") 無人機(jī)航空攝影測量技術(shù)在引黃濟(jì)寧調(diào)水工程中的應(yīng)用
無人機(jī)航空攝影測量技術(shù)在引黃濟(jì)寧調(diào)水工程中的應(yīng)用
一、引言
1.1 引黃濟(jì)寧調(diào)水工程簡介
青海省位于我國西部,是多民族聚居區(qū),自然條件差,經(jīng)濟(jì)發(fā)展滯后,為全國最為貧困的地區(qū)之一。位于青海省東部的西寧市和海東市是全省政治、經(jīng)濟(jì)、交通、文化中心地區(qū),以僅占全省2.9%的土地面積,3.5%的水資源量,支撐了全省58%的人口,57%的GDP和54%的耕地面積。
引黃濟(jì)寧調(diào)水工程是國務(wù)院西部開發(fā)領(lǐng)導(dǎo)小組確定的近期重點(diǎn)推進(jìn)的引調(diào)水工程,供水對(duì)象包括西寧—海東城市群、湟水兩岸農(nóng)業(yè)及生態(tài)林帶供水以及湟水干流生態(tài)補(bǔ)水,初步考慮近期調(diào)水量6億m3,遠(yuǎn)期調(diào)水量12億m3。工程以黃河干流已建龍羊峽水庫為取水水源,經(jīng)隧洞穿越拉脊山自流輸水,受水區(qū)分東線城市群、南線湟水南岸灌區(qū)、北線湟水北岸生態(tài)林三條供水線路。
1.2 引黃濟(jì)寧工程的意義
引黃濟(jì)寧調(diào)水工程是穩(wěn)增長、促發(fā)展、惠民生的重大舉措,是貫徹落實(shí)“五大發(fā)展理念”和國家西部開發(fā)戰(zhàn)略的重大水資源保障工程,對(duì)加快青海省現(xiàn)代化建設(shè)、牢筑西部生態(tài)安全屏障、實(shí)現(xiàn)民族復(fù)興具有重大戰(zhàn)略意義。
1.3無人機(jī)航空攝影測量技術(shù)的應(yīng)用
傳統(tǒng)大比例尺地形圖測繪通常由外業(yè)人工測量和大飛機(jī)航空攝影測量完成,但是這兩項(xiàng)傳統(tǒng)技術(shù)有明顯的短板:人工測量單點(diǎn)精度最高,但是需要足夠的地形點(diǎn)才能準(zhǔn)確描述地形,且需大量的人力物力,周期長,效率低下,受天氣、地形、交通等因素的影響和制約;大飛機(jī)航測需要專業(yè)的大型起降場地,空域申請(qǐng)手續(xù)繁瑣,優(yōu)勢在大范圍大面積(全省或全國)測圖中能得到體現(xiàn)。低空無人機(jī)航測技術(shù),有靈活機(jī)動(dòng)、外業(yè)工作量少等優(yōu)勢,在中小范圍地形圖測繪中有明顯的優(yōu)勢。
該項(xiàng)目所在區(qū)域地形復(fù)雜,時(shí)間緊任務(wù)重,傳統(tǒng)的大比例尺測圖方法無法如期完成,無人機(jī)航測技術(shù)在該項(xiàng)目中的應(yīng)用,其高效率、高機(jī)動(dòng)性的優(yōu)點(diǎn)得到了很好的發(fā)揮。
二、無人機(jī)航空攝影測量技術(shù)
隨著無人機(jī)與數(shù)碼相機(jī)技術(shù)的發(fā)展,基于無人機(jī)平臺(tái)的數(shù)字航攝技術(shù)已顯示出它的優(yōu)勢,無人機(jī)航空攝影測量技術(shù)是無人機(jī)與航空攝影測量的完美結(jié)合。無人機(jī)航空攝影測量相對(duì)于傳統(tǒng)外業(yè)人工測量和大飛機(jī)航空攝影測量,具備以下優(yōu)點(diǎn):①攜帶方便,無需專業(yè)飛行跑道和復(fù)雜的空域申請(qǐng),可快速進(jìn)入測區(qū)開展工作;②操作簡單,成本較低,作業(yè)人員培訓(xùn)周期較短;③飛行高度低,可以獲取厘米級(jí)高分辨率的影像數(shù)據(jù);④效率高,一天能拍攝幾十個(gè)平方公里的影像;⑤對(duì)環(huán)境要求較低,可以勝任危險(xiǎn)區(qū)域的飛行任務(wù)。
