") 「干貨資料」組合導航模塊SKM-4DX路測數據報告
「干貨資料」組合導航模塊SKM-4DX路測數據報告

慣導模塊是基于衛(wèi)星/慣性組合導航的定位模塊,充分利用慣性導航系統(tǒng)和衛(wèi)星導航系統(tǒng)優(yōu)點,基于最優(yōu)估計算法—卡爾曼濾波算法融合兩種導航算法,獲得最優(yōu)的導航結果;尤其是當衛(wèi)星導航系統(tǒng)無法工作時,利用慣性導航系統(tǒng)使得導航系統(tǒng)繼續(xù)工作,保證導航系統(tǒng)的正常工作,提高了系統(tǒng)的穩(wěn)定性和可靠性。為讓各位工程師更直觀的了解慣導模塊,現將SKM-4DX在公交、小轎車中的路測數據公布如下:
公交導航測試
1、GMOUSE測試環(huán)境
將組合模塊做成GMOUSE 粘貼在公安交車玻璃窗的外側。記錄模塊輸出log。
圖1 GMOUSE的測試環(huán)境和所處環(huán)境信號質量
2、公交城市復雜環(huán)境路徑導航效果
圖2 無遮擋衛(wèi)星導航圖片
圖3 城市高架橋慣導圖片
圖4 城市高架橋慣導效果
圖5 樹木遮擋環(huán)境
3、公交隧道導航效果
圖6 車輛進入隧道的路徑
圖7 由于隧道中沒有衛(wèi)星信號所以手機進入隧道后無位置信息更新
圖8 第一次出隧道誤差8m
車輛從隧道出來后路徑與隧道出口的偏差為8m, 計算其誤差距離—慣導距離之比為 8/1473,不到1%。
小轎車導航測試
1、模塊測試環(huán)境
將模塊固定轎車前擋風玻璃下面,天線也固定在擋風玻璃下面,用普通無慣導數據模塊與組合和導航模塊做導航路徑對比。
圖1 固定安裝圖片
圖2 搜星情況
2、小轎車城市復雜環(huán)境路徑導航效果
圖3 城市道路開闊道路路徑
圖4 車輛在高架橋底部行駛路徑
圖5 車輛在高架橋底部行駛環(huán)境
3、小轎車車庫導航路徑圖
圖6 車庫導航路基圖
車輛在深圳北地下車庫繞行,先繞一大圈,再繞兩小圈,三圈在同一個路徑重合,從路徑上看重合的位置定位路徑也幾乎完全重合說明其車庫定位效果理想。
4、小轎車隧連續(xù)道導航路徑圖
圖7 隧道的整體效果圖
圖8 隧道總長7100米
圖9 第一次出隧道誤差21m , 誤差距離—慣導距離之比為 21/7100
圖10 第一次出隧道誤差7.1m , 誤差距離—慣導距離之比為 7.1/7100
圖11連續(xù)隧道的峽谷區(qū)導航效果
組合導航是衛(wèi)星和慣性導航組合導航,對于連續(xù)隧道,中間有小段有衛(wèi)星信息對路徑校驗的貢獻很小,卻考驗衛(wèi)導,慣導的切換。
組合導航模塊SKM-4DX優(yōu)勢
1、可發(fā)現并標校慣導模塊誤差,提高導航精度;
2、彌補衛(wèi)星導航的信號缺損問題,提高導航能力;
3、正價觀測冗余度,提高異常誤差的監(jiān)測能力,提高系統(tǒng)的容錯功能;
4、提高導航系統(tǒng)的抗干擾能力,提高完好性。
SKYLAB
慣導模塊SKM-4DX現已支持DEMO送樣,本次2018年中國國際社會公共安全產品博覽會【SKYLAB展位號:(E4E01)】也將優(yōu)勢展出,更多組合導航模塊應用選型可直接訪問SKYLAB網站或直接撥打咨詢熱線:0755-83408210。
發(fā)布評論請先 登錄
組合導航系統(tǒng)中的慣性導航系統(tǒng)是什么?
海積信息推出高精度組合導航終端
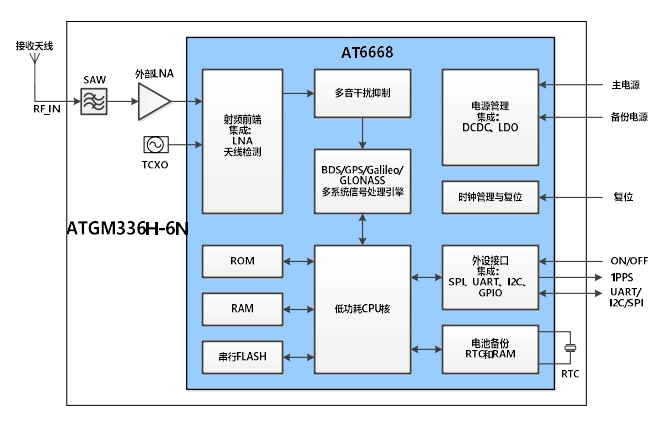
GNSS多模定位導航模塊數據手冊:ATGH336H-6N74
高精度GNSS+INS組合導航:速度、位置、姿態(tài)全掌握

