") 單一步進(jìn)電機(jī)實(shí)現(xiàn)工件搬運(yùn)與尺寸檢測(cè)融合系統(tǒng)
單一步進(jìn)電機(jī)實(shí)現(xiàn)工件搬運(yùn)與尺寸檢測(cè)融合系統(tǒng)
一、技術(shù)背景與核心創(chuàng)新?
在現(xiàn)代智能制造系統(tǒng)中,傳統(tǒng)自動(dòng)化產(chǎn)線面臨一個(gè)普遍存在的技術(shù)痛點(diǎn):工件搬運(yùn)與尺寸檢測(cè)通常需要分離的子系統(tǒng)完成。這種分離不僅增加了設(shè)備復(fù)雜性和成本,更在系統(tǒng)集成與數(shù)據(jù)協(xié)同方面帶來(lái)諸多挑戰(zhàn)。當(dāng)工件完成夾持后,必須通過(guò)額外的傳感器(如視覺(jué)系統(tǒng)、激光測(cè)距或壓力傳感器)進(jìn)行尺寸測(cè)量,導(dǎo)致處理流程延長(zhǎng)、設(shè)備體積增大以及故障點(diǎn)增多。而基于TMC5130芯片的StallGuard2技術(shù)提出的融合解決方案,通過(guò)單一步進(jìn)電機(jī)系統(tǒng)同時(shí)實(shí)現(xiàn)搬運(yùn)與尺寸檢測(cè)功能,開(kāi)創(chuàng)性地解決了這一技術(shù)難題。
