") 具備光照魯棒和自適應(yīng)特征剔除的VSLAM前端框架
具備光照魯棒和自適應(yīng)特征剔除的VSLAM前端框架

現(xiàn)有的基于特征的VSLAM系統(tǒng)依賴于固定的前端參數(shù),這使得它們在面對光照突變時顯得十分脆弱,且特征跟蹤也不穩(wěn)定。為應(yīng)對這些挑戰(zhàn),我們提出了“IRAF-SLAM”,這是一種具備光照魯棒性且能自適應(yīng)特征篩選的前端設(shè)計,旨在提升VSLAM在復(fù)雜且具有挑戰(zhàn)性環(huán)境中的抗干擾能力。
? 文章:
IRAF-SLAM: An Illumination-Robust and Adaptive Feature-Culling Front-End for Visual SLAM in Challenging Environments
? 作者:
Thanh Nguyen Canh, Bao Nguyen Quoc, Haolan Zhang, Bupesh Rethinam Veeraiah, Xiem HoangVan, Nak Young Chong
? 論文鏈接:
https://arxiv.org/abs/2507.07752
? 編譯:
INDEMIND
01本文核心內(nèi)容
盡管在VSLAM算法方面取得了重大進展,包括諸如ORB-SLAM和VINS-Mono等標志性系統(tǒng),但在各種現(xiàn)實條件下實現(xiàn)穩(wěn)健性能仍是一個未解決的難題。
限制VSLAM穩(wěn)健性能的關(guān)鍵因素是對環(huán)境變化的敏感性,尤其是動態(tài)光照。現(xiàn)實場景中經(jīng)常出現(xiàn)具有挑戰(zhàn)性的光照條件,如陰影、過曝、低光環(huán)境以及由人工或自然光源引起的突然光照變化。這些變化嚴重影響基于特征的SLAM系統(tǒng),因為這些系統(tǒng)依賴于一致的關(guān)鍵點檢測和描述符匹配。固定參數(shù)的前端無法適應(yīng)這些變化,導(dǎo)致特征重復(fù)性降低、頻繁跟蹤失敗以及定位漂移增加。
