") 一文解析三相步進電機與兩相步進電機得差距在哪里
一文解析三相步進電機與兩相步進電機得差距在哪里

眾所周知,步進電機主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。所以本文小編主要介紹三相步進電機與兩相步進電機得差距在哪里,首先介紹的是它們之間的區(qū)別,其次闡述了三相步進電機與兩相步進電機步距角之間的差距,具體的跟隨小編來詳細了解一下。
三相步進電機與兩相步進電機的區(qū)別
1、電機的相數(shù)
是指電機內(nèi)部的線圈數(shù)不同,兩相步進電機電機內(nèi)部是由2個線圈組成,而三相步進電機內(nèi)部是由3個線圈。
2、電機的步距角
是指電機每走一步的角度,一般市面上二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°。
3、電機的尺寸
三相的電機一般是大電機,所以尺寸方面一般會比兩相的電機大,這也決定了三相步進電機比兩相的運行起來平穩(wěn)性更好。
4、力矩
二相的電機的力矩相同尺寸會比三相的力矩稍微大些。
5、精度
兩相步進電機驅(qū)動器的細分功能越來越強大,兩相的同樣可以達到三相所能達到的精度。
三相步進電機的高速性能好(特性較硬),要比兩相步進電機的步距角小,精度更好。由于扭力隨速度升高下降得較慢,所以通常用于精度要求高的場合。
三相步進電機與兩相步進電機步距角詳解
1、決定步距角的因素
步進電機分辨率(一圈的步數(shù),360°除以步距角)越高,位置精度越高。為了得到高分辨率,設(shè)計的極數(shù)要多。PM型轉(zhuǎn)子為N與S極在轉(zhuǎn)子的鐵心外表面上交互等節(jié)距放置,轉(zhuǎn)子極數(shù)為N極與S極數(shù)之和,為簡化講解,假設(shè)極對數(shù)為1。此處確定轉(zhuǎn)子為永久磁鐵的步進電機的步距角θs由下式表示,其中Nr為轉(zhuǎn)子極對數(shù),P為定子相數(shù),(本課后面敘述的HB型步進電機Nr為轉(zhuǎn)子齒數(shù)):
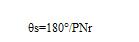
上式的物理含義如下:
轉(zhuǎn)子旋轉(zhuǎn)一周的機械角度為360。,如用極數(shù)2Nr去除,相當(dāng)于一個極所占的機械角度即180°/Nr。這就是說,一個極的機械角度用定子相數(shù)去分割就得到步距角,此概念如下圖所示。
由式θs=180°/PNr可知,步距角越小,分辨率越高,因此要提高步進電機的分辨率,就要增加轉(zhuǎn)子極對數(shù)或采用定子相數(shù)P較多的多相式方法。而Nr的增加受到機械加工的限制,所以要制造高分辨率的步進電機需要兩種方法并用才行。
2、兩相步進電機
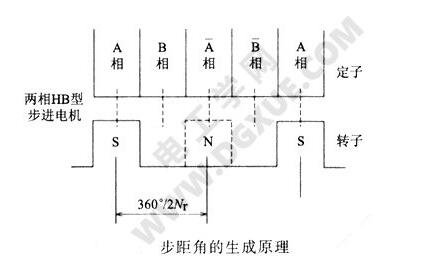
兩相步進電機最簡單的構(gòu)成為Nr=1的情況,電機結(jié)構(gòu)如下圖所示。一般兩相電機定子磁極數(shù)為4的倍數(shù),至少是4。轉(zhuǎn)子為N極與S 極各一個的兩極轉(zhuǎn)子。