這種技術(shù)融合帶來(lái)的直接效益體現(xiàn)在三個(gè)方面:首先,在設(shè)備成本上,省去了傳統(tǒng)檢測(cè)所需的傳感器及配套電路,降低了30%以上的硬件成本;其次,在系統(tǒng)可靠性方面,減少了連接線纜和接口數(shù)量,顯著降低了故障率;最后,在響應(yīng)速度上,使檢測(cè)過(guò)程完全融入搬運(yùn)動(dòng)作的自然時(shí)序中,無(wú)需額外停頓。這種“檢測(cè)即運(yùn)動(dòng)、運(yùn)動(dòng)即檢測(cè)”的理念,代表了工業(yè)自動(dòng)化向多功能集成化發(fā)展的新趨勢(shì)。
二、 系統(tǒng)硬件架構(gòu)與工作流程
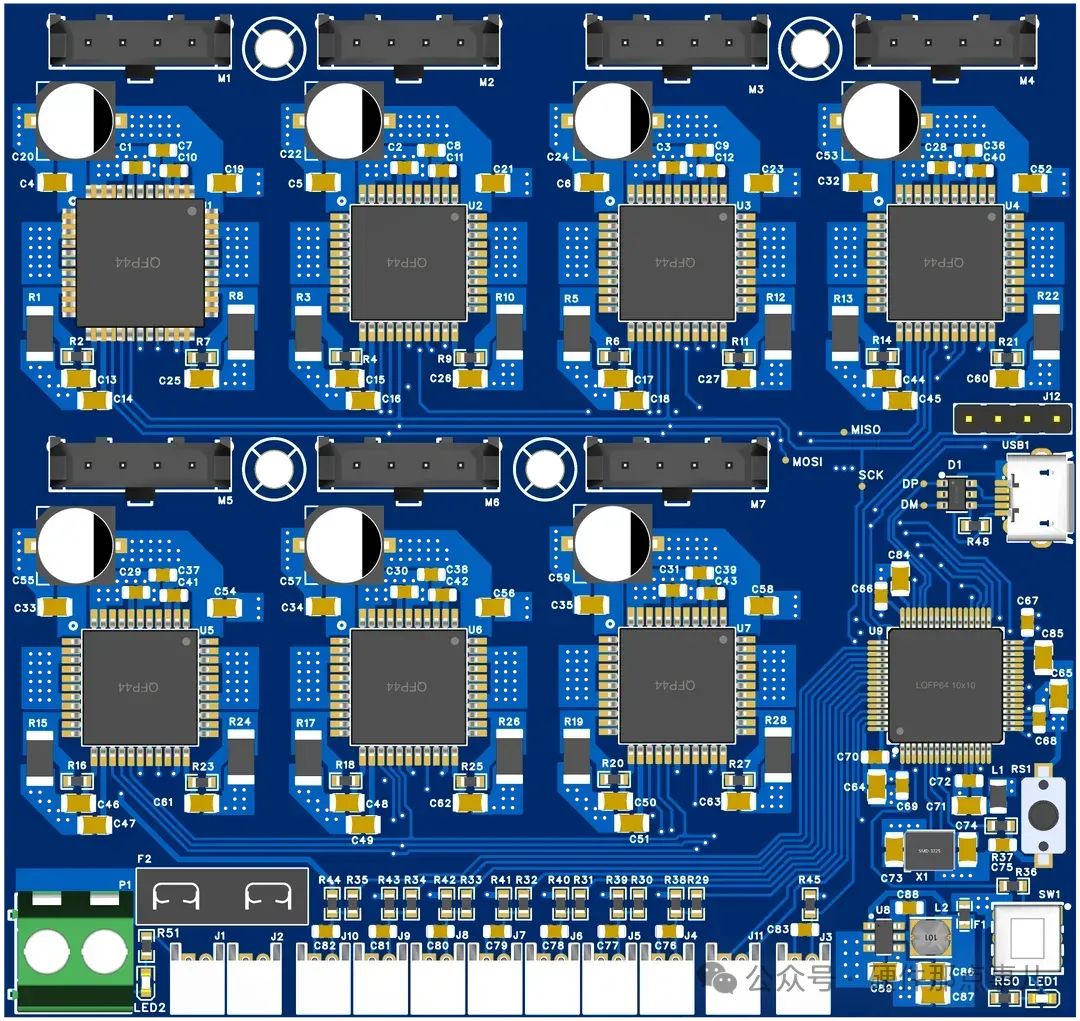
該系統(tǒng)的硬件架構(gòu)圍繞TMC5130芯片的能力進(jìn)行優(yōu)化設(shè)計(jì),實(shí)現(xiàn)了機(jī)電一體化的高效整合: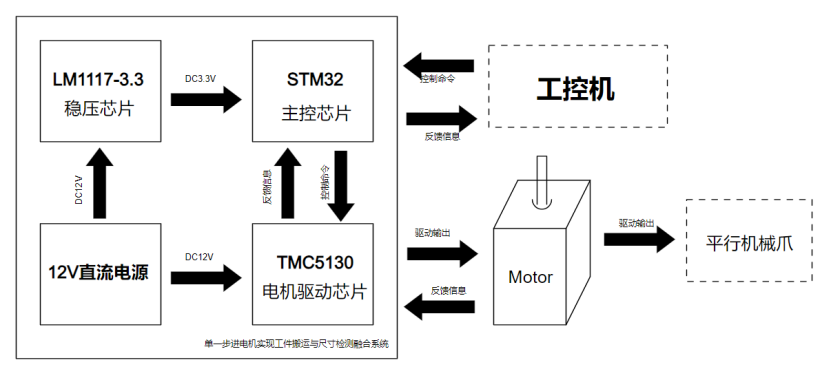
整個(gè)系統(tǒng)采用12V直流電源供電,經(jīng)LM1117-3.3芯片穩(wěn)壓成3.3V給主控芯片供電,主控芯片負(fù)責(zé)運(yùn)算處理,接收到工控機(jī)的指令,經(jīng)運(yùn)算后控制TMC5130電機(jī)驅(qū)動(dòng)芯片輸出驅(qū)動(dòng)信號(hào),控制步進(jìn)電機(jī)運(yùn)動(dòng),帶動(dòng)平行機(jī)械爪,抓取工件,并放置在指定位置,同時(shí)檢測(cè)工件尺寸大小,傳回工控機(jī)。
三、核心原理
