") 采用MSP430F169單片機實現(xiàn)光電跟蹤裝置的設(shè)計
采用MSP430F169單片機實現(xiàn)光電跟蹤裝置的設(shè)計
引言
MSP430 單片機具有集成度高、嵌入模塊多(如12位ADC、16位定時器等)、超低功耗等特點,在許多領(lǐng)域內(nèi)得到了廣泛的應(yīng)用。對于一個伺服系統(tǒng),要經(jīng)過信號的采集、轉(zhuǎn)換、信號數(shù)字處理、信號控制等環(huán)節(jié)來完成指定任務(wù)。信號的采集過程和處理是一個重要的環(huán)節(jié),基于MSP430 光電跟蹤伺服系統(tǒng),一方面利用MSP430 單片機外設(shè)多的特點,盡可能使用一片芯片,實現(xiàn)信號的采集、定時處理、PID算法、PWM 驅(qū)動,實現(xiàn)高精度測量的跟蹤,另一方面,利用低功耗的特點實現(xiàn)小型化。
1 光電跟蹤的基本原理
MSP430F169控制的光電跟蹤伺服系統(tǒng)示意圖如圖1所示,其特點是采用MSP430F169作為中央處理單元和控制器。
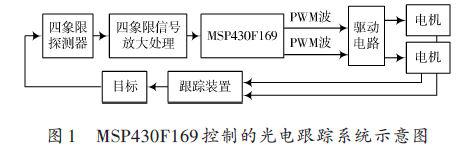
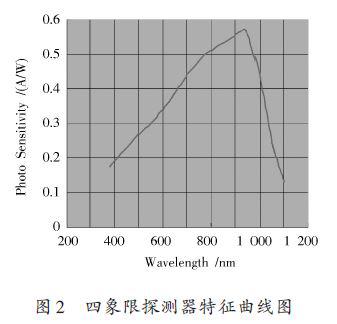
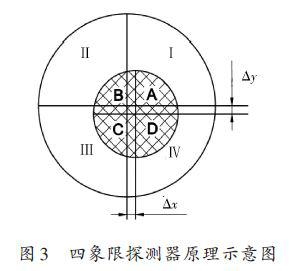
系統(tǒng)通過一個四象限光電探測器,其可探測到的波長范圍是380~1 100 nm,當(dāng)波長為940 nm時,輸出的光功率達到峰值。四象限探測器特性曲線圖如圖2 所示。四象限探測器的感光面的對稱中心與直角坐標(biāo)的零點O 重合,其正交方向分別對應(yīng)x 和y 坐標(biāo)軸,并將感光面劃分為四個象限陣元,四象限探測器原理示意圖如圖3所示。根據(jù)跟蹤光斑在四象限的感光量不同,可以計算出跟蹤目標(biāo)的偏差。當(dāng)跟蹤光斑中心與四象限中心重合時,對應(yīng)著探測器的每個象限接收到的光信號強度相等,經(jīng)計算處理后得到的偏差信號,即誤差信號為零,以確定跟蹤對準(zhǔn)。根據(jù)四象限探測器的特點,四象限接收到光信號后轉(zhuǎn)換成四路電流信號輸出,通過I-V 轉(zhuǎn)換電路,將電流信號轉(zhuǎn)換成四路電壓信號Ex1 ,Ex2 ,Ey1 ,Ey2 ,將電壓信號進行濾波及放大處理,利用MSP430F169內(nèi)部的AD轉(zhuǎn)換器采集數(shù)據(jù),將采集到的電壓信號經(jīng)運算并歸一化處理,然后采用自適應(yīng)PID 算法,計算出坐標(biāo)偏移量Δx 和Δy ,并通過定時器產(chǎn)生PWM波的占空比來調(diào)節(jié)電機的速度,使電機能夠平緩地到達目標(biāo)位置。
2 硬件部分設(shè)計
硬件電路結(jié)構(gòu)可分為:電源模塊、控制模塊、四象限探測器與成像模塊、信號預(yù)處理、驅(qū)動電路等部分。
2.1 電源模塊
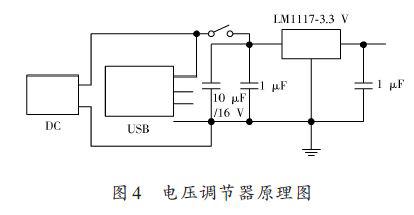
整個系統(tǒng)采用+5 V 作為主供電系統(tǒng),為了保證數(shù)字系統(tǒng)的+3.3 V電源供電,使用LM1117電壓調(diào)節(jié)器得到紋波抑制比高的電壓輸出,如圖4所示。