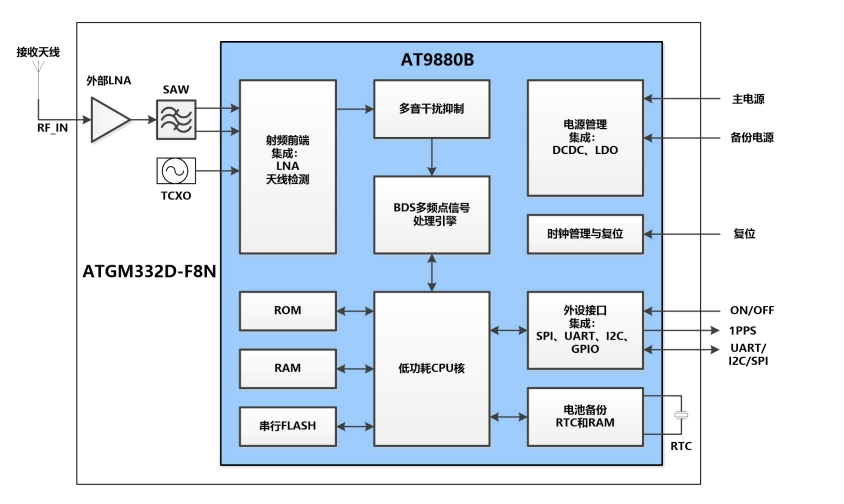
ATGM332D-F8N:高性能單北斗多頻定位導航模塊數據手冊
E108-GN系列GNSS多模衛(wèi)星導航定位模塊產品說明
ADC16DX370 JESD204B串行鏈路的均衡優(yōu)化

ATGM336H-5N杭州中科微BDS定位導航模塊技術規(guī)范
ATGM336H-5N杭州中科微BDS定位導航模塊規(guī)格參數
ATGM336H-5N杭州中科微BDS/GNSS全星座定位導航模塊電氣參數
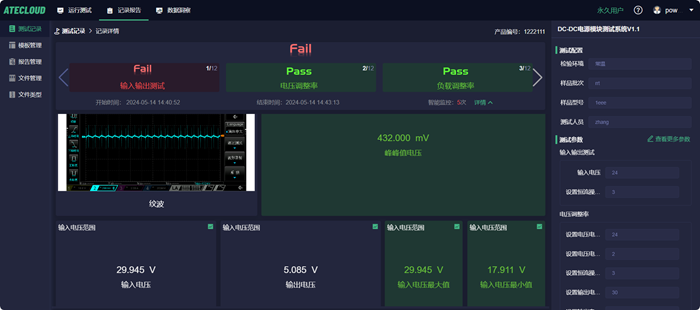
電源模塊測試系統(tǒng)ATE的數據報告與數據分析功能
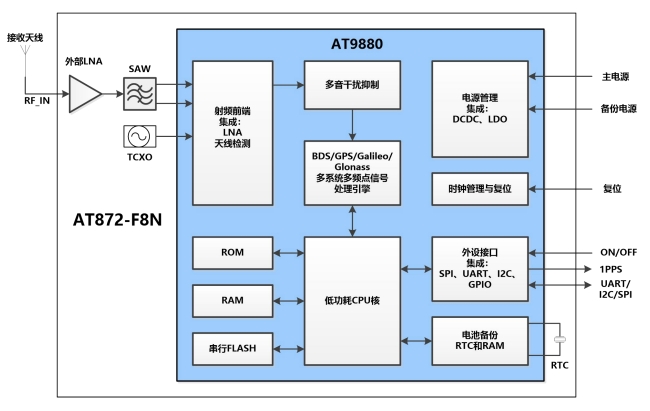
AT872-F8N高性能GNSS全模多頻定位導航模塊數據手冊
ATGM332D-F8N低功耗單北斗多頻定位導航模塊資料
ADC16DX370雙路16位370MSPS模數轉換器(ADC)數據表





 工商網監(jiān)
工商網監(jiān)
評論