無人機(jī)航測相對(duì)于傳統(tǒng)測繪手段的諸多優(yōu)勢,近年來得到了廣泛的應(yīng)用,已廣泛應(yīng)用于各行業(yè)的大比例尺測繪、災(zāi)害應(yīng)急、規(guī)劃、土地資源調(diào)查等領(lǐng)域。
2.1 無人機(jī)航測系統(tǒng)組成
無人機(jī)航測系統(tǒng)主要包括飛機(jī)平臺(tái)系統(tǒng)(動(dòng)力系統(tǒng)傳感器、信號(hào)處理、GNSS接收、無線電控制)、定位定姿系統(tǒng)(簡稱POS系統(tǒng),主要包括GNSS導(dǎo)航定位系統(tǒng)和IMU定姿系統(tǒng))、信息采集系統(tǒng)(相機(jī)、傳感器、無線電控制)、地面控制系統(tǒng)(無線電控制、GPS導(dǎo)航、計(jì)算機(jī)、數(shù)據(jù)處理系統(tǒng))、電源系統(tǒng)等。本項(xiàng)目測區(qū)飛行采用深圳飛馬機(jī)器人科技有限公司生產(chǎn)的F300固定翼平臺(tái),影像獲取搭載SONY DSC-RX1RⅡ相機(jī),飛控系統(tǒng)采用飛馬無人機(jī)管家3.0航測系統(tǒng),數(shù)據(jù)處理采用清華山維3.0、CAD2010等圖像處理軟件和繪圖軟件。
2.2 技術(shù)測圖原理
無人機(jī)航攝技術(shù)的基本原理是通過搭載在無人機(jī)飛行平臺(tái)上的相機(jī),采集地面上的影像數(shù)據(jù)和飛機(jī)飛行數(shù)據(jù),然后用計(jì)算機(jī)(工作站)處理影像數(shù)據(jù),用繪圖系統(tǒng)處理影像數(shù)據(jù)、圖形顯示和成果輸出。
2.3作業(yè)流程
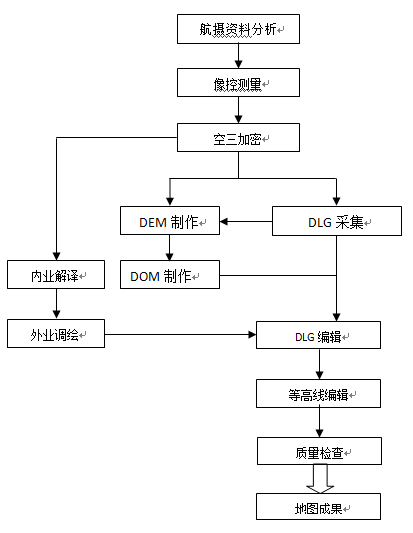
基于無人機(jī)航攝技術(shù)快速測制大比例尺地形圖的作業(yè)實(shí)施流程主要分為外業(yè)測量和內(nèi)業(yè)處理。外業(yè)包括影像獲取、像控布設(shè)測量、航線設(shè)計(jì)及飛行實(shí)施、影像質(zhì)量檢查、pos數(shù)據(jù)處理、檢查點(diǎn)測量與外業(yè)調(diào)繪等;內(nèi)業(yè)數(shù)據(jù)處理包括空三加密、DEM、DOM生產(chǎn)、立體測圖、DLG生產(chǎn)、編輯成圖、數(shù)據(jù)檢查及驗(yàn)收等。
流程圖如下:
三、無人機(jī)航測技術(shù)在引黃濟(jì)寧項(xiàng)目中的應(yīng)用
此次測量任務(wù)涉及青海省西寧市、貴德縣、湟中縣、平安區(qū)、樂都區(qū)、民和縣6個(gè)行政地區(qū),有23處1:2000地形圖測繪任務(wù),時(shí)間緊任務(wù)重,有8處測區(qū)為山地和高山區(qū),海拔均超過2500米,山勢陡峭,交通不便,人工測量難度大,為保證工期和質(zhì)量對(duì)這8處測區(qū)進(jìn)行無人機(jī)航測,其他測區(qū)用傳統(tǒng)測圖方式進(jìn)行測繪。本次航空攝影作業(yè)采用電機(jī)固定翼無人機(jī)(飛馬F300),搭載SONY RX1RII數(shù)碼相機(jī),航空攝影地面分辨率12cm,采用航空攝影相機(jī)焦距35mm,本文以測區(qū)一(拉西瓦鎮(zhèn)測區(qū))和測區(qū)二(南干渠受水區(qū)林地典型地塊測區(qū))為例進(jìn)行闡述。
