") SMART如何與V90伺服實現(xiàn)內(nèi)部位置控制
SMART如何與V90伺服實現(xiàn)內(nèi)部位置控制
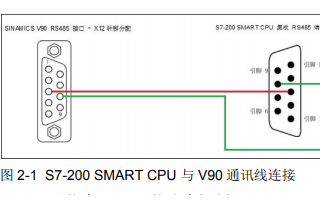
V90伺服可實現(xiàn)內(nèi)部位置控制,但使用PLC的I/O口控制接線及應(yīng)用相對比較復(fù)雜,V90集成了Modbus和USS通信,可以利用通信控制伺服實現(xiàn)內(nèi)部位置控制和速度控制,只需要一根通信電纜即可實現(xiàn)控制大為的簡化了接線。關(guān)鍵在于如何編寫modbus通信程序。
一.位置模式IPOS伺服的關(guān)鍵參數(shù)進(jìn)行設(shè)置:
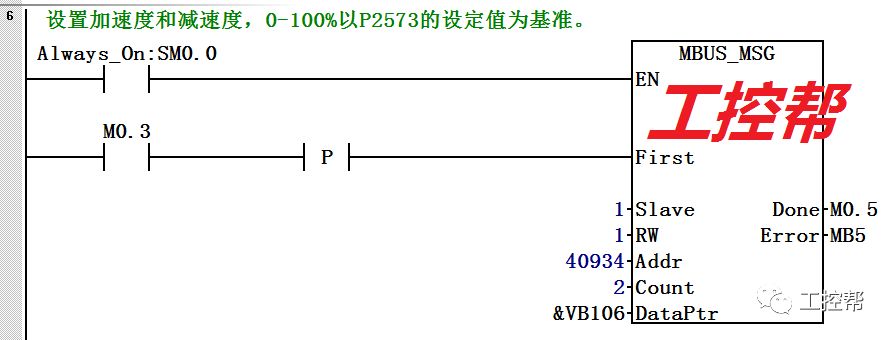
1.為驅(qū)動設(shè)置RS485總線地址。?p29004 = 12.通過參數(shù)p29007選擇Modbus協(xié)議。?p29007 = 23.通過參數(shù)p29008選擇Modbus控制源。?p29008 = 1(p29008 = 1:設(shè)定值和控制字來自于Modbus PZD)4.通過參數(shù)p29009設(shè)置傳輸波特率。?p29009 =6(9600波特率)5.保存參數(shù)并重啟驅(qū)動。6.設(shè)置驅(qū)動的工作模式為IPOS控制模式。7.配置PLC相關(guān)參數(shù)。
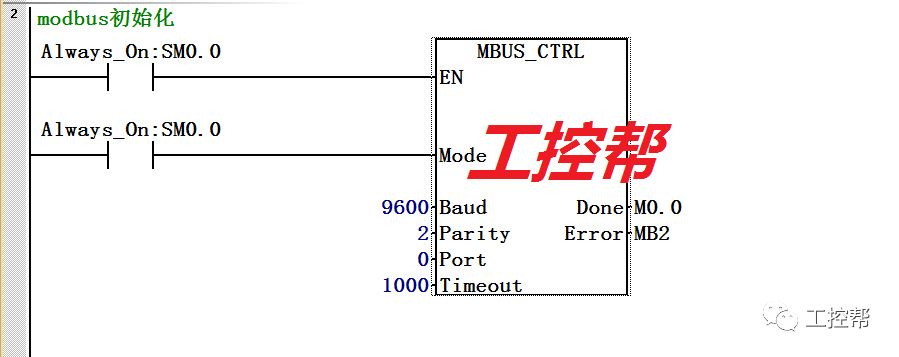
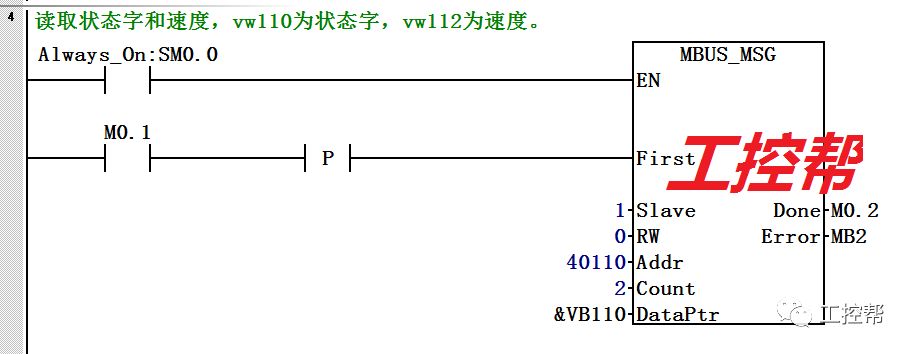
編寫程序:
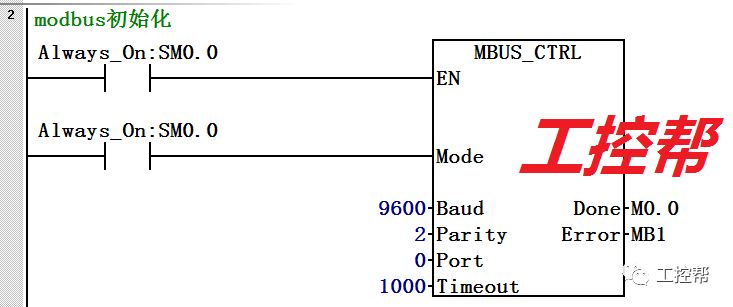
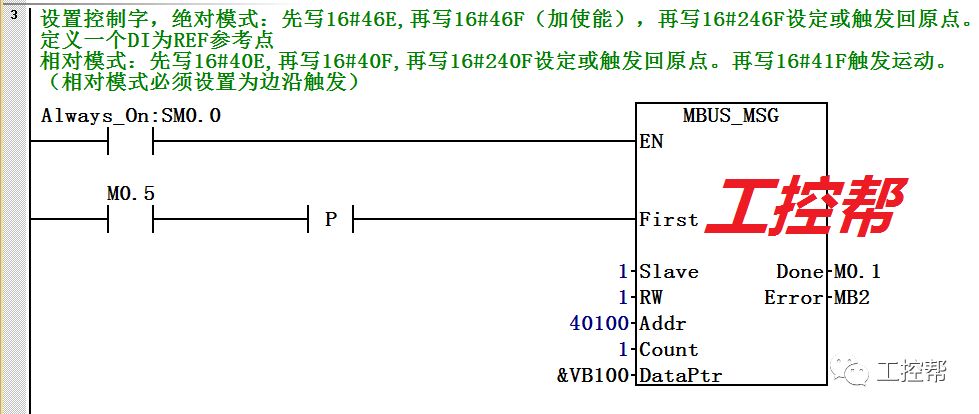
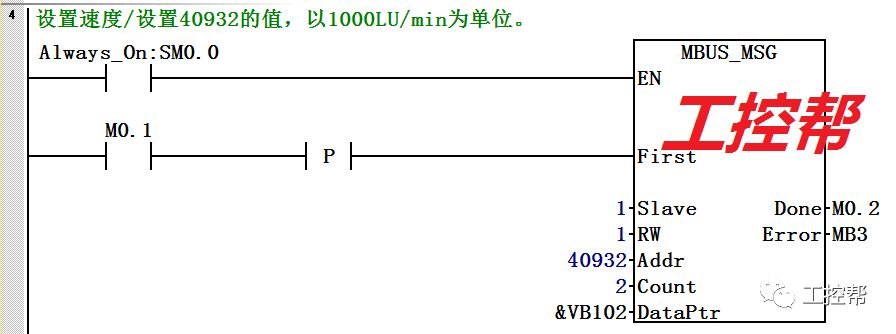