諸如LSD-SLAM、DSO和SVO這類直接法假定光度恒定,這使得它們在面對光照變化時容易受到影響。為緩解此類問題,近期的研究工作涵蓋了圖像預(yù)處理技術(shù)以及基于深度學習的光照增強方法。然而,這類方法通常會帶來巨大的計算開銷,需要大規(guī)模的訓練數(shù)據(jù)集,并且在不同環(huán)境中難以實現(xiàn)泛化。
基于特征的SLAM系統(tǒng),包括MonoSLAM、PTAM以及ORB-SLAM系列,通常在其特征提取流程中采用靜態(tài)閾值,依賴于諸如FAST的檢測器以及BRIEF或ORB這樣的描述符。這種靜態(tài)設(shè)計限制了其在動態(tài)光照場景中的適應(yīng)性。近期的研究提出了自適應(yīng)低光增強方法以提升前端性能,而諸如[Afe-orb-slam],則通過圖像增強和自適應(yīng)閾值改進了ORB特征提取。然而,這些方法仍缺少針對特征可靠性的系統(tǒng)性評估。
為了解決這些局限性,我們提出了IRAF-SLAM,這是一種基于ORB-SLAM3構(gòu)建的光照魯棒且自適應(yīng)特征剔除前端框架,旨在增強VSLAM在具有挑戰(zhàn)性的光照條件下的魯棒性。IRAF-SLAM集成了三個關(guān)鍵組件:
(1)構(gòu)建一套圖像增強流程,綜合運用高斯濾波、自適應(yīng)伽馬校正以及反銳化掩蔽技術(shù),旨在改善不同光照條件下圖像的視覺質(zhì)量,提升特征的可辨識度。
(2)設(shè)計一種自適應(yīng)的 FAST 閾值設(shè)定機制,該機制能夠基于圖像內(nèi)部的梯度變化以及子區(qū)域的熵分析結(jié)果,動態(tài)地對特征檢測的靈敏度進行調(diào)整。
(3)提出一種特征篩選策略,通過對特征點的密度分布進行評估,并引入光照影響因子,以此來衡量特征點的穩(wěn)定性,進而在進行姿態(tài)估計之前,有效地剔除不可靠的關(guān)鍵點。此框架能夠有效緩解在惡劣光照環(huán)境下特征提取失效的問題,在不顯著增加計算負擔的前提下,增強系統(tǒng)跟蹤的魯棒性以及定位的精確性 。
我們將所提出的方法集成到ORB-SLAM3中。并且在TUM-VI和EuRoC數(shù)據(jù)集上進行了廣泛的評估,結(jié)果表明與最先進的VSLAM系統(tǒng)相比,在跟蹤穩(wěn)定性和軌跡精度方面有了顯著的提升。
02方法原理
