") 基于MX27處理器和CH7024芯片實現(xiàn)機載視頻輸出接口設(shè)計
基于MX27處理器和CH7024芯片實現(xiàn)機載視頻輸出接口設(shè)計

引言
在無人機視頻采集系統(tǒng)中,對于視頻信號的要求比較高,采集到的模擬視頻信號在ARM9處理器中經(jīng)過A/D轉(zhuǎn)換,視頻壓縮編碼后通過無線傳輸?shù)降孛婊荆ㄟ^視頻編碼芯片將數(shù)字信號轉(zhuǎn)換為模擬信號,輸出到顯示設(shè)備上。由于目前數(shù)字視頻具有多種格式,然而,普通的視頻編碼模塊的輸入接口比較單一,不能很好地兼容多格式的視頻輸入信號,故輸出的模擬信號抗干擾性和傳輸距離都不是太好。
針對上述問題,本文提出了一種基于Freescale的MX27處理器,以Linux 2.6.19為內(nèi)核操作系統(tǒng)的多格式視頻輸入編碼模塊設(shè)計方案。硬件方面,以CH7024為主芯片進行電路板設(shè)計;軟件方面,在Linux環(huán)境下,根據(jù)芯片的特點,編寫相應的驅(qū)動程序和寄存器配置。通過加載驅(qū)動程序,將不同格式的數(shù)字視頻信號轉(zhuǎn)換為CVBS復合視頻信號,相比其他的模擬視頻輸出信號,CVBS復合視頻信號將亮度、色度、同步和色彩脈沖信息整合到一根電纜內(nèi),具有傳輸距離遠,抗干擾能力強等優(yōu)點。
1、 設(shè)計方案
1. 1 系統(tǒng)硬件結(jié)構(gòu)
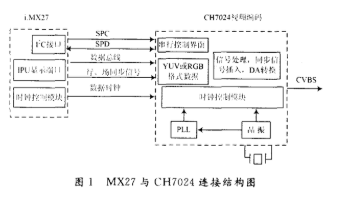
硬件連接如圖1所示,將MX27中LCD控制器輸出的標準數(shù)字視頻信號(包括像素數(shù)據(jù)LD[17:0]、像素時鐘LSCLK,行同步信號LP/HSYNC、場同步信號pLM/VSYNC,數(shù)據(jù)使能信號ACD/OE)接入CH7024的數(shù)字輸入接口。此外,將MX27中I2C控制器的SPC,SPD線直接與CH7024相應的信號線連接。
1.2 視頻輸出接口設(shè)計
由于以前的芯片輸入數(shù)據(jù)只有16位,接口兼容性不好,而選擇的CH7024有24位視頻數(shù)據(jù)信號線,可接收不同的數(shù)據(jù)格式,包括RGB和YC-rCb(如RGB565,RGB666,RGB888,像ITU656的YCrCb),可接收24b/18b/15b/12b/8b等多路復用數(shù)字輸入。為了能在系統(tǒng)運行出現(xiàn)故障時方便地進行復位,設(shè)計中添加了人工復位電路,這也是以前芯片所沒有的。應用CH7024芯片設(shè)計的編碼器,具有很好的兼容性和通用性,所以選擇用CH7024主芯片進行設(shè)計。
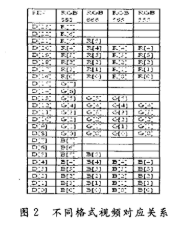
CH7024視頻編碼芯片的輸入接口最多能接收到的視頻信號位數(shù)為24位,輸入格式為RGB888。這樣RGB每個通道用8 b來表示,但是對于RGB 666和RGB565等格式的視頻信號就涉及到每個通道用幾位來表示某個顏色的問題。對于RGB666來說,每個通道用6b來表示;對于RGB565來說,R和B每通道用5 b表示,G通道用6 b表示。對于RGB666和RGB565格式的視頻信號,在設(shè)計中芯片上的24位數(shù)據(jù)線分配情況如圖2所示。通過對相關(guān)寄存器的配置,實現(xiàn)對不同格式視頻信號的接收,使其具有較好的兼容性。該方案是以MX27處理器為平臺進行設(shè)計的,MX27輸出的視頻信號為18位數(shù)據(jù),這樣MX27處理器發(fā)出的RGB666和RGB565格式的視頻,都能通過該方案設(shè)計的編碼器進行編碼。
