 探討ECU以及車載網絡的現況
探討ECU以及車載網絡的現況
汽車產業正從過往仰賴機械元件運作,如火如荼的轉向智慧連線的目標前進,進而達成自動駕駛最終目標。欲實現自動駕駛,車載網絡及電子控制單元(ECU)勢將有全新發展,本文主要從半導體技術的觀點,審視當今的ECU,接著再根據車載網絡日后發展之可能性,說明未來ECU以及日后半導體技術之限制與機會。
起初,汽車主要仰賴機械元件運作,而如今汽車產業正面臨轉型的過渡期。隨著科技進步,汽車中的部分機械元件逐漸由電子裝置取代(此稱電子化)。目前汽車產業正朝智慧連線車輛的目標邁進,逐步實現車輛間與車輛和基礎建設間的連線,進而達到全面自動駕駛的最終目標。此目標初衷在于減少車禍事故及死亡率。90%以上的車禍都是人為因素造成,而自動駕駛車輛將在實現汽車產業的「零事故」愿景中,扮演關鍵角色。
然而,自動駕駛車輛并非一蹴可幾;而是須依照美國汽車工程師學會(SAE)定義的六個等級循序漸進導入。這些等級從無自動駕駛開始,升至有條件式自動駕駛,到最后的全自動駕駛(然而即使達到最高等級的自動駕駛,也需就法律層面加以說明)。
自動駕駛車輛的等級越高,駕駛人在行車期間的作用就越低,例如車速控制與轉向控制,甚至于全面自動操控;此外,隨著自動化等級提高,車輛也將需要更強的處理能力與感測器以及相關的網絡頻寬,如此也將勢必為車載網絡及相關的ECU帶來全新發展。
本文將探討未來的兩種車載網絡,一種是以網域運算為基礎,另一種則是以中央運算平臺為基礎;此外也將特別說明未來可能出現的ECU。
ECU與車載網絡現況
現代車輛的車載網絡是由許多ECU所組成,中/低階車款所含的ECU約有三十個,高階車款則可能高達一百個。一般的ECU如圖1所示。
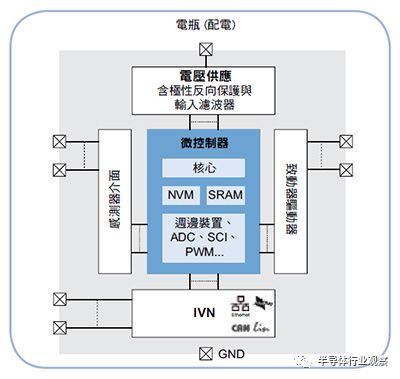
圖1 ECU的主要區塊。
ECU的分區(Partitioning)也是由半導體技術驅動。微控制器一般包含非揮發性記憶體(NVM),以便在除錯或功能升級時,可直接于現場更新軟體。(深)次微米CMOS是經濟實惠的技術解決方案,可將微控制器介面訊號傳輸的額定電壓降至5V或3.3V,核心供應甚至可以更低(如1.5V或1.2V)。
基于此原因,微控制器無法直接連接車用電瓶,兩者間必須加裝穩壓器。然而,穩壓器也必須能夠承受電瓶線路的大幅電壓波動與瞬變電流。此外,電瓶線路也可能出現靜電放電(ESD)和電磁干擾(EMI)。
在圖1中,其他含外部連接的區塊,如車載網絡(IVN)及感測器與致動器介面區塊,也需要能夠承受此類瞬變電流。簡而言之,微控制器外圍的所有區塊構成了一道屏障,保護微控制器免于電壓偏移,并避免可能導致微控制器損壞的情況,而此則須仰賴高電壓技術。
基于這個原因,當今的ECU至少必須配備兩項半導體技術。除此之外,感測器以及若干高功率致動器驅動器,也須要采用更先進的技術。由于圖1僅顯示兩種主要技術,我們尚須評估以單一技術與裝置涵蓋所有功能的可行性。
即使還有最高可以達90V的車用等級NVM等高電壓技術,但與微控制器所使用的深次微米車用技術相較下,這些技術仍落后幾個節點(特征尺寸)。
然而,數位內容與SRMM和NVM記憶體不具價格優勢,尤其是NVM,與多芯片實作相較下,此類單芯片或系統單芯片(SoC)的解決方案價格顯得過高。