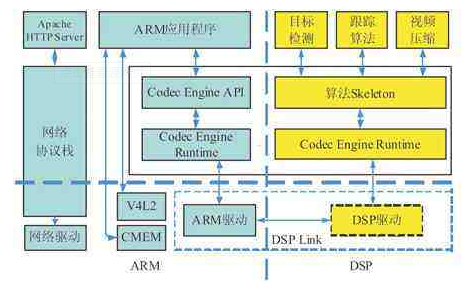
IRAF-SLAM的架構(gòu)如圖1所示。
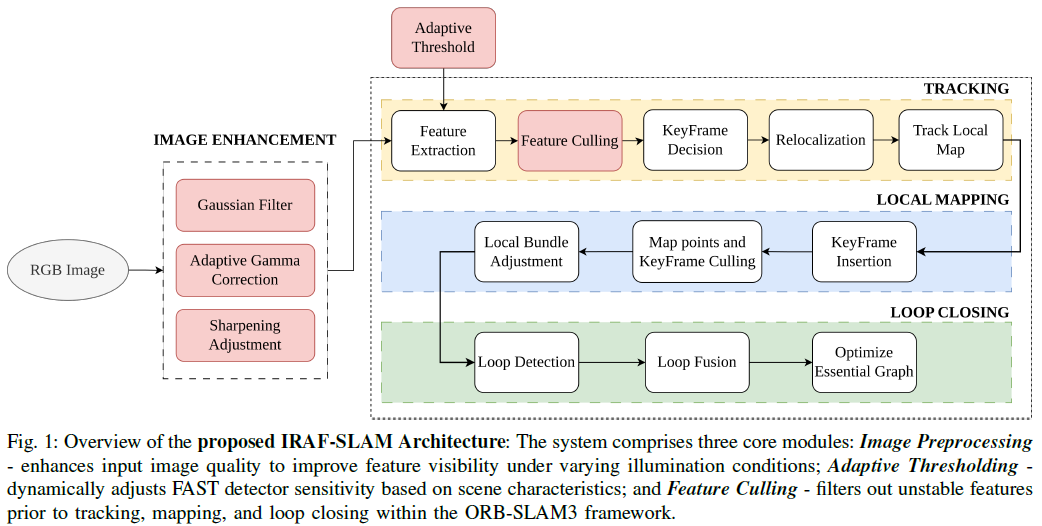
該框架在標準 ORB - SLAM3 流程的基礎(chǔ)上,融入了三個輕量級卻高效的模塊,旨在提升系統(tǒng)在光照條件復(fù)雜的環(huán)境中的魯棒性。
整個處理流程始于圖像預(yù)處理階段。在這一階段,通過高斯濾波、自適應(yīng)伽馬校正以及銳化調(diào)整等操作,改善圖像的視覺質(zhì)量。經(jīng)過增強處理后的圖像隨后進入特征提取環(huán)節(jié)。在此過程中,一種自適應(yīng)閾值機制會依據(jù)圖像的全局統(tǒng)計特性以及局部變化情況,動態(tài)調(diào)整 FAST 檢測器的敏感度。
完成特征提取后,系統(tǒng)會采用一種特征篩選策略,對所檢測到的關(guān)鍵點的可靠性進行評估。在將數(shù)據(jù)傳輸至標準 ORB - SLAM3 的跟蹤、局部建圖以及閉環(huán)檢測模塊之前,會舍棄那些被判定為不穩(wěn)定的關(guān)鍵點。
03實驗結(jié)果
A.實驗環(huán)境
為了評估所提出的RAF-SLAM系統(tǒng)的有效性和魯棒性,我們在一臺運行Ubuntu20.04操作系統(tǒng)的工作站上進行了實驗,該工作站配備了英特爾酷睿i7-13700KF處理器和32GB內(nèi)存。
我們選擇了兩個廣泛使用的基準數(shù)據(jù)集進行驗證:
TUM-VI數(shù)據(jù)集,該數(shù)據(jù)集提供了在各種室內(nèi)和室外環(huán)境中,在具有挑戰(zhàn)性的光照和運動條件下同步錄制的立體圖像和慣性測量單元(IMU)測量值;
EuRoC(MAV)數(shù)據(jù)集,該數(shù)據(jù)集包含了由配備立體相機和IMU傳感器的微型飛行器在大型機械廳和Vicon動作捕捉室中捕獲的序列。EuRoC序列按難度級別分類——簡單、中等和困難,并且存在諸如低紋理、運動模糊和突然的光照變化等挑戰(zhàn)。所有序列均以單目模式處理,以專門評估我們前端增強功能在不利視覺條件下的性能。
B.特征提取評估