2.2 四象限放大及濾波處理
激光探測電路的噪聲包括外部擾動和內(nèi)部噪聲。
外部擾動主要來自于激光發(fā)射器、光路傳播介質(zhì)、背景光以及電路本身。這些擾動可以通過先進行背景環(huán)境的測量來改善或者消除。內(nèi)部噪聲是與待測信號并存的,可以濾波的方法抑制噪聲。
目標(biāo)信號處理電路如圖5所示。
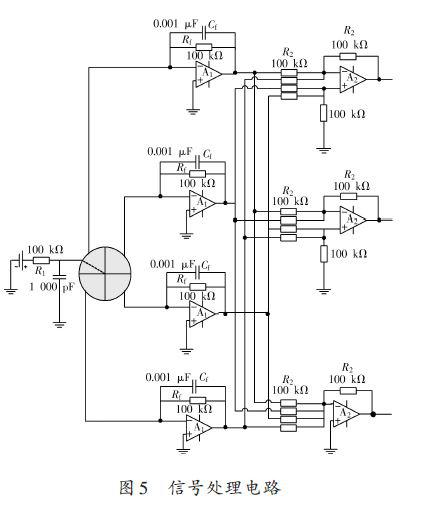
由于內(nèi)部噪聲的存在,并要在噪聲進入放大電路之前濾除,則在光電探測器的陰極加上濾波電路。其截止頻率fc=1 /(RfC)。
令fc=10 kHz,采用一階濾波器,則有C=0.001 μF,R=1 /(Cfc) =100 kΩ。
將A,B,C,D四路電流信號分別經(jīng)過四個運放轉(zhuǎn)換成四路電壓信號。增大OP放大器的反饋電阻時,會引起干擾振蕩。OP放大器有數(shù)pF到數(shù)十pF的輸入寄生電容Cin,會使OP放大器的穩(wěn)定性變差,產(chǎn)生自激振蕩。在OP放大器中加入輸入電容,電阻Rf和Cin構(gòu)成一個新的頻率轉(zhuǎn)折點。為了防止自激振蕩,用電容Cf與反饋電阻Rf并聯(lián)。電容Cf有相位超前的作用,對轉(zhuǎn)折點而言就是零點,零點頻率fz=1 /(2πCf Rf ) .
通常,Cf>Cin,Cin約為5~6 pF.這里取Cf =0.001 μF.
將處理得到的電壓信號通過加法、減法運算電路[5],利用MSP430內(nèi)部的運算能力進行歸一化處理,這樣就能避免除法器的設(shè)計。
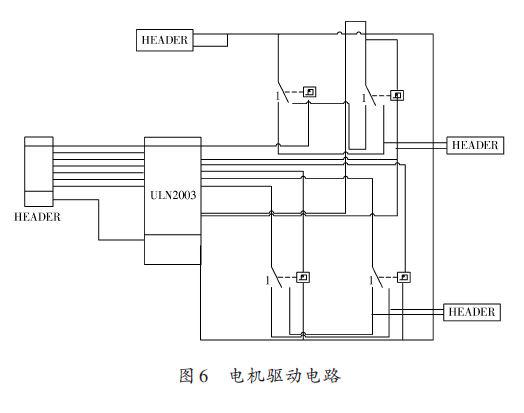
2.3 電機驅(qū)動模塊
利用橋式電路來驅(qū)動直流電機,用PWM 波控制電機的轉(zhuǎn)速,另外用單片機的I/O端口控制其正反轉(zhuǎn)。電機驅(qū)動電路如圖6所示。
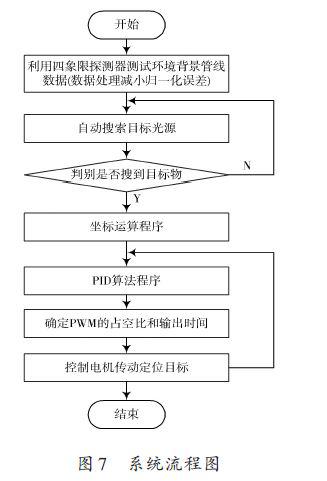
3 系統(tǒng)控制
軟件部分主要包括:測量環(huán)境背景光線數(shù)據(jù)、自動搜索目標(biāo)物、AD采樣、坐標(biāo)運算、PID算法、驅(qū)動電機。單片機端的主程序使用了循環(huán)查詢的方式來決定當(dāng)前應(yīng)該執(zhí)行的任務(wù)。主程序主要完成內(nèi)部ADC,Timer,PWM初始化,采集的數(shù)據(jù)歸一化。其流程圖如圖7所示。
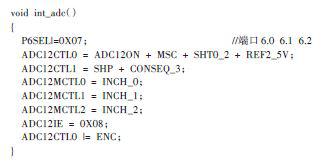
3.1 A/D采集
四象限光電探測器接收的信號進過濾波、放大、加法運算、減法運算處理后,輸出三路電壓信號,因此采用MSP430F169的三通道多次采集,程序如下:
3.2 ADC轉(zhuǎn)換
利用公式:
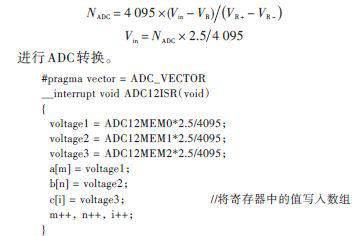
進行ADC轉(zhuǎn)換。
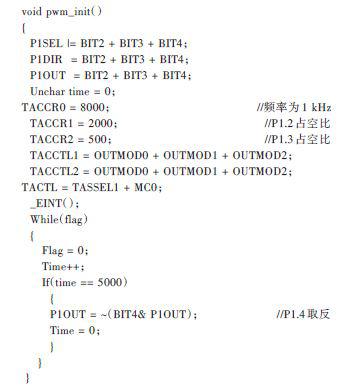
3.3 驅(qū)動電機模塊
電機運動分為搜索目標(biāo)物以及跟蹤目標(biāo)物兩個部分,程序如下:
跟蹤目標(biāo)物的過程中,將采集到的數(shù)據(jù)使用位置式PID算法:

式中:u(k) 為采樣時刻k 時的輸出值;e(k) 為采樣時刻k時的偏差值; e(k - 1) 為采樣時刻k - 1 時的偏差值;u0為t =0時刻對應(yīng)的輸出值。
采用位置式PID 算式,當(dāng)達到設(shè)定的門限值之后再加入積分運算,這樣就能夠避免積分飽和問題。
4 實驗
以波長為650 nm 激光作為目標(biāo)物,首先目標(biāo)物是靜止的,此時跟蹤伺服設(shè)備進行空間搜索的過程。待設(shè)備搜索到目標(biāo)物之后,目標(biāo)物開始移動,這時光斑中心與四象限中心不重合,單片機采集到數(shù)據(jù)后進行運算,輸出PWM 波使電機開始轉(zhuǎn)動,這樣就能使設(shè)備跟著目標(biāo)物運動。實驗裝置如圖8所示。
5 結(jié)論
本設(shè)計采用性能優(yōu)越的MSP430F169 作為控制核心。使用MSP430內(nèi)部的AD模塊以及定時器模塊能夠?qū)崿F(xiàn)精準(zhǔn)的多路數(shù)據(jù)采集。外圍電路的設(shè)計,利用RC濾波器,減小噪聲對信號的影響,同時利用相位補償技術(shù)消除了自激干擾,使信號穩(wěn)定輸出。軟件部分采用位置式PID算式,當(dāng)達到設(shè)定的門限值之后再加入積分運算,這樣就能夠避免積分飽和問題,使跟蹤設(shè)備平緩地到達指定位置。
-
單片機
+關(guān)注
關(guān)注
6065文章
44940瀏覽量
647963 -
探測器
+關(guān)注
關(guān)注
14文章
2699瀏覽量
74184 -
定時器
+關(guān)注
關(guān)注
23文章
3290瀏覽量
117424
發(fā)布評論請先 登錄
利用MSP430F169的USART0的I2C模式與LMP91000通信,UART沒辦法與上位機通訊怎么解決?
基于MSP430單片機的軟件玻璃液晶驅(qū)動程序

msp430單片機的優(yōu)缺點介紹
從MSP430F541x和MSP430F543x遷移到MSP430F541xA和MSP430F543xA
采用低成本MSP430單片機的外部可編程看門狗定時器監(jiān)控系統(tǒng)
利用超低功耗單片機 MSP430 作為系統(tǒng)伴隨芯片應(yīng)用報告
提高MSP430G系列單片機的Flash擦寫壽命的方法
MSP430F677x、MSP430F676x、MSP430F674x多相位計量SoC數(shù)據(jù)表
MSP430F677xA、MSP430F676xA、MSP430F674xA多相儀表計量片上系統(tǒng)(SoC)數(shù)據(jù)表
MSP430F677x1、MSP430F676x1、MSP430F674x1多相位計量SoC數(shù)據(jù)表
MSP430F665x、MSP430F645x、MSP430F565x、MSP430F535x混合信號微控制器數(shù)據(jù)表
MSP430F15x, MSP430F16x, MSP430F161x混合信號微控制器數(shù)據(jù)表
MSP430F14x、MSP430F14x1、MSP430F13x混合信號微控制器數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論