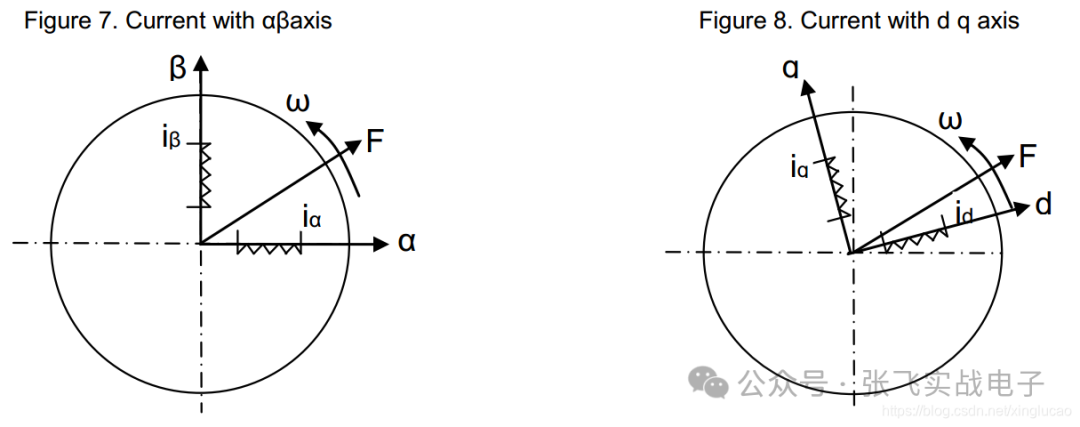
這樣變換后周期變化的波形變化成了兩個直流的信號,對于控制來說非常友好,即將α,β,θ轉換為q,d
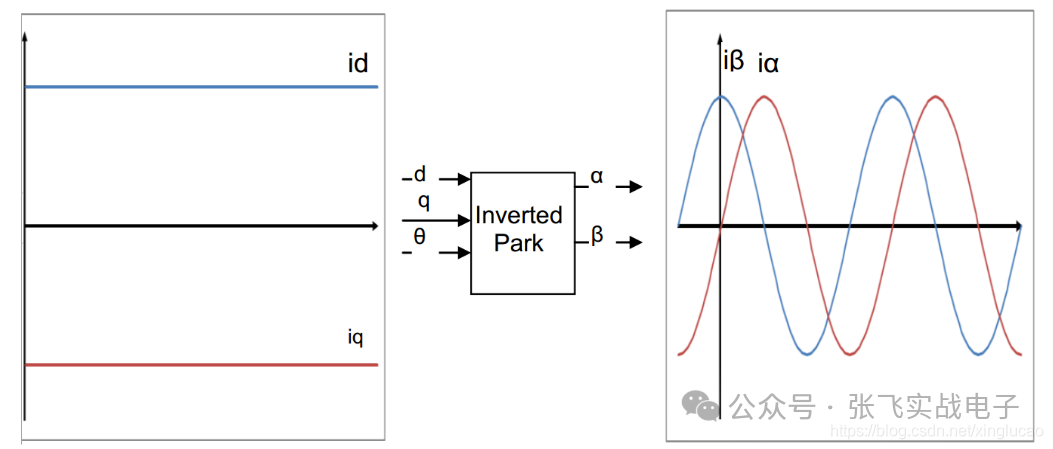
park逆變換則是反過來變換,已知q,d和電角度θ,轉換成α,β
三、了解了上面的兩個變換,我們將它變現,對,先讓電機轉起來吧
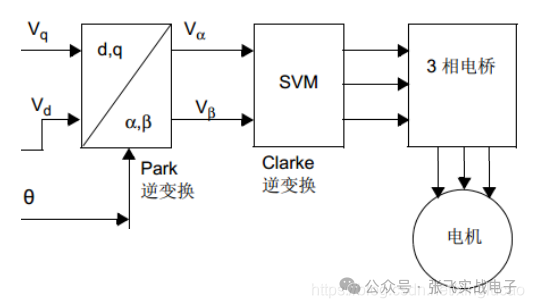
使用park逆變換,和clarke逆變換,很容易就能將無刷當做一個直流電機轉起來
輸入參數有三個:Vq,Vd,和實時電角度θ(theta),其中Vq,Vd是兩個直流分量,可控制無刷電機的轉速和力矩。θ則是通過間接或者直接測量得到的輸出軸的實際角度,關于電角度和機械角度的文章很多,可以百度查清楚。
通過這兩個逆變換后得到了abc的電壓,Va,Vb,Vc,將這三個值輸出到pwm的三個通道的比較輸出寄存器中,即可將無刷電機驅動起來,筆者使用Vq = 3000,Vd = 0做的測試,一個單磁極的內轉子電機無聲的轉到4000多rpm。