為評估所提出的圖像增強和自適應(yīng)閾值模塊的有效性,我們在具有挑戰(zhàn)性的光照條件下對特征提取和匹配性能進行了詳細分析。
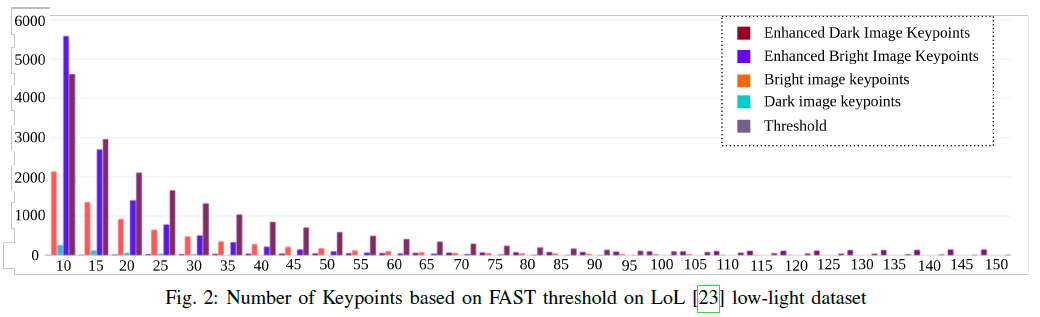
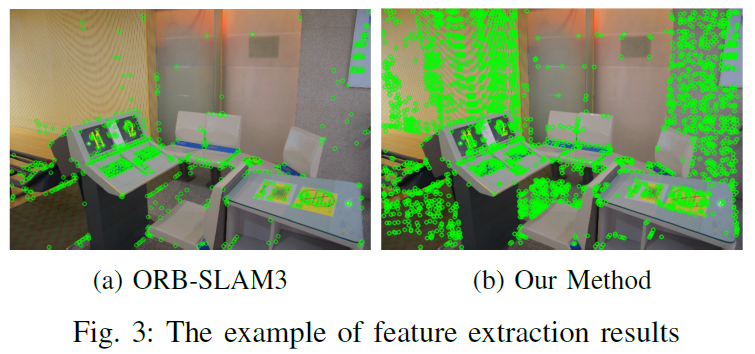
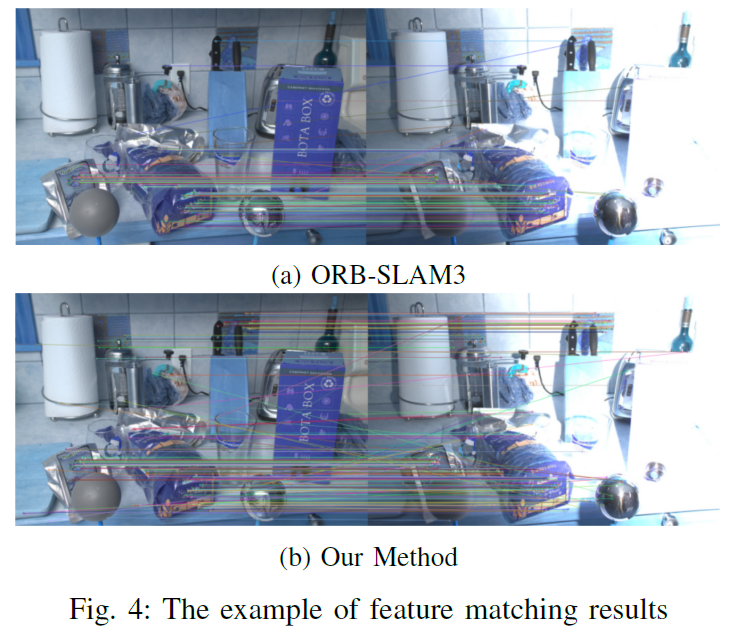
圖2展示了在LOL低光序列中不同光照場景下檢測到的關(guān)鍵點分布情況。比較包括從原始明亮和黑暗圖像以及通過我們的方法處理的增強圖像中提取的關(guān)鍵點。所提出的增強流程顯著增加了黑暗和過亮圖像中穩(wěn)定關(guān)鍵點的數(shù)量。此外,如圖3所示,與ORB-SLAM3相比,我們的方法在低紋理和光照不足的區(qū)域生成了更密集且分布更均勻的關(guān)鍵點集。這表明預(yù)處理和自適應(yīng)控制的結(jié)合增強了特征的可見性,而不會引入噪聲。圖4展示了連續(xù)幀之間特征匹配的定性比較。所提出的方法實現(xiàn)了更一致和準確的對應(yīng)關(guān)系,特別是在受光照變化影響的場景中。這種特征匹配的改進直接有助于增強跟蹤穩(wěn)定性,并減少SLAM流程中的漂移。
C.定位評估
為了驗證我們所提出的IRAF-SLAM系統(tǒng)的定位性能,我們對其與基線ORB-SLAM3以及一些最先進的視覺同步定位與建圖(VSLAM)方法進行了廣泛的評估。
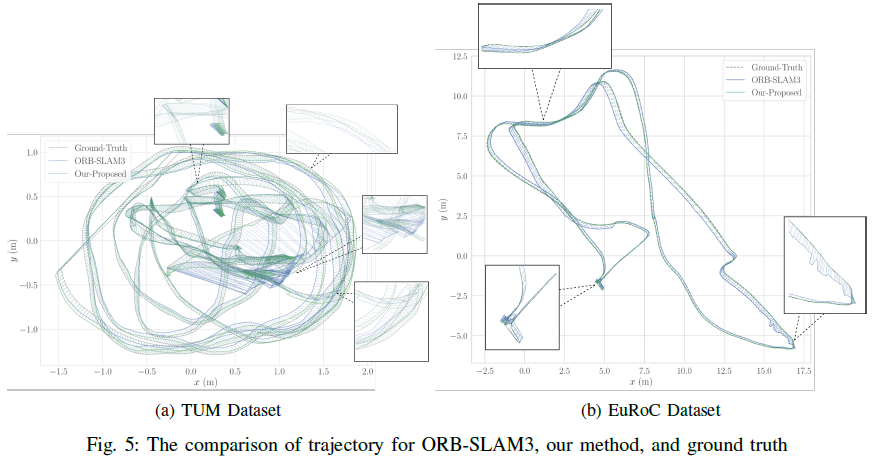
圖5展示了來自兩個數(shù)據(jù)集的代表性序列的自上而下的軌跡圖。在TUMVI數(shù)據(jù)集(圖5a)中,與ORB-SLAM3相比,我們的方法顯著減少了漂移,尤其是在雜亂和光線不足的區(qū)域。在EuRoC數(shù)據(jù)集(圖5b)中,我們的方法也表現(xiàn)出與真實軌跡更接近的對齊效果,特別是在急轉(zhuǎn)彎和快速移動的片段中。圖中的放大圖突出顯示了ORB-SLAM3產(chǎn)生不連續(xù)或不準確路徑的區(qū)域,而我們的方法則保持了平滑、準確的軌跡。
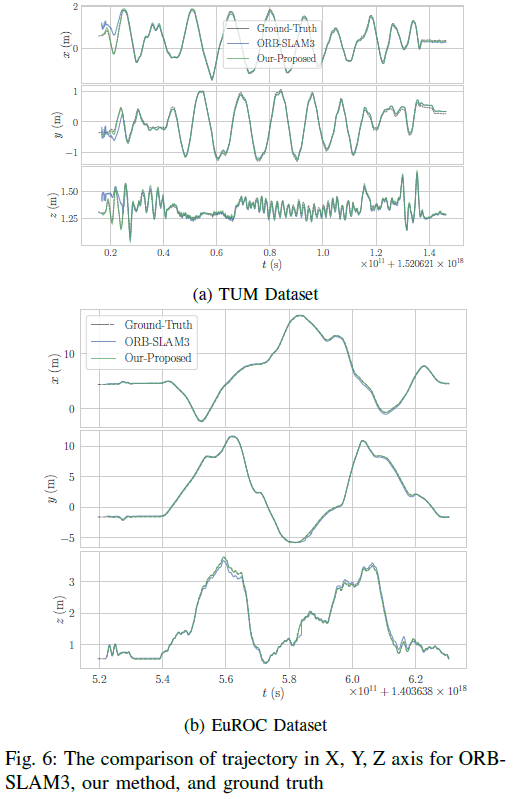
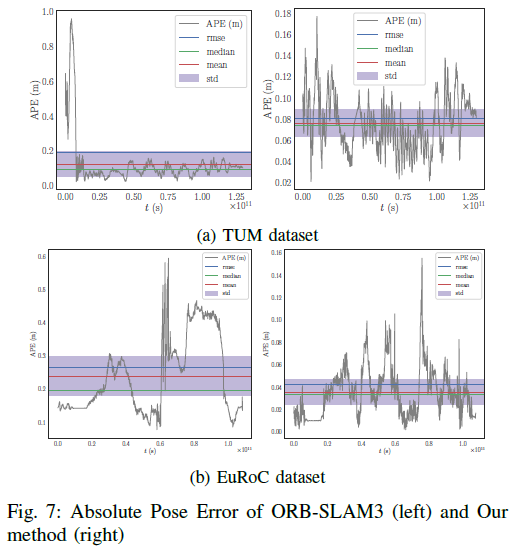
