 模擬人類觸覺神經!觸控傳感器讓人形機器人更像人
模擬人類觸覺神經!觸控傳感器讓人形機器人更像人
電子發燒友網報道(文/李彎彎)觸控傳感器是一種能夠檢測和響應人體或物體接觸的電子裝置,廣泛應用于智能手機、平板電腦、工業設備、汽車控制面板等領域。其核心功能是將物理接觸轉化為電信號,進而實現人機交互。
觸控傳感器通過感知物理接觸或接近動作,轉換為電信號。常見原理包括電容式、電阻式、紅外式、表面聲波(SAW)。電容式:利用人體電場干擾傳感器電極的電容變化。電阻式:通過按壓使兩層導電薄膜接觸,測量電壓變化。紅外式:發射紅外光網格,通過遮擋檢測接觸位置。表面聲波(SAW):利用超聲波在玻璃表面的傳播,接觸時反射波變化觸發信號。
人形機器人用觸控傳感器技術創新方向
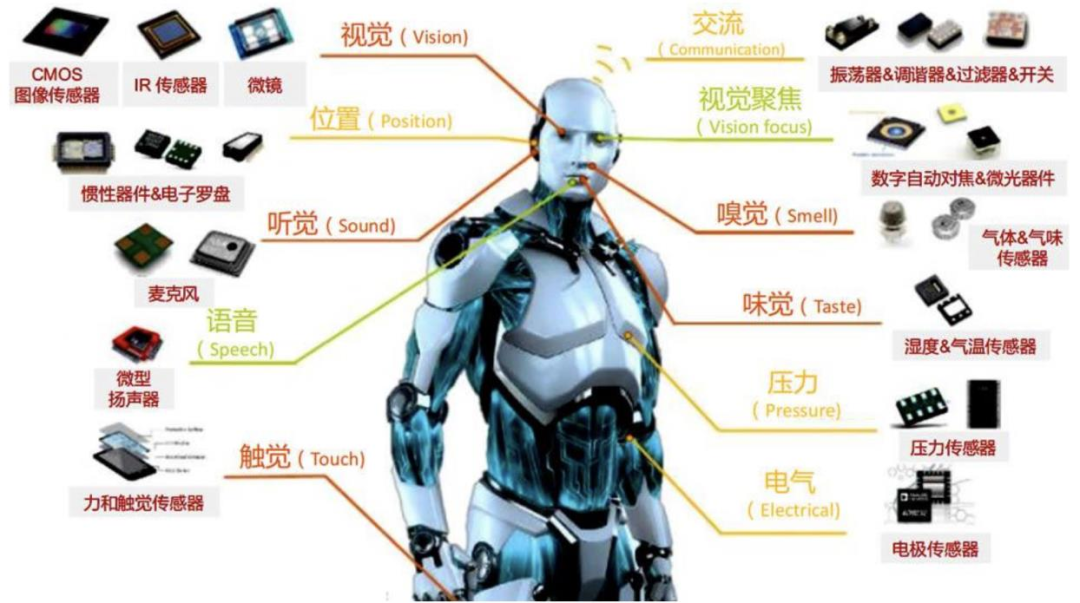
觸控傳感器在人形機器人中的應用是其實現智能交互、環境感知和安全控制的關鍵技術之一。通過集成多種觸控傳感器,機器人可以感知外界接觸、識別用戶意圖,并做出動態響應。
觸控傳感器在人形機器人中的應用場景有手部觸控、面部觸控、身體表面觸控、防生皮膚等。手部觸控:在機器人手掌或手指部位集成柔性電容式傳感器或壓阻式壓力傳感器,實現抓取物體時的力度反饋(如避免捏碎易碎品)或手勢交互(如彎曲手指觸發特定指令)。
面部觸控:在機器人面部(如眼睛或臉頰)安裝紅外或電容式傳感器,感知用戶觸摸以觸發交互(如輕拍頭部喚醒機器人)。
身體表面觸控:在機器人軀干、手臂等部位部署紅外網格傳感器或電容式陣列,實時檢測外部碰撞或意外接觸,觸發緊急停止或避讓動作。
仿生皮膚:覆蓋全身的柔性電子皮膚(集成電容、壓電或MEMS傳感器),模擬人類觸覺神經,感知溫度、壓力甚至紋理差異。
在人形機器人領域,觸控傳感器的技術創新是推動其智能化、柔性化和安全化的核心驅動力。行業從多個方向進行技術創新:其一,企業通過優化傳感器材料和制造工藝,實現高精度與高靈敏度的觸覺感知。例如,武漢華威科研發的靈巧手感知系統,指尖感應點面積僅1平方毫米,單手可集成1000個以上感應點,能夠精準感知克級到公斤級的力度變化。
其二,多模態融合感知,結合壓力、溫度、材質等多維物理信息,提升傳感器對環境的綜合感知能力。帕西尼感知科技的多維觸覺傳感器可進行壓感、摩擦等15種多維觸覺感知,實現全量程0.01N高精度測量。
其三,柔性電子皮膚與仿生設計,通過仿生設計模擬人類皮膚的觸覺反饋機制,使人形機器人在精密裝配、醫療護理等場景中具備媲美人類的觸覺能力。傳感器采用超薄柔性材料,可反復彎曲100萬次仍保持良好性能,適應人形機器人復雜動作的需求。
其四,分布式觸覺感知,在機器人手指、手掌等部位部署高密度感應點陣列,實現全覆蓋的觸覺感知。例如,帕西尼觸覺靈巧手DexH5搭載180個多維多陣列觸覺傳感器,能夠完成捏、抓、按、提、推等基礎動作,力控精度達0.01N。傳感器實時采集力反饋數據,并通過算法動態調整抓取力度,避免對物體造成損傷。
主要的觸控傳感器企業及產品優勢
人形機器人用觸控傳感器主要企業有千覺機器人、帕西尼感知科技、墨現科技、賽感科技、戴盟機器人。千覺機器人主要產品有高分辨率多模態觸覺傳感器、觸覺感知與控制智能化模組,以及觸覺仿真工具Xense_Sim。
千覺機器人自主研發的觸覺傳感器可提供包括高分辨率三維力覺、動覺、滑覺等在內的多模態觸覺感知信息,突破傳統觸覺傳感器僅能感受壓力分布以及空間分辨率不足的問題。自研多模態高精度觸覺傳感器G1-WS專為機器人夾爪設計,信息感受密度高達人類手指的800倍,能夠感知到細微的物體特征和變形。觸覺仿真工具Xense_Sim能精準模擬切向運動與力信息,解決了此前切向力模擬技術空白的問題,仿真數據更貼合擰瓶蓋、插拔接口等真實操作場景,有助于提升訓練模型的泛化能力。