3.1 外業(yè)
外業(yè)包括:無人機(jī)外業(yè)環(huán)境及路線的選定,無人機(jī)起飛,無人機(jī)的降落以及像控點(diǎn)的采集。
3.1.1 無人機(jī)路線的選定
一般在谷歌地球上選好起飛降落的地方,再實(shí)地踏勘確定。起降點(diǎn)應(yīng)選在方圓100米范圍內(nèi)無遮擋的平坦區(qū)域,遠(yuǎn)離公路、高壓電線、建筑物等。選好起降點(diǎn),把測區(qū)范圍導(dǎo)入飛馬公司的無人機(jī)管家軟件的智航線模塊,測出起降點(diǎn)坐標(biāo),選擇航測范圍,軟件自動(dòng)計(jì)算航線、架次等,做好起飛前的準(zhǔn)備。
3.1.2 無人機(jī)的起飛
一般選在晴朗的天氣,最好云少風(fēng)小(風(fēng)力在5級(jí)以下)的上午10點(diǎn)至下午2點(diǎn)的時(shí)間段(此時(shí)段太陽較高,采集的影像清晰且陰影較小)進(jìn)行飛行。飛馬儀器公司的F300型無人機(jī)采用拋投起飛方式,航測人員經(jīng)過專業(yè)培訓(xùn),取得飛行執(zhí)照后方可操作。此次航測區(qū)域海拔高空氣稀薄,拋出后有時(shí)會(huì)有少許的下沉,因此拋投需借助少許風(fēng)力,最好在較高的地方拋投,對(duì)投手的經(jīng)驗(yàn)、技術(shù)、心理素質(zhì)也是極大的考驗(yàn)。
3.1.3 無人機(jī)的拍攝
在無人機(jī)順利升空后,由飛機(jī)控制系統(tǒng)(簡稱飛控系統(tǒng))控制飛機(jī)沿著規(guī)劃好的路線飛行,地面站電腦通過數(shù)傳電臺(tái)監(jiān)控飛機(jī)在空中的飛行情況,如果飛機(jī)飛出有效工作范圍或失聯(lián)時(shí)間超過預(yù)設(shè)值,飛控系統(tǒng)將會(huì)控制飛機(jī)返航。
3.1.4 無人機(jī)的降落
F300無人機(jī)有傘降和滑降兩種方式,滑降對(duì)地面要求較高,通常用傘降方式。無人機(jī)順利降落后檢查機(jī)身及相機(jī)安全,取出相機(jī)檢查影像圖片的質(zhì)量,然后采取快拼軟件將采集的影像數(shù)據(jù)拼接,檢查外業(yè)飛行質(zhì)量。
3.1.5 像片控制測量
像控測量采用GNSS RTK進(jìn)行測量,像控點(diǎn)一般選擇既能在影像上容易辨別又能在實(shí)地準(zhǔn)確測量的明顯地物點(diǎn)、接近正交的線狀地物交點(diǎn)、地物拐角點(diǎn)或固定的點(diǎn)狀地物上,或者在測區(qū)范圍內(nèi)均勻分布撒上1.6米長的白灰十字圖形。利用奧維地圖軟件提前規(guī)劃好測區(qū)的布點(diǎn)路線,逐點(diǎn)施測。
3.1.6 影像圖調(diào)繪
影像調(diào)繪采用內(nèi)外業(yè)結(jié)合的方法作業(yè),對(duì)測區(qū)內(nèi)居民地、水系設(shè)施、交通設(shè)施、植被土質(zhì)、管線設(shè)施等進(jìn)行調(diào)查和測量。