機(jī)械爪從零點(diǎn)開(kāi)始做抓夾運(yùn)動(dòng),此時(shí)主控芯片開(kāi)始記錄電機(jī)走的步數(shù),當(dāng)電機(jī)堵轉(zhuǎn)時(shí),截至記錄,通過(guò)電機(jī)走的步數(shù)反推工件外形尺寸。
那么怎么檢測(cè)堵轉(zhuǎn)呢?答案是根據(jù)反電動(dòng)勢(shì)。
檢測(cè)[]()反電動(dòng)勢(shì)和繞組電流之間的相位差,來(lái)反推施加在電機(jī)上的負(fù)載大小,左圖是沒(méi)有夾到工件時(shí)的波形,相位差為65.26°,右圖為夾到工件時(shí),相位差為40.16°。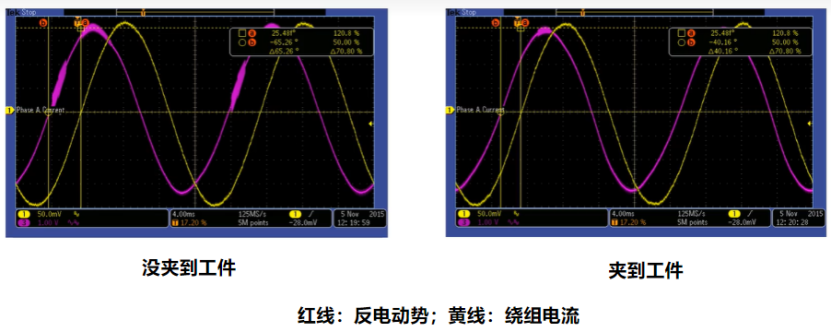
通過(guò)檢測(cè)電流為零時(shí)反電動(dòng)勢(shì)值的不同,也可以進(jìn)一步確定電機(jī)上的負(fù)載大小。從下圖可以看出當(dāng)剛夾到工件比沒(méi)有夾到工件時(shí)反電動(dòng)勢(shì)震蕩周期更快,當(dāng)繼續(xù)夾緊至電機(jī)堵轉(zhuǎn),可以看到反電動(dòng)勢(shì)趨于0V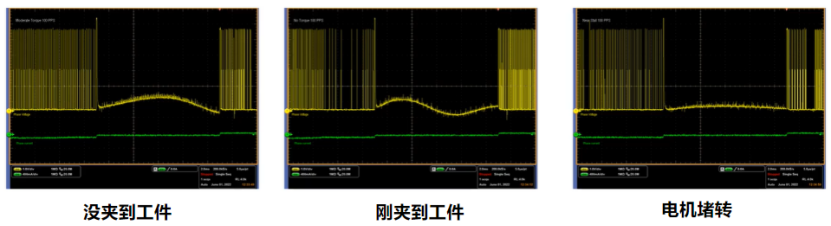
TMC5130內(nèi)置的StallGuard2堵轉(zhuǎn)檢測(cè)技術(shù),就是采用檢測(cè)反電動(dòng)勢(shì)和繞組電流之間的相位差這一方法,通過(guò)分析電機(jī)相電流的變化來(lái)評(píng)估電機(jī)的負(fù)載狀態(tài)和機(jī)械阻力。