進一步的分析見圖6,其展示了x、y和z軸的軌跡輪廓。在兩個數(shù)據(jù)集中,IRAF-SLAM在所有三個軸上都保持了更穩(wěn)定和精確的估計。這在z軸上尤為明顯,ORB-SLAM3由于特征缺失或不穩(wěn)定,經(jīng)常低估垂直運動,而我們的方法則緊密跟隨真實軌跡輪廓。圖7展示了絕對位姿誤差(APE)。隨著時間的推移,在TUMVI數(shù)據(jù)集(圖7a)上,我們的方法將平均絕對位置誤差(APE)降低了約35%,與ORB-SLAM3相比。同樣,在EuRoC數(shù)據(jù)集(圖7b)上,我們觀察到平均絕對位置誤差(APE)降低了30%至40%,峰值誤差值也顯著下降,這表明對視覺退化具有更高的抗性。
為了更廣泛地評估我們的方法,表I將EuRoC序列上的均方根絕對軌跡誤差(RMSEATE)與包括DSO、SVO、DSM、HESLAM、CLAHE-SLAM和AFE-SLAM在內(nèi)的最新方法進行了比較。
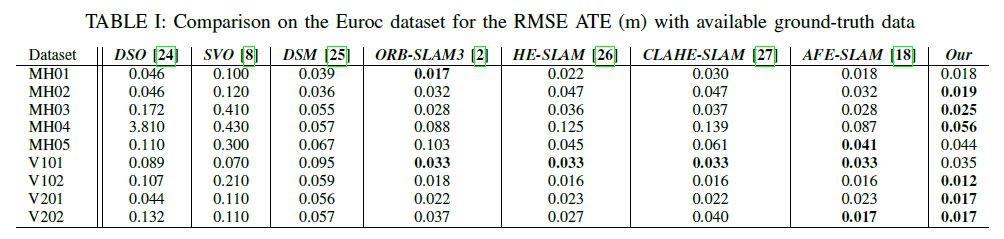
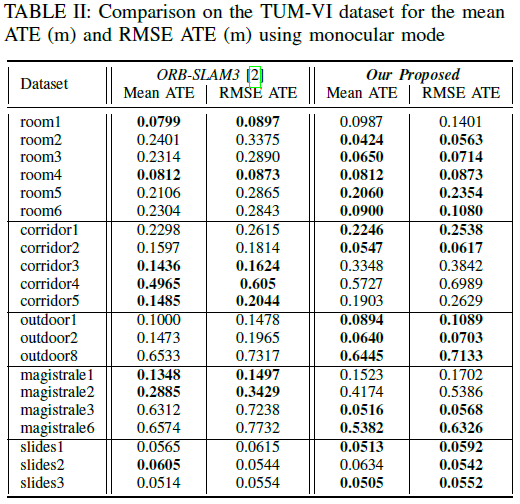
我們的方法在8個序列中的7個序列上實現(xiàn)了最佳或次佳性能。值得注意的是,在MH03序列中,我們的方法實現(xiàn)了0.025米的均方根誤差(RMSE),優(yōu)于ORBSLAM3(0.028米)以及其他所有方法。在像MH04和MH05這樣最困難的序列中,我們的系統(tǒng)仍具有競爭力,即使在光照變化大和快速運動的情況下也能表現(xiàn)出穩(wěn)健的性能。表II定量比較了21個TUMVI序列的平均絕對軌跡誤差(ATE)和均方根ATE。平均而言,IRAF-SLAM相比ORBSLAM3,平均ATE降低了26.5%,均方根ATE降低了28.4%。在諸如room2、magistrale2和corridor4這樣的困難序列中,改進幅度超過70%。例如,在magistrale2中,平均ATE從0.2885降至0.0634(下降78%),均方根ATE從0.3429降至0.0542(下降84%)。
04總結(jié)