定子一般用硅鋼片疊壓制作,定子磁極數(shù)為4極,相當(dāng)于一相繞組占兩個極,A相兩個極在空間相差180°,B相兩個極在空間也相差180°。電流在一相繞組內(nèi)正負流動(此種驅(qū)動方式稱為雙極性驅(qū)動),A相與B相電流的相位相差90°,兩相繞組中矩形波電流交替流過。
即兩相電機的定子,在Nr=1時,空間相差90°,時間上電流相差90°相位差,電流與普通的同步電機相似,在定子上產(chǎn)生旋轉(zhuǎn)磁場,轉(zhuǎn)子被旋轉(zhuǎn)磁場吸引,隨旋轉(zhuǎn)磁場同步旋轉(zhuǎn)。
上圖表示兩相步進電機的結(jié)構(gòu)(PM型)及其運行原理,從圖(a)到圖(b)順時針旋轉(zhuǎn)90°,依次圖(c)、(d)均旋轉(zhuǎn)90°,依次不斷運轉(zhuǎn)成為連續(xù)旋轉(zhuǎn)。
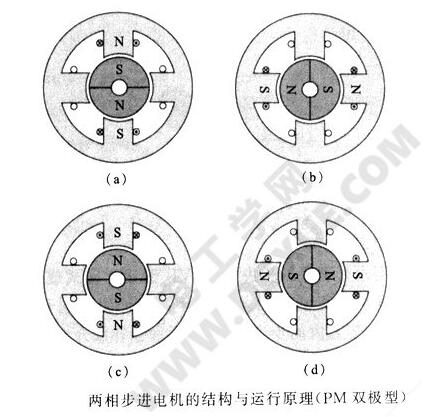
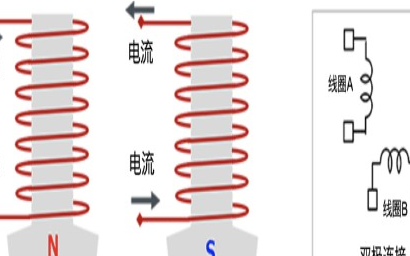
以上圖為例,假如A相有兩個線圈,單向電流交替流過兩個線圈,也可產(chǎn)生相反的磁通方向,此方式稱為單極(uni-plar)型線圈。
如下圖所示線圈內(nèi)部只流過單方向電流,此線圈稱為單極型線圈;另一種,線圈內(nèi)流過正、反方向電流的線圈稱為雙極型線圈,兩種線圈的優(yōu)缺點將在后面的課程中詳細介紹。單極型線圈可以取代上圖所示雙極型線圈,運行時具有相同的步距角。
上圖中的兩相單極型線圈在有些文獻中也被稱為四相步進電機,此時其轉(zhuǎn)子極對數(shù)、齒數(shù)Nr,以及步距角θs均與雙極型線圈相同。本課程兩相電機的定義符合式θs=180°/PNr,即將轉(zhuǎn)子齒數(shù)和步距角θs代入式θs=180°/PNr,如P=2,則為兩相電機,如Nr相同,P=4,步距角θs只有1/2,則電機為四相電機,在此特別提請注意。
兩相步進電機現(xiàn)在應(yīng)用廣泛,實際電機的構(gòu)造比圖(PM雙極型兩相步進電機結(jié)構(gòu)與運行原理)復(fù)雜,定子除采用疊片外,還有爪極結(jié)構(gòu),但基本原理可參考圖(PM雙極型兩相步進電機結(jié)構(gòu)與運行原理),圖中所示的轉(zhuǎn)子被稱為PM型(永久磁鐵或永磁式)轉(zhuǎn)子,磁性圓柱的外表面形成轉(zhuǎn)子磁極。
3、三相步進電機
轉(zhuǎn)子不采用永久磁鐵的步進電機(VR型或反應(yīng)式或變磁阻式)很早就在三相步進電機上得到應(yīng)用。1986年日本伺服公司開發(fā)了轉(zhuǎn)子為永久磁鐵、定子磁極帶有齒的步進電機(在后面會詳細介紹磁極齒的設(shè)計原理),定、轉(zhuǎn)子齒距的配合,可以得到更高的角分辨率和轉(zhuǎn)矩。三相步進電機定子線圈的主極數(shù)為三的倍數(shù),故三相步進電機的定子主極數(shù)為3、6、9、12 等。