3.2 內(nèi)業(yè)
3.2.1 空三加密
使用飛馬無人機(jī)管家軟件完成空三加密和DEM、 DOM的制作。先在智檢圖模塊完成航飛質(zhì)量的檢查和評(píng)估,在智理圖模塊完成無人機(jī)數(shù)據(jù)預(yù)處理,提供畸變糾正、影像勻色、金字塔創(chuàng)建等功能,在智拼圖模塊完成影像自動(dòng)拼接。以飛馬F300為例,步驟如下:

(1)下載無人機(jī)、基站等原始數(shù)據(jù),進(jìn)行數(shù)據(jù)預(yù)處理。
(2)創(chuàng)建工程,導(dǎo)入影像文件和POS數(shù)據(jù)。
(3)連接點(diǎn)匹配,特征點(diǎn)提取和匹配。
(4)控制點(diǎn)量測,進(jìn)行平差計(jì)算和平差優(yōu)化,平差優(yōu)化結(jié)束后檢查空三報(bào)告中的精度統(tǒng)計(jì),如精度滿足規(guī)范要求可進(jìn)入下一步,如不滿足規(guī)范要求,則可進(jìn)行控制點(diǎn)的調(diào)整,重復(fù)平差優(yōu)化功能,直至精度符合要求,如精度始終滿足不了要求,需檢查原始數(shù)據(jù)和預(yù)處理數(shù)據(jù)等。
(5)輸出空三成果,導(dǎo)出DOM和DEM成果數(shù)據(jù)。
3.2.2 內(nèi)業(yè)成圖
使用清華山維軟件進(jìn)行內(nèi)業(yè)成圖,將DEM成果(DSM)和DOM導(dǎo)入清華山維軟件,建立三維模型,在三維模型上進(jìn)行內(nèi)業(yè)測圖,繪制地物、提取高程點(diǎn),將地物導(dǎo)出成cad格式,在cass里面整理出圖。
四、成果精度分析
4.1 空三精度評(píng)價(jià)指標(biāo)
區(qū)域網(wǎng)平差的精度通過野外觀測的檢查點(diǎn)進(jìn)行評(píng)定,根據(jù)解算出的外方位元素和檢查點(diǎn)的像點(diǎn)坐標(biāo),求出檢查點(diǎn)地面坐標(biāo)的解算值,計(jì)算與實(shí)測坐標(biāo)值的差值。檢查點(diǎn)的平面中誤差、高程中誤差分別按公式計(jì)算:
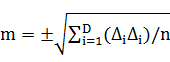
式中,m為檢查點(diǎn)中誤差;Δ_i為檢查點(diǎn)野外實(shí)測坐標(biāo)值與解算值的差值;n為檢查點(diǎn)的個(gè)數(shù)。
4.2精度評(píng)定
測區(qū)一(拉西瓦鎮(zhèn)測區(qū))飛行了兩個(gè)架次,每個(gè)架次4條航線,470張像片,影像航向重疊約77%,旁向重疊約62%。相對(duì)飛行高度為780米,航攝地面分辨率為0.12米,測區(qū)航線規(guī)劃圖如圖1。測區(qū)二(南干渠受水區(qū)林地典型地塊測區(qū))飛行4個(gè)架次,總共1193張照片,影像航向重疊約76%,旁向重疊約63%。相對(duì)飛行高度為750米,航攝地面分辨率為0.12米,測區(qū)航線規(guī)劃圖如圖2。
圖1 測區(qū)一航線規(guī)劃圖
圖2測區(qū)二航線規(guī)劃圖
2個(gè)測區(qū)的精度檢查結(jié)果如表1和表2所示
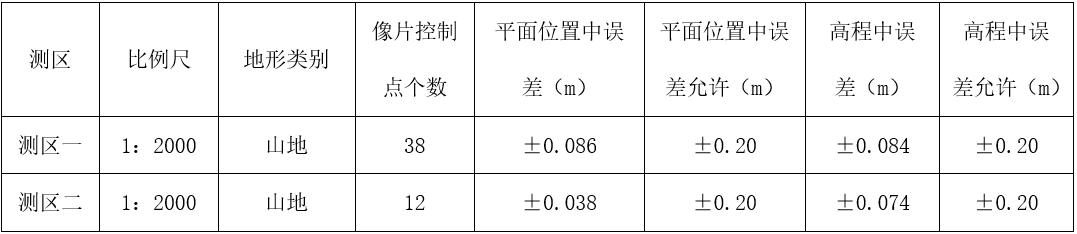
表4-1像控點(diǎn)精度統(tǒng)計(jì)