在本文中,我們提出了IRAF-SLAM,這是一種強大的VSLAM前端,旨在提升光照不良或不穩(wěn)定環(huán)境中的定位性能。我們的方法整合了圖像增強管道、基于熵和梯度線索的自適應(yīng)FAST閾值以及由關(guān)鍵點密度和光照影響決定的時空特征剔除策略。這些模塊無縫集成到ORB-SLAM3管道中,在不犧牲實時操作的情況下顯著增強了其前端的穩(wěn)健性。在TUMVI和EuRoC數(shù)據(jù)集上進行的大量實驗證實了我們方法的有效性。這些結(jié)果表明,增強前端的穩(wěn)健性,尤其是在動態(tài)光照和低對比度條件下,對SLAM的準確性和穩(wěn)定性有直接且可衡量的影響。
-
光源
+關(guān)注
關(guān)注
3文章
751瀏覽量
70213 -
VSLAM
+關(guān)注
關(guān)注
0文章
26瀏覽量
4549 -
INDEMIND
+關(guān)注
關(guān)注
1文章
40瀏覽量
3759
原文標題:顯著提升穩(wěn)定性和精度!具備光照魯棒和自適應(yīng)特征剔除的VSLAM前端框架
文章出處:【微信號:gh_c87a2bc99401,微信公眾號:INDEMIND】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
魯棒自適應(yīng)控制綜述A survey of robust ad
魯棒自適應(yīng)模糊控制器在復(fù)雜系統(tǒng)中的應(yīng)用
非線性參數(shù)化系統(tǒng)的魯棒自適應(yīng)控制器的設(shè)計和仿真
船舶航向的魯棒自適應(yīng)控制器的設(shè)計和仿真
一種新的快速自適應(yīng)車牌定位方法
帶有未建模動態(tài)的船舶減搖鰭的魯棒自適應(yīng)控制
雙電極電弧焊系統(tǒng)的非線性魯棒自適應(yīng)控制
應(yīng)對CDMA系統(tǒng)有界干擾的魯棒自適應(yīng)功率控制
超聲測距的工作原理及特點及其魯棒自適應(yīng)建模方法的介紹

一種基于魯棒局部紋理特征的背景差分方法

如何使用自適應(yīng)組合核的魯棒視頻進行目標跟蹤算法說明
如何吧具有光照魯棒進行圖像匹配詳細方法說明

使用光照魯棒實現(xiàn)圖像匹配的方法詳細概述
一種魯棒長時自適應(yīng)目標跟蹤算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論