") 關(guān)于工業(yè)機器人的四類坐標系概述
關(guān)于工業(yè)機器人的四類坐標系概述
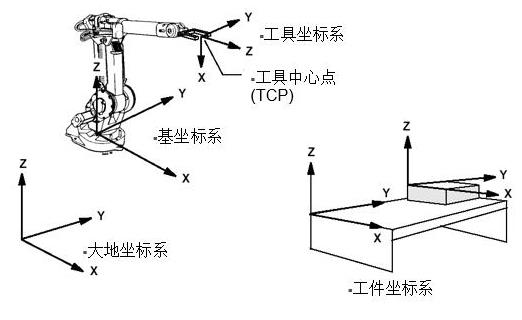
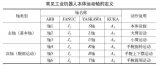
在我們工業(yè)機器人定義中,有四類坐標系,他們分別是軸坐標系、世界坐標系、工具坐標系、基座坐標系。
1、軸坐標系
(1)機器人每個軸均可以獨立的正向或者反向移動。
(2)使用6D鼠標可以使軸運動。
2、世界坐標系
(1)世界坐標系是一個固定的直角坐標系,默認為世界坐標系位于機器人底部
(2)使用6D鼠標可以使軸運動。
()3)可以通過“mouse position”菜單調(diào)整鼠標的位置,使之與操作員操作位置相符,可以通過-/+軟鍵改變位置,每次調(diào)整45°。
示意圖一
示意圖二
3、工具坐標系
工具坐標系是一個直接坐標系,原點位于工具上,請參考以下示意圖:
4、基座坐標系
以目標工件貨工作臺為基準的直角坐標系。
5、坐標系的選擇
坐標系可以根據(jù)機器人提供的人機對話控制面板進行選擇:
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
213文章
29537瀏覽量
211789 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3449瀏覽量
93789
原文標題:工業(yè)機器人編程教程-坐標系統(tǒng)
文章出處:【微信號:indRobot,微信公眾號:工業(yè)機器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
abb機器人工具坐標系問題
各位大佬請教一下,abb機器人工具坐標系用四點法,六點法,手動輸入等方式標定出的工具坐標系的Z方向與實際工具的長度不符,實際工具長度越長坐標系
發(fā)表于 08-07 11:11
介紹坐標系和機器人之間的紐帶即連桿坐標系
介紹坐標系以及它們之間的變換關(guān)系,數(shù)學的意味還是很濃的。講了那么多的公式和規(guī)律,它們要怎么用在機器人上呢?這篇文章將介紹坐標系和機器人之間的紐帶即連桿
發(fā)表于 09-01 06:17
機器人基坐標系標定方法研究
針對借助激光跟蹤儀標定機器人所涉及的坐標系統(tǒng)一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉(zhuǎn)換關(guān)系進行了研究,提出了一種基
發(fā)表于 03-07 10:43
?2次下載
如何進行工業(yè)機器人運動軸的命名與常用坐標系的確定
隨著社會進步、科技發(fā)展,工業(yè)機器人的應用也越來越普遍。由于其種類眾多、運動軸與坐標系也很多,確定起來容易出錯
機器人4大坐標系講解
任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
帶你來剖析機器人的坐標系吧!
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯(lián)動的和帶有外軸的機器人會用到,90%的大地
KUKA C4機器人的軌跡BASE與TOOL坐標
在工業(yè)機器人的操作、編程和調(diào)試時坐標系具有重要的意義。在機器人控制系統(tǒng)中定義了下列坐標系: ROBROOT
機器人坐標系用法和算法原理
一般都會定義機器人第一軸的旋轉(zhuǎn)軸為基坐標系Z軸,旋轉(zhuǎn)中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結(jié)構(gòu),單個機器人里這個基
發(fā)表于 05-11 15:57
?2292次閱讀

機器人坐標系選擇指令和操作步驟
在編程操作過程中,為了確定機器人的空間位置以及姿態(tài)的變化,需要建立合適的工具和用戶坐標系。工具坐標系用于確定每個工具中心點(TCP)的位置和工具姿勢。
發(fā)表于 05-12 14:43
?2513次閱讀

世界坐標系、相機坐標系、圖像坐標系、像素坐標系之間的關(guān)系
相機的成像過程涉及到四個坐標系:世界坐標系、相機坐標系、圖像坐標系、像素坐標系。這篇博客介紹相機


深度剖析機器人的四大坐標系
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯(lián)動的和帶有外軸的機器人會用到,90%的大地
發(fā)表于 11-13 11:24
?2219次閱讀

機器人中都有哪些坐標系
坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎(chǔ),在一個完整的機器人系統(tǒng)中,會存在很多坐標系,這些坐標系之間的位置關(guān)系該如何管理?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論