2、 視頻編碼器軟件設(shè)計
2.1 I2C總線
I2C總線是一種兩線式串行總線,用于連接微控制器及其外圍設(shè)備。由于接口直接在組件之上,因此I2C總線占用的空間非常小,減少了電路板的空間和器件引腳的數(shù)量,降低了互聯(lián)成本。I2C總線可支持多主機控制,其中任何能夠進行發(fā)送和接收的設(shè)備都可以成為主控端。
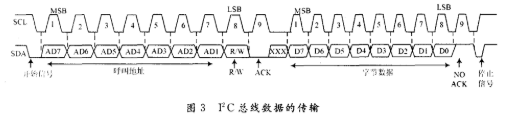
I2C總線的串行總線由數(shù)據(jù)線SDA和時鐘SCL構(gòu)成,可用于發(fā)送和接收數(shù)據(jù),并可在CPU與被控IC之間、IC與IC之間進行雙向傳送。在數(shù)據(jù)傳送過程中共有3種信號,分別是開始信號、結(jié)束信號和應答信號。其中,開始信號是在SCL為高電平時,SDA由高電平向低電平跳變,開始傳送數(shù)據(jù);結(jié)束信號是在SCL為低電平時,SDA由低電平向高電平跳變,結(jié)束傳送數(shù)據(jù);應答信號是接收數(shù)據(jù)的IC在接收到8 b數(shù)據(jù)后,向發(fā)送數(shù)據(jù)的IC發(fā)出特定的低電平脈沖,表示己收到數(shù)據(jù)。CPU向受控單元發(fā)出一個信號后,等待受控單元發(fā)出一個應答信號,CPU接收到應答信號后,根據(jù)實際情況判斷是否繼續(xù)傳輸信號。若未收到應答信號,則認為受控單元出現(xiàn)故障,如圖3所示。
2.2 視頻數(shù)據(jù)的傳輸
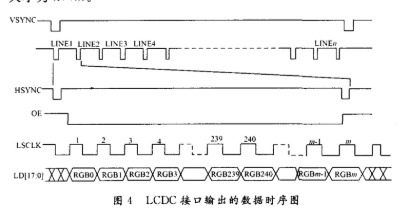
在該設(shè)計中,視頻數(shù)據(jù)經(jīng)過MX27處理器后轉(zhuǎn)換為RGB輸送到LCDC中,通過CH7024輸入接口接收數(shù)據(jù),數(shù)據(jù)傳輸?shù)姆绞饺鐖D4所示。當場同步信號(VSYNC)產(chǎn)生低電平時,說明新的一幀數(shù)據(jù)需要采集,這時采集到的是有效視頻信號;當場同步信號再次產(chǎn)生低電平時,一幀數(shù)據(jù)采集完成,等待進入下一幀數(shù)據(jù)的采集。在場同步信號之間有n行數(shù)據(jù),現(xiàn)以其中一行數(shù)據(jù)來分析,只要開始采集和采集完一行數(shù)據(jù)就會產(chǎn)生行同步信號(HSYNC),當行同步信號產(chǎn)生低電平時,說明要采集的一行為有效數(shù)據(jù),在等待中斷采集;即當OE為下降沿時,開始采集一行數(shù)據(jù);當OE變?yōu)樯仙貢r,一行數(shù)據(jù)采集完畢。圖中給出的LINE[1:n]是說一幀圖像有n行,每行有m個像素,也就說一幀圖像的大小為n×m。
2.3 寄存器配置
在完成對CH7024的硬件電路設(shè)計后,需要在軟件上對相應的寄存器進行配置,在CH7024.C驅(qū)動程序中將相應寄存器地址后面的值進行配置,如視頻輸入格式、輸出格式、分辨率大小等。CH7024寄存器的初始化相關(guān)程序代碼如下:

2.4 驅(qū)動程序編譯加載
由于應用環(huán)境是在Linux操作系統(tǒng)下,開發(fā)板中用的是Linux 2.6.19內(nèi)核,在內(nèi)核中并沒有CH7024相關(guān)的驅(qū)動模塊,這就需要把編寫好的驅(qū)動程序加載到內(nèi)核中,生成需要的模塊形式,重新編譯內(nèi)核,下載到開發(fā)板上。
向內(nèi)核中添加TVOUT CH7024驅(qū)動的流程如下:
至此,修改完畢。此時可以使用make menuconfig。出現(xiàn)內(nèi)核配置的窗口如圖5所示。
選擇device drivers→graphics support可以看到,出現(xiàn)了TVOUT CH7024 driver support→選項,進入選擇“M”,即將驅(qū)動程序編譯成動態(tài)加載模塊,然后通過“make modules”命令生成了CH7024.ko文件。將CH7024編碼器的輸入端連接到PC機,輸出端連接到監(jiān)視器上,上電后,將生成的模塊文件由超級終端下載到開發(fā)板上,在終端中用insmod CH7024.ko加載驅(qū)動。CH7024.ko驅(qū)動加載時,會通過I2C讀CH7024的寄存器信息,并打印它的ID號“Chip version ID(0x22)=0x22”,如果等式右邊的值與左邊括號里的值不等,則說明I2C有問題,或者沒有加載其驅(qū)動,TVOUT則不能正常工作。在I2C正確的情況下,加載相關(guān)視頻采集驅(qū)動程序,通過CCD攝像頭采集到的視頻就能在監(jiān)視器上看到。
3、 結(jié)果分析
在實驗中該方案能夠通過攝像頭采集視頻數(shù)據(jù),并能在監(jiān)視器上實時看到采集的視頻圖像。由于輸入接口設(shè)計成了接收不同格式的視頻信號,使其能夠接收多種格式的視頻信號,編碼器不用更改硬件,只需要在軟件方面做相應的修改就能實現(xiàn)不同格式視頻的接收。
4、 結(jié)語
通過對視頻編碼芯片的軟硬件設(shè)計,使CH7024芯片能夠接收多種格式的視頻信號,由于CVBS信號傳輸距離遠,抗干擾性強,將不同格式的視頻信號轉(zhuǎn)換成CVBS復合視頻信號。隨著技術(shù)的發(fā)展,處理器芯片的輸出視頻數(shù)據(jù)為24位,該設(shè)計的編碼器也能應用,節(jié)省設(shè)計成本,縮短開發(fā)周期,具有一定的實用性。
責任編輯:gt
-
處理器
+關(guān)注
關(guān)注
68文章
19896瀏覽量
235360 -
芯片
+關(guān)注
關(guān)注
460文章
52520瀏覽量
441167 -
Linux
+關(guān)注
關(guān)注
87文章
11511瀏覽量
213867
發(fā)布評論請先 登錄
圖文詳解基于ARM9的MX27嵌入式視頻傳輸開發(fā)系統(tǒng)
MX27 MDK1開發(fā)板介紹
MX27 MDK1開發(fā)板介紹
MX27 MDK1開發(fā)板介紹
[原創(chuàng)]MX27 MDK1產(chǎn)品介紹
I.MX 6處理器介紹
I.MX 6處理器介紹
SEP3203處理器的FPGA數(shù)據(jù)通信接口設(shè)計
SEP3203處理器實現(xiàn)FPGA數(shù)據(jù)通信接口設(shè)計
一種基于Freescale的MX27處理器的嵌入式機載視頻輸出接口設(shè)計
全球首發(fā)飛凌搭載i.MX 9352處理器的核心板

Freescale I. MX27的TI電源管理解決方案

使用TPS6521815 PMIC為NXP i.MX 7處理器供電






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論