通過(guò)測(cè)量電機(jī)在不同負(fù)載條件下的電流響應(yīng),從而判斷電機(jī)是否發(fā)生堵轉(zhuǎn)。具體來(lái)說(shuō),StallGuard2的測(cè)量值(SG_RESULT)在負(fù)載、速度和電流設(shè)置范圍內(nèi)線性變化,當(dāng)負(fù)載最大時(shí),SG_RESULT接近零,此時(shí)電機(jī)處于最節(jié)能的運(yùn)行狀態(tài)。(下圖為T(mén)MC5130的應(yīng)用圖,紅框位置為芯片內(nèi)置的電流負(fù)反饋環(huán)路)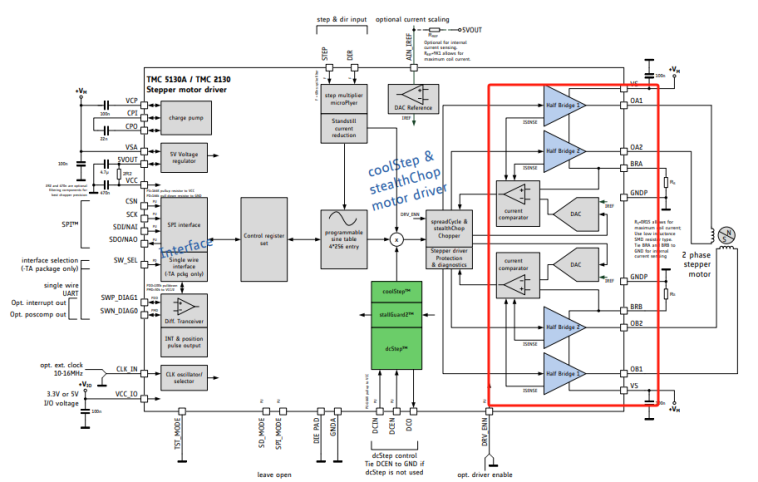
四、關(guān)鍵寄存器配置
IHOLD_IRUN 0X10 電流寄存器
設(shè)置合適的電流,設(shè)置電流大小直接影響電機(jī)的負(fù)載能力。設(shè)定電流改變后sgt值也需要調(diào)節(jié)。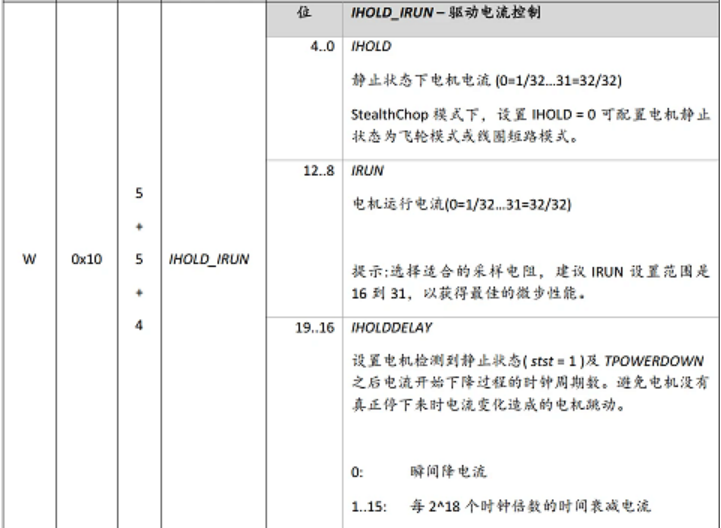
VMAX 0X27 最高速度
使用StallGuard2的最佳工作速度范圍在10-300PRM,不同的電機(jī)速度有所區(qū)別。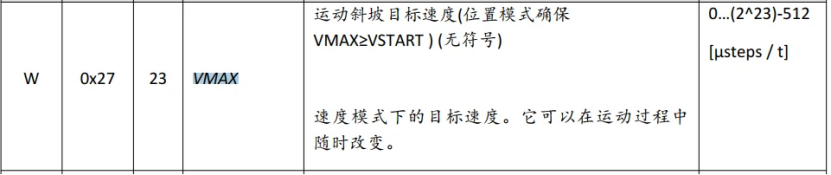
SW_MODE 0X34 sg_stop 10bit- 1:啟用STALLGUARD 2功能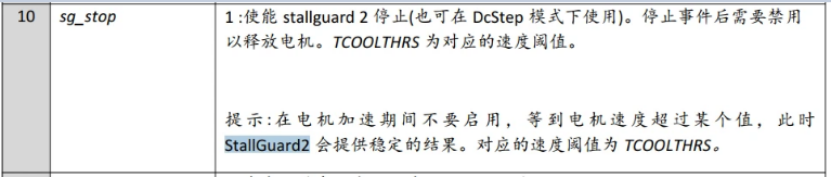