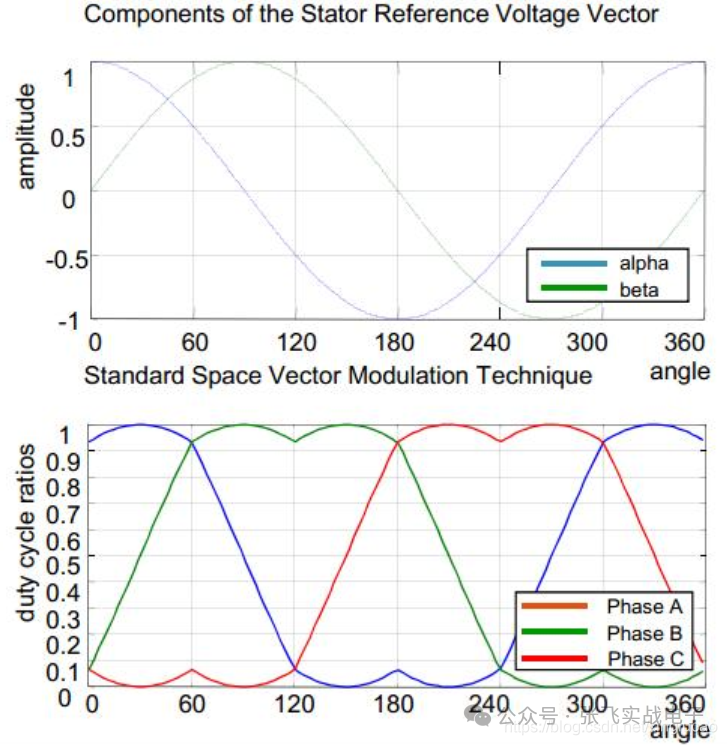
通過變換后,Vα,Vβ的波形和pwm的duty的波形,到此電機可以通過Vq直接控制無刷電機轉動,反轉則給Vq一個負數即可。
四、無刷電機能通過一個直流分量轉起來了,但是是開環控制,矢量控制其中有個優點就是功率因數可以做的很好,原因就是電流和電壓的波形很一致,那如果是開環控制,這個優點就不一定有保證,而且增加電流環后力矩也可以得到控制。
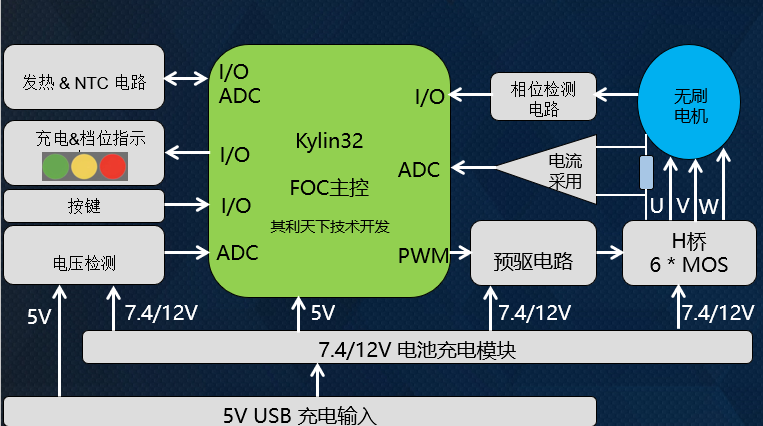
廢話不多說,對于算法而言,需要采集到電機三相的線上電流,可以通過三電阻采樣法,單電阻采樣法,相電流直接采樣法等等方法獲得,具體可以百度一下。
通過電流采集業務觀測到的三相電流Ia,Ib,Ic波形如下,與控制輸出給電機的Va,Vb,Vc波形相位相同。由于在任意時刻滿足Ia+Ib+Ic = 0,所以只用采集a相和b相的電流
通過clarke變換和park變換后可以得到Iq,Id,如下圖
為何要大費周章變換那么多次呢?就是為了得到Iq,Id呀,這可是一個直流量啊,符號代表了轉動方向,發現沒,Vq,Vd也是直流量,所以目的很簡單,就是為了用最經典的PID做閉環控制呀!