因此,SoC在當今ECU中尚未廣泛應用,而是主要用于以LIN為基礎的從屬節點,因為在此類節點中,NVM的需求偏低,也不需要強大處理能力。
一般認知的可行做法,就是在所謂的系統基礎芯片(SBC)中,結合穩壓器與IVN,或者甚至結合穩壓器、IVN和感測器介面,或定義為特殊應用標準產品(ASSP)的致動器驅動器。
上述類型產品的目的在于降低系統成本,而且由于整合式功能也須要使用高電壓技術,因此在技術上完全可行。
車載網絡應用多ECU各司其職
在當今的車載網絡中,ECU通常僅支援一種應用,如引擎控制、車窗升降機或電動輔助轉向系統;例外的情況非常之少,如結合煞車與安全氣囊ECU。因此,最重要的是了解每一個專用ECU都要自行處理感測器資料和演算法。
以當今的煞車ECU為例,維持車輛穩定性和防止輪胎鎖死所使用的演算法,都是由煞車ECU自行運行,就當今的汽車架構而言,幾乎無一例外,這點將于本文其他部分進一步探討。
以網域為基礎之車載網絡
圖2說明了以多個網域為基礎的車載網絡。車用等級以太網絡實體層(PHY)技術與交換器是此架構的要素。如圖2所示,以太網絡科技是作為通訊骨干之用,由此可知網絡包含數個網域控制器。
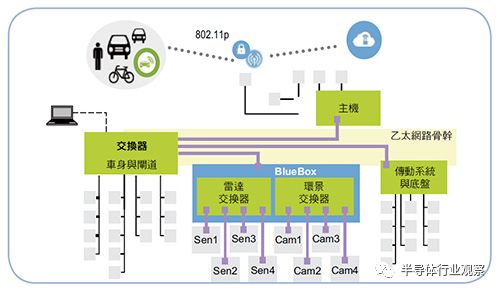
圖2 以網域為基礎的網絡。
其中一個就是實現(半)自動駕駛車輛關鍵的先進駕駛輔助系統(ADAS)網域控制器。汽車電子元件供應商針對此控制器,推出BlueBox開發平臺,可處理來自攝影機和雷達或光達(LiDAR)的多個感測器資料串流,支援感測器融合對于自動駕駛車輛而言,是非常關鍵的重要功能。
BlueBox總計具備90,000 DMIPS(Dhrystone每秒百萬條指令)的運算能力,處理器的總耗電量則不到40瓦。
圖2架構得變更個別ECU,可以在網域控制器上,執行感測器資料處理及/或執行演算法。由于所需的NVM較少,因此相應的ECU可以使用功能性較低的微控制器。在此一情況之下,感測器是位在ECU內部,因此不需要外部感測器連接,便能夠省去使用高電壓技術的耗電問題。
此外,在雷達感測器ECU中,可透過深次微米CMOS技術實現感測器介面。這也可用于實作微控制器,在結合感測器介面與微控制器的ASSP旁,還有一個實作IVN和穩壓器的SBC,用于為ASSP配電。
透過以太網絡供電后,甚至可以省去連接電瓶及相關高電壓技術的需求。如此一來可實現完全采用深次微米技術的SoC解決方案。
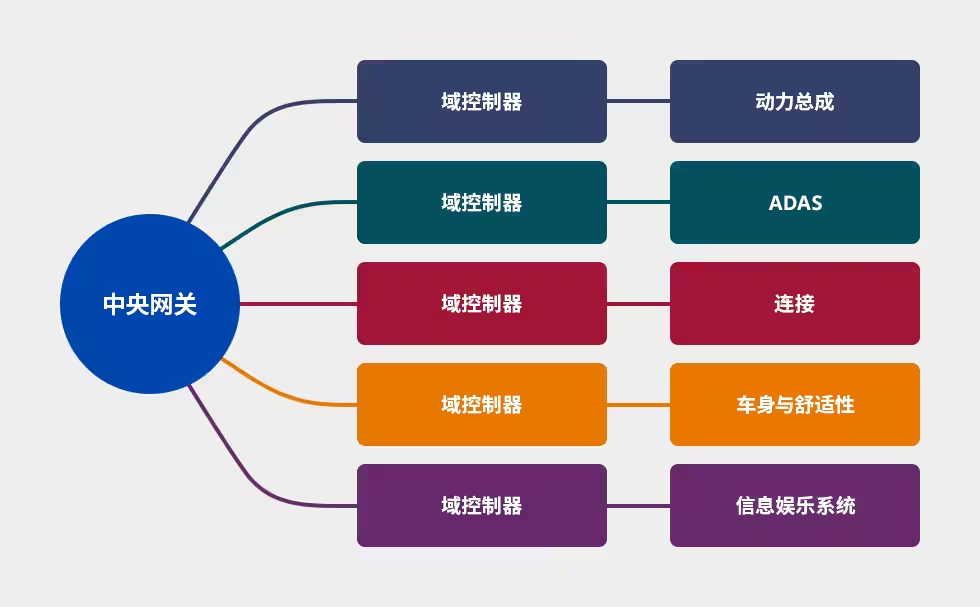
運用中央運算平臺提升可擴充性
在極端情況下,還可考慮將多個或所有網域控制器合并至中央運算平臺的做法,這是在2016年德國路德維希堡舉行的汽車會議中,由多家OEM所提出的方案。此一做法的優點在于具備各種不同的車輛平臺的可擴充性,并且可透過備用記憶體進行日后更新,但這些功能也可以在其他架構上實現。
散熱絕對是這些平臺的重要考量,因此可能須要使用風扇或水冷裝置,雖然電動車幾乎均已配備水冷裝置,但仍會提高模組成本。在這些模組中,采用最先進深次微米CMOS技術的微控制器是最理想的選擇,但這些技術一般均未符合車用資格。
此外,為了顧及重要的行車安全,模組也必須符合需在開發過程和裝置架構設計上采取特殊預防措施的ISO 26262標準。最后還須符合「零ppm」的品質等級。在以上所有層面中,比起欲搶攻汽車市場的新半導體供應商,傳統汽車半導體供應商占較大優勢。探討過中央運算平臺后,接著將評估這些車載網絡對個別ECU的影響。