COOLCONF 0x6D: 16bit-22bit StallGuard2 閾值用于設(shè)置靈敏度;24bit-標(biāo)準(zhǔn)/濾波模式。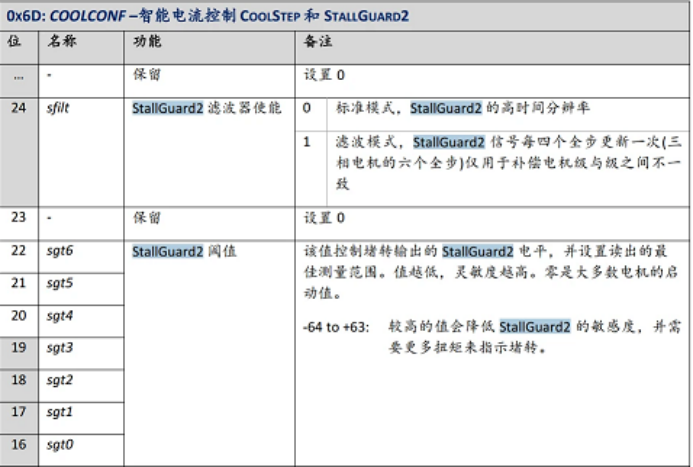
TCOOLTHRS 0X14:使能CoolStep和StallGuard2功能的下限速度,到達(dá)此值電機(jī)停止并保持。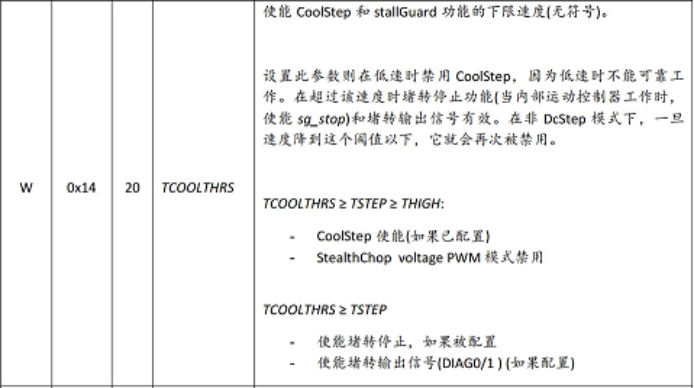
DRV_STATUS 0X6F: StallGuard2值和驅(qū)動(dòng)錯(cuò)誤標(biāo)志0-9bit SG_RESULT(負(fù)載值) 用于監(jiān)測(cè)電機(jī)所剩的扭力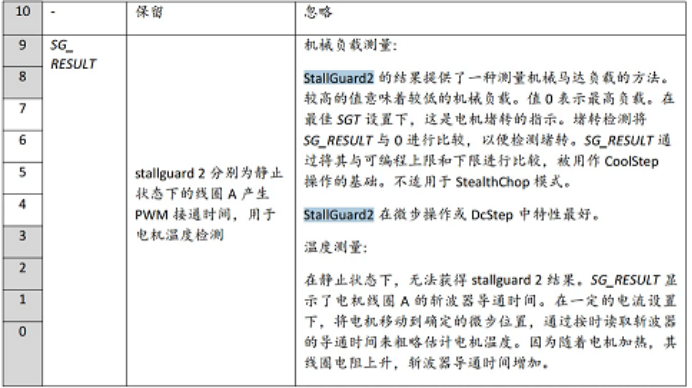
五、 工件尺寸檢測(cè)算法實(shí)現(xiàn)
將StallGuard2的堵轉(zhuǎn)信號(hào)轉(zhuǎn)化為精確尺寸信息,需要建立嚴(yán)謹(jǐn)?shù)臄?shù)學(xué)模型。核心在于利用機(jī)械爪與堵轉(zhuǎn)位置的映射關(guān)系:
實(shí)際尺寸 = (堵轉(zhuǎn)位置 - 基準(zhǔn)位置) × 絲桿導(dǎo)程 / 微步數(shù)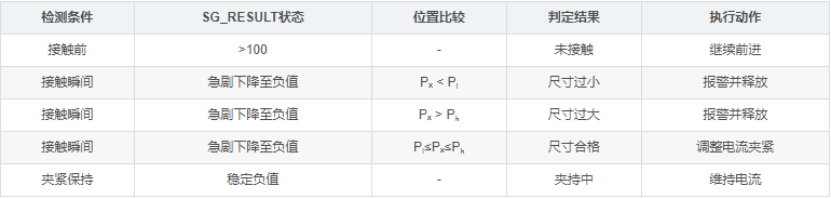
六、實(shí)際測(cè)試
1、電機(jī)驅(qū)動(dòng)芯片寄存器配置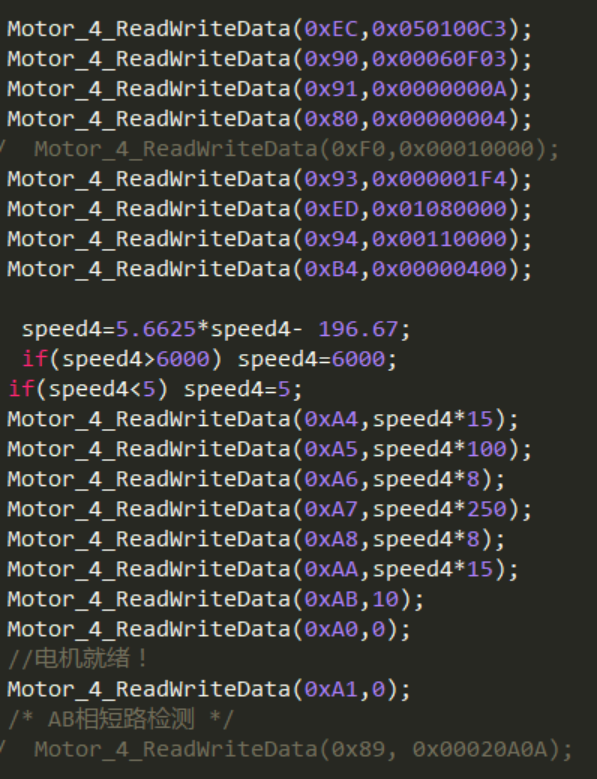
2、電機(jī)參數(shù)