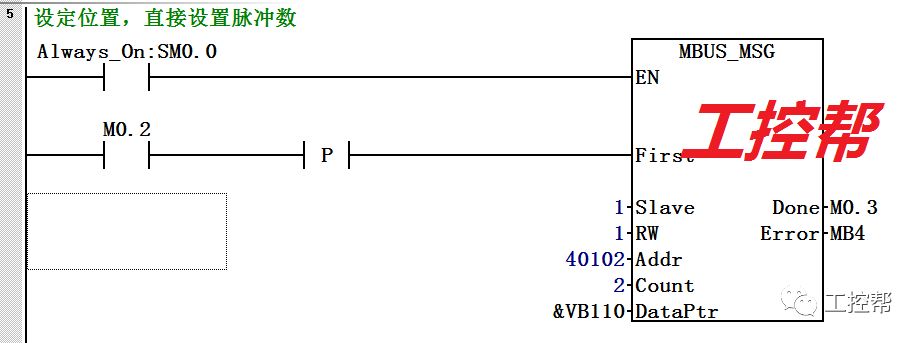
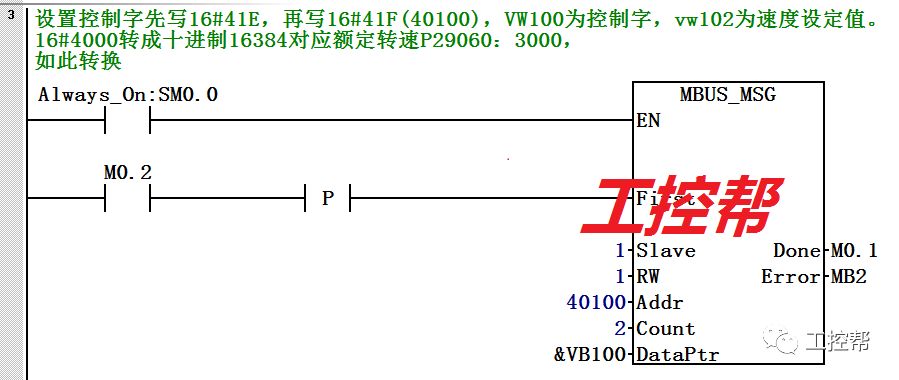
控制字每位設(shè)置方法如下表:
| 位 | 信號 | 描述(IPOS內(nèi)部位置模式) |
| 0 | SON_OFF1 | 通過上升沿伺服使能(脈沖可以被使能)0:OFF1(通過斜坡函數(shù)發(fā)生器停車,脈沖被取消,準(zhǔn)備上電就緒) |
| 1 | OFF2 | 1:無OFF2(允許使能)0:OFF2(立即取消脈沖,上電被禁止) |
| 2 | OFF3 | 1:無OFF3(允許使能)0:OFF3(快速停車,脈沖被消除且上電被禁止) |
| 3 | OPER | 1:允許運(yùn)行(脈沖可以被使能)0:禁止運(yùn)行(取消脈沖) |
| 4 | SETP_ACC | 觸發(fā)上升沿來接收MDI設(shè)定值 |
| 5 | TRANS_TYPE SE | 1:立即接收新的設(shè)定值0:通過觸發(fā)上升沿來接收新的設(shè)定值 |
| 6 | POS_TYP | 1:絕對定位0:相對定位 |
| 7 | RESET | 復(fù)位故障 |
| 8 | 預(yù)留 | |
| 9 | 預(yù)留 | |
| 10 | PLC | 使能PLC的控制權(quán) |
| 11 | 預(yù)留 | |
| 12 | 預(yù)留 | |
| 13 | SREF | 啟動回參考點(diǎn)(對于回參考點(diǎn)模式0,用作REF信號) |
| 14 | 預(yù)留 | |
| 15 | 預(yù)留 |
二.速度模式S參數(shù)設(shè)置:
1.為驅(qū)動設(shè)置RS485總線地址。?p29004 = 12.通過參數(shù)p29007選擇Modbus協(xié)議。?p29007 = 23.通過參數(shù)p29008選擇Modbus控制源。?p29008 = 14.通過參數(shù)p29009設(shè)置傳輸波特率。?p29009 =6(9600波特率)5.保存參數(shù)并重啟驅(qū)動。6.設(shè)置驅(qū)動的工作模式為S控制模式。7.配置PLC相關(guān)參數(shù)。
編寫程序:
-
通信
+關(guān)注
關(guān)注
18文章
6182瀏覽量
137415 -
SMART
+關(guān)注
關(guān)注
3文章
229瀏覽量
45298
原文標(biāo)題:SMART如何與V90伺服modbus通信實現(xiàn)內(nèi)部控制?看完就懂了!
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
用Smart ST60控制V90走絕對定位控制,怎么調(diào)整伺服加減速時間及伺服剛性?
基于S7-1200的V90的位置控制
基于S7-1200實現(xiàn)V90的MDI功能

S7-1200連接V90實現(xiàn)位置閉環(huán)控制設(shè)計

基于S7-200實現(xiàn)V90位置控制的MDI功能介紹

基于S7-200實現(xiàn)V90速度控制設(shè)計應(yīng)用

如何通過FM353實現(xiàn)與V90的位置控制

西門子SINAMICS V90 light伺服系統(tǒng)
S7-200 Smart如何通過Modbus通信實現(xiàn)對V90的速度控制
輕松搞定西門子V90高性能伺服的辦法

實例S7-1500PLC連接SINAMICS V90伺服系統(tǒng)實現(xiàn)位置閉環(huán)控制

SINAMICS V90基本伺服驅(qū)動系統(tǒng)產(chǎn)品樣本
西門子V90伺服驅(qū)動系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論