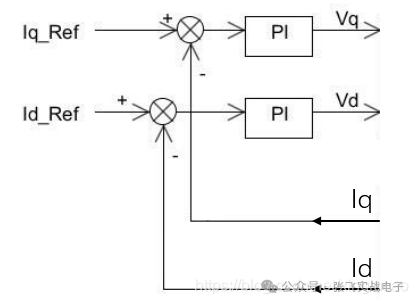
使用最經典的PI控制,將電壓跟隨電流的變化,從而實現電流閉環控制
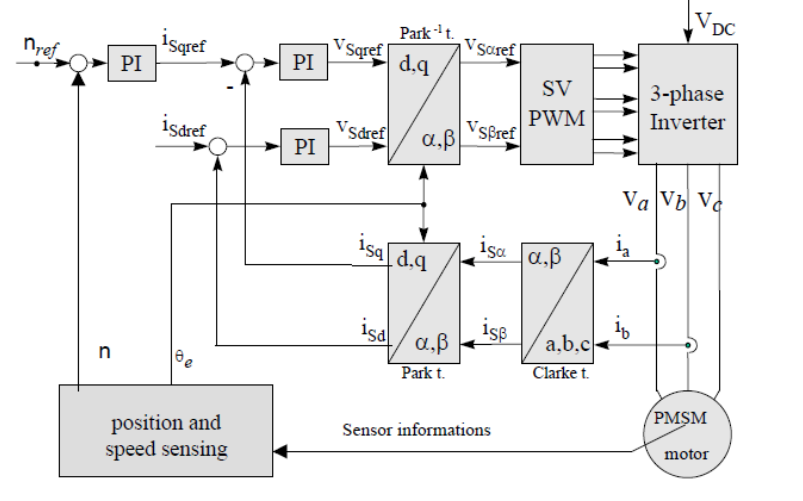
五、一般來講,電流壞是高速環,也一般作為無刷電機的內環,如果要實現速度閉環控制,那電流環就是內環,速度環就是外環,下面上一個總圖
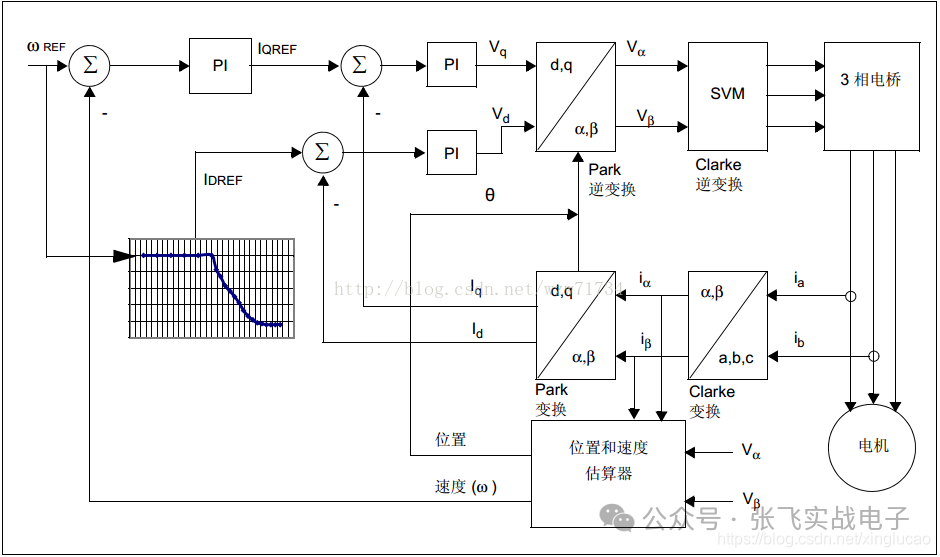
foc速度環+電流環總框圖
原文鏈接:https://blog.csdn.net/xinglucao/article/details/86534003
-
直流電機
+關注
關注
36文章
1733瀏覽量
71716 -
無刷電機
+關注
關注
60文章
890瀏覽量
47362 -
FOC控制
+關注
關注
0文章
50瀏覽量
3204
發布評論請先 登錄

其利天下技術·FOC控制和方波控制的區別?分別應用場景是什么?無刷電機驅動方案

無刷電機開發FOC方波
【硬聲推薦】電機FOC控制視頻合集
直流無刷電機FOC控制算法——理論

無刷電機FOC矢量控制入門知識
無刷電機Foc控制
其利天下技術·FOC控制和方波控制區別及分別應用場景·無刷電機驅動開發





 工商網監
工商網監
評論