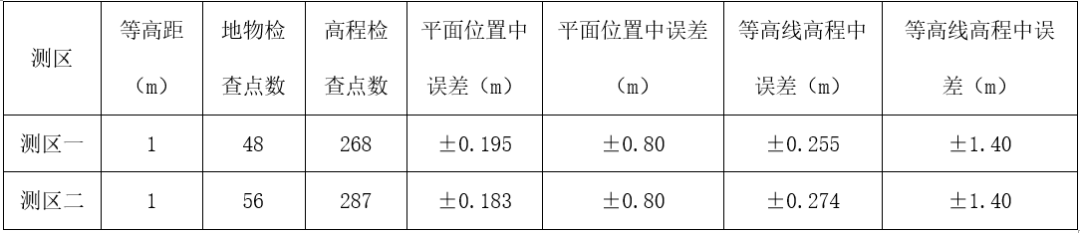
表4-2地形圖成果精度統(tǒng)計(jì)
由表1和表2可知,像控點(diǎn)精度滿足規(guī)范要求,每個(gè)測區(qū)都進(jìn)行了地形點(diǎn)和地物點(diǎn)的檢查,檢查結(jié)果滿足1:2000成圖要求。
五、經(jīng)驗(yàn)總結(jié)和結(jié)論
按《水利水電工程測量規(guī)范》(SL 197-2013)限差要求,本次成果滿足規(guī)范要求,達(dá)到了1:2000地形圖的精度指標(biāo)。本次成圖在短時(shí)間內(nèi)完成了較大的任務(wù),給水工、地質(zhì)等專業(yè)爭取了寶貴的時(shí)間,也為無人機(jī)航測技術(shù)積累了經(jīng)驗(yàn)。通過幾個(gè)測區(qū)的飛行任務(wù),得出以下的結(jié)論。
(1)無人機(jī)航攝技術(shù)的生產(chǎn)效率提高明顯,節(jié)約成本,提高了經(jīng)濟(jì)效益。
(2)前期控制測量需做好,像控點(diǎn)盡量布設(shè)均勻且保證足夠的密度。
(3)高精度DEM提取地貌數(shù)據(jù)的方法是可行的,極大的節(jié)約了人工成本。林地典型地塊DEM數(shù)據(jù)需進(jìn)行編輯,外業(yè)盡量多實(shí)測些地形點(diǎn),結(jié)合EPS內(nèi)業(yè)立體測圖軟件,使成果精度滿足規(guī)范要求。
(4)可以得到測區(qū)的DOM成果,測區(qū)地形地貌直觀的展現(xiàn)在其他專業(yè)人員面前,使其更方便的進(jìn)行設(shè)計(jì)。
-
數(shù)碼相機(jī)
+關(guān)注
關(guān)注
2文章
442瀏覽量
38985 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
626瀏覽量
29082 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10774瀏覽量
185945
原文標(biāo)題:無人機(jī)航測技術(shù)在引黃濟(jì)寧調(diào)水工程中的應(yīng)用
文章出處:【微信號(hào):feimarobotics2015,微信公眾號(hào):飛馬機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
愛普生M-G370PDS慣性測量單元在無人機(jī)導(dǎo)航中的應(yīng)用

石英晶振在無人機(jī)領(lǐng)域的應(yīng)用

無人機(jī)轟炸機(jī)場中使用的通信技術(shù)

科達(dá)嘉電感在無人機(jī)系統(tǒng)中的應(yīng)用
舵機(jī)在無人機(jī)中的作用
數(shù)字孿生調(diào)水工程數(shù)據(jù)采集解決方案
行者X500多旋翼無人機(jī)在地形測繪作業(yè)中的優(yōu)勢
MOS 管在無人機(jī)電池中的關(guān)鍵應(yīng)用

低空經(jīng)濟(jì)——無人機(jī)避撞技術(shù)
TRIZ理論在無人機(jī)造型設(shè)計(jì)上的應(yīng)用
激光測距傳感器在室內(nèi)無人機(jī)定位追蹤中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論