3、示波器波形讀取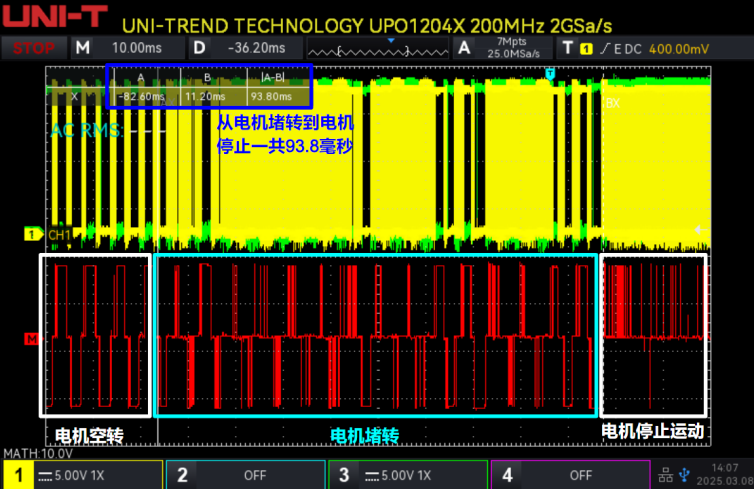
紅色為電機(jī)A線圈上的激勵(lì)電壓信號(hào),從圖中可得本系統(tǒng)可在0.1秒內(nèi)完成工件尺寸檢測(cè)。
七、總結(jié)
這種融合方案代表著工業(yè)自動(dòng)化向__多功能集成化__發(fā)展的必然趨勢(shì)。隨著TMC5130等智能驅(qū)動(dòng)芯片的普及,未來(lái)我們有望看到更多“硬件簡(jiǎn)化、軟件強(qiáng)化”的創(chuàng)新應(yīng)用,推動(dòng)制造業(yè)在柔性化、智能化、低成本化方向持續(xù)突破。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2564文章
52722瀏覽量
764691 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3162瀏覽量
149302 -
自動(dòng)化
+關(guān)注
關(guān)注
29文章
5754瀏覽量
82302
發(fā)布評(píng)論請(qǐng)先 登錄
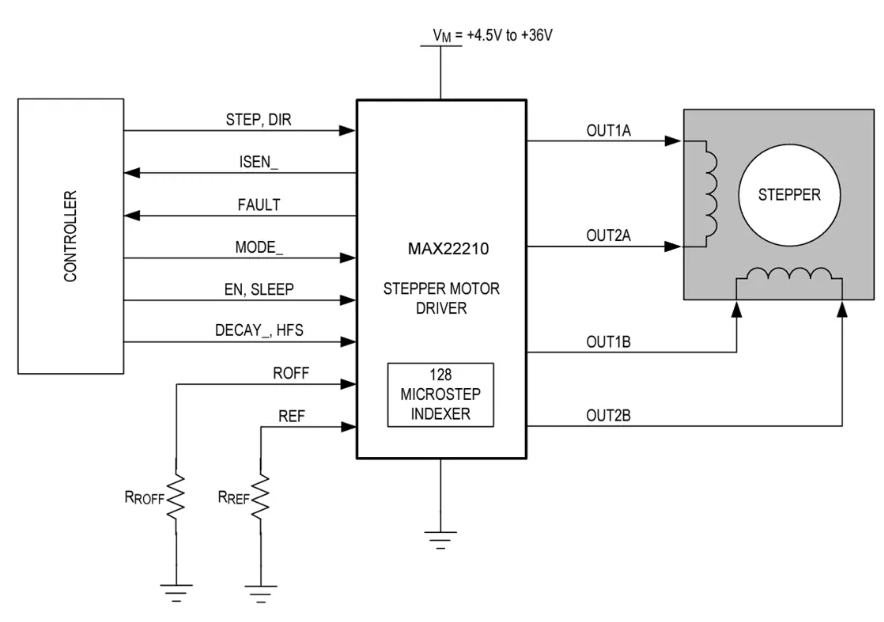
Analog Devices / Maxim Integrated MAX22210步進(jìn)電機(jī)驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)
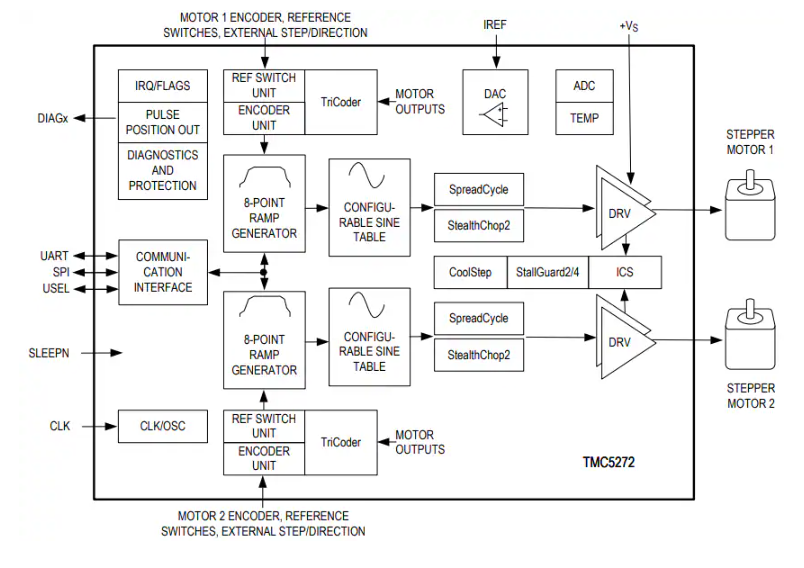