帕西尼感知科技主要產品有ITPU多維觸覺傳感系統,包括ITPU多維觸覺芯片、四指靈巧手、微型視覺模組與數據驅動模型組成的軟硬件一體化方案。
能夠感知力覺、滑覺、溫度、材質等多個維度的信息,自主研發的ITPU多維觸覺傳感系統具有高精度和豐富的信息感知能力。采用“四指”靈巧手設計,在保證功能的同時降低成本,砍掉一根指頭成本直接降低20%。靈巧手在掌心內嵌攝像頭,通過“觸覺+視覺”融合,能有效避免因角度遮擋帶來的識別失誤,同時提升復雜操作的穩定性。
墨現科技是一家專注于柔性壓力傳感器研發與生產的科技企業,其核心產品和技術包括FLX系列柔性薄膜壓力傳感器、電子皮膚、觸覺傳感器解決方案。
FLX系列柔性薄膜壓力傳感器具有高可靠性、低觸發力度、大量程和低成本的特點。該系列傳感器可廣泛應用于智能家居、醫療健康、物聯網、消費電子、汽車電子、工業控制等領域。電子皮膚,由特殊的硅膠材質制作而成,具有優良的柔韌性和貼合度,能夠完美融入機器人的機械結構中,為機器人提供全方位的觸覺反饋。觸覺傳感器解決方案,為機器人提供高適應性的柔性壓力傳感器解決方案,已成功應用于普渡機器人等知名企業的產品中。
賽感科技主要研發和生產高性能柔性智能傳感器、電子皮膚等產品。這些產品具有高靈敏、大量程、快響應、高線性等特點,能夠廣泛應用于人形機器人、健康醫療、可穿戴設備等領域。
公司掌握了柔性傳感的核心技術,包括材料、結構、器件、系統等方面的全鏈條關鍵技術創新。其研發的離電式界面電容傳感器,通過接觸面積產生界面電容,能夠精準響應靜態力和動態力,突破了傳統傳感器高靈敏度和寬量程難以兼得的技術瓶頸。
戴盟機器人(Daimon Robotics)專注于觸覺感知與具身智能技術,主要產品有視觸覺傳感器(DM-Tac W、DM-Tac F)、視觸覺靈巧手(DM-Hand1、DM-Hand2)等。
DM-Tac W是全球首款多維高分辨率高頻率視觸覺傳感器,創新性地將攝像頭集成至傳感器內部,實現穩定魯棒的稠密觸覺感知能力。每平方厘米覆蓋4萬個感知單元,可捕捉物體接觸時的形貌、紋理、軟硬、滑移、按壓力、切向力等多種模態信息。
DM-Hand1,具有豐富的自由度,結合力位混合控制算法,可模擬人手實現精準的抓取操作。采用了戴盟全球首款毫米級厚度的視觸覺傳感器,微型化設計極大地降低了靈巧手的手指厚度,提高了機器人的靈活性和適應性。
小結:人形機器人觸控傳感器的技術創新正從單一功能向“仿生+智能”躍遷,未來3-5年,具備自學習能力、多模態感知和柔性適應性的觸覺系統將成為企業競爭的核心壁壘。觸控傳感器使人形機器人從“機械執行工具”向“擬人化交互伙伴”演進,未來隨著柔性電子、AI算法和邊緣計算的進步,觸覺感知將成為機器人智能化的重要標志。
-
人形機器人
+關注
關注
6文章
672瀏覽量
17406
發布評論請先 登錄
灝存科技:通過穿戴傳感器設備,隔空操控人形機器人
ST、漢威科技和紐迪瑞入局人形機器人,多家企業亮出關鍵傳感器

基于IMX219和IWR6843ISK的人形機器人毫米波雷達感應和傳感器融合

漢威科技柔性觸覺傳感器:為人形機器人裝上“中國觸覺”

洞察:人形機器人傳感器產業鏈概覽

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
這批中國企業,在做人形機器人觸覺傳感器
一文講透人形機器人常用的四類感知傳感器:視覺、力/力矩、觸覺、IMU
眾擎機器人發布全尺寸人形機器人SE01
觸覺傳感器的發展,對機器人產業有什么影響?

人形機器人感知變化的未來

人形機器人感知系統的特點:多模態感知、高精度、實時性
六維力傳感器——人形機器人的力覺






 工商網監
工商網監
評論