轉(zhuǎn)子不采用永久磁鐵的步進電機(VR型或反應(yīng)式或變磁阻式)很早就在三相步進電機上得到應(yīng)用。1986年日本伺服公司開發(fā)了轉(zhuǎn)子為永久磁鐵、定子磁極帶有齒的步進電機(在后面會詳細介紹磁極齒的設(shè)計原理),定、轉(zhuǎn)子齒距的配合,可以得到更高的角分辨率和轉(zhuǎn)矩。三相步進電機定子線圈的主極數(shù)為三的倍數(shù),故三相步進電機的定子主極數(shù)為3、6、9、12 等。
下圖為不同相數(shù)的步進電機典型定子結(jié)構(gòu)和驅(qū)動電路的比較,其中忽略了轉(zhuǎn)子結(jié)構(gòu)圖。假設(shè)轉(zhuǎn)子均為PM型或HB型,并且依據(jù)定子為兩相、三相、五相等配備相應(yīng)的轉(zhuǎn)子。定子采用不產(chǎn)生不平衡電磁力(在后面會詳細介紹,轉(zhuǎn)子徑向吸引力的和不能完全互相抵消,產(chǎn)生剩余徑向力)的最小主極數(shù)結(jié)構(gòu),即兩相為4個主極、三相為3個主極、五相為5個主極時,結(jié)構(gòu)上會產(chǎn)生不平衡電磁力,除特殊用途外不會使用上述結(jié)構(gòu)。圖中,定子的結(jié)構(gòu)為兩相為8個主極、三相為6個主極、五相為10個主極,為最簡單的結(jié)構(gòu)。
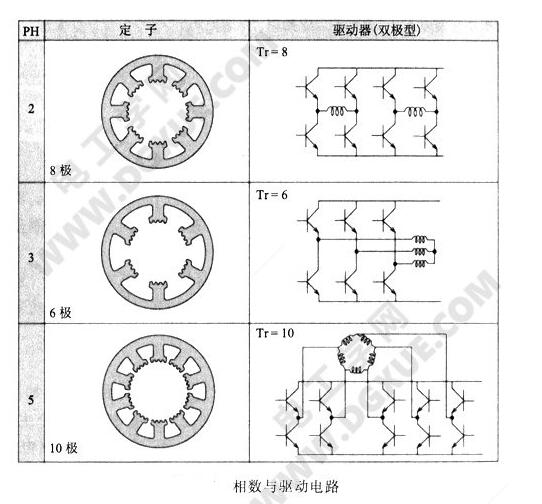
另一方面,如雙極型(Bi-polar)線圈所使用的步進電機驅(qū)動電路,其功率管數(shù),兩相為8個、五相為10個,三相則由于繞組采用Y或△接法的關(guān)系,3個出線口的驅(qū)動只用6個功率管就夠了,所以從電機和驅(qū)動器一體考慮,三相步進電機結(jié)構(gòu)最簡單,其兩者的制造成本最低。
從定子相數(shù)的奇偶數(shù)來看,奇數(shù)情況下驅(qū)動電路中切換功率管的數(shù)量要比偶數(shù)情況下少,例如三相步進電機要比兩相步進電機的驅(qū)動功率管數(shù)少。三相的驅(qū)動IC現(xiàn)在三權(quán)電氣公司、三洋電機公司、新電元工業(yè)公司等生產(chǎn)企業(yè)已經(jīng)有售。三相步進電機與兩相步進電機比較,在相同的轉(zhuǎn)子齒數(shù)時,具有提高1.5倍分辨率、振動低等優(yōu)點,所以使用數(shù)量會增加,價格會降低,希望其能成為一款系列化步進電機,其性能將在后面詳細介紹。
有關(guān)三相永磁式步進電機,除本課程外,以前還沒有系統(tǒng)介紹的文獻, 本課程將詳細介紹三相HB型步進電機(42mm及60mm),其驅(qū)動器的外形如下圖所示。
-
步進電機
+關(guān)注
關(guān)注
152文章
3165瀏覽量
149717
發(fā)布評論請先 登錄
步進電機定子相數(shù):單相/兩相/三相/四相/五相結(jié)構(gòu)工作原理 相關(guān)資料推薦
二相步進電機和三相步進電機有什么區(qū)別?相關(guān)資料推薦
基于FPGA的兩相步進電機細分驅(qū)動電路設(shè)計
兩相步進電機和五相步進電機有什么區(qū)別
兩相雙極步進電機的驅(qū)動 其1






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論