在此情況中,處理作業同樣不是在ECU上執行,代表不需要龐大的處理能力,所需的NVM也很小。此外,微控制器越小,就越省電,因此可縮小穩壓器的規格,進而提升成本效益。
因此,所有必要功能性均可在符合成本效益的情況下,透過一個高電壓半導體技術實現(包括車用等級NVM),進而打造出以SoC為基礎的ECU。事實上,與當今的車輛相較下,許多ECU均已可達成此一實作。
SoC將結合微控制器與穩壓器、IVN及致動器驅動器和感測器介面,進而降低系統成本。由于模組的功率消耗及實體尺寸均能縮減,因此可進一步降低整體模組成本。另外,相較于傳統架構,現在需要更多頻寬來支援中央網域處理模組的通訊傳輸。
此外,傳送的資料可能攸關行車安全(如剎車或安全氣囊的致動)。因此,當處理程序不是在ECU上執行時,便必須考量到感測器與致動器之間可能會產生額外的延遲,進而影響整個控制回路的穩定性。如此一來,便需要有(最大)延遲確保機制,這將提高IVN成本,但前述的系統成本降低或許可抵銷提高的成本。
ECU運算移至云端仍須克服多種挑戰
我們已經討論過將運算從ECU轉移到網域控制器或中央運算平臺的做法,但在未來的車輛架構中,也可以將部分運算功能性轉移至云端。在此以由AUDI、BMW和Daimler共同持有的HERE公司為例說明。
這項做法可提供當今導航系統所需的地圖與服務,當然也可滿足未來自動駕駛車輛的導航系統需求。問題在于,是否能將各類車輛所需的各種運算能力,通通轉移至云端?這很快就會導致需要快速反應時間的應用程式出現問題,部分原因出在應用程式與云端通訊往返所造成的延遲時間。此外,此做法也會產生大量難以管理的資料。當然,不論是云端之間的相互連線通訊或者云端儲存,資料安全性都是一大關鍵考量。
總而言之,未來的半自動駕駛和自動駕駛車輛,乃至于概念車(X Vehicle),均須要仰賴比當今車輛更強大的處理能力與感測器。本文說明ECU的現況以及此類ECU所使用的半導體技術。文中也根據未來可能出現的車輛架構(例如以網域為基礎的解決方案以及中央運算平臺),介紹新型的ECU。即便以上兩種解決方案均各有利弊,在中短期內合理預計將會導入以網域為基礎的架構,而就中央運算平臺而言,安全、可靠度以及成本等因素仍有待解決,中央模組的部分尤其如此。
-
ecu
+關注
關注
14文章
894瀏覽量
54857 -
自動駕駛
+關注
關注
785文章
13965瀏覽量
167319
原文標題:智能駕駛時代,ECU的角色變了
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
桌面式車載網絡自動化測試系統TESTBASE-DESKNAT

智能化汽車時代:ECU測試如何高效進行?
測試新體驗 | 車載網絡測試套件INTEWORK-ANTP

是德科技亮相第三屆車載網絡和通信架構技術及標準研討會
ECU和OBD的區別
ECU調校對汽車性能的影響
ECU故障診斷工具 如何選擇合適的ECU
車載傳感器網絡是什么意思啊
ECU和汽車處理架構:虛擬化和軟件定義汽車
誰是車載以太網交換芯片TSN玩家TOP 10?

車載平板丨車載數據終端丨車載平板電腦應用
小小噪聲濾波器,應對車載網絡大挑戰
電控單元ECU常見故障分析
車載網絡協議與串擾問題






 工商網監
工商網監
評論