ADI Trinamic TMC5272步進(jìn)電機(jī)控制器數(shù)據(jù)手冊(cè)
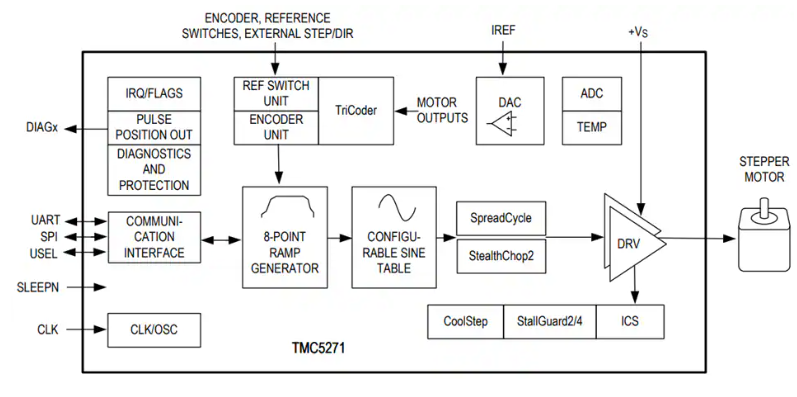
ADI Trinamic TMC5271步進(jìn)電機(jī)控制器數(shù)據(jù)手冊(cè)
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
想讓步進(jìn)電機(jī)控制更順滑?微步控制優(yōu)勢(shì)與挑戰(zhàn)全揭秘

想讓步進(jìn)電機(jī)控制更順滑?微步控制優(yōu)勢(shì)與挑戰(zhàn)全揭秘!
案例分析,搬運(yùn)機(jī)械手如何選擇電機(jī)?

步進(jìn)電機(jī)的控制實(shí)現(xiàn)方法

基于STM32F405RGT6的TMC2660步進(jìn)電機(jī)驅(qū)動(dòng)器,附帶原理圖+PCB
步進(jìn)電機(jī)轉(zhuǎn)速怎么控制高低
步進(jìn)電機(jī)的優(yōu)缺點(diǎn)和適用范圍是什么
51步進(jìn)電機(jī)仿真程序
步進(jìn)電機(jī)伺服控制系統(tǒng)的作用
TB62214FG/FTG兩相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器英文手冊(cè)
步進(jìn)電機(jī)失步可能因素






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論