") 無(wú)人駕駛商業(yè)落地難點(diǎn)在于外部環(huán)境的復(fù)雜性
無(wú)人駕駛商業(yè)落地難點(diǎn)在于外部環(huán)境的復(fù)雜性

無(wú)人駕駛商業(yè)落地難點(diǎn)在于外部環(huán)境的復(fù)雜性。無(wú)人駕駛技術(shù)在運(yùn)營(yíng)領(lǐng)域取得突破性進(jìn)展可能是在2021年5G大規(guī)模應(yīng)用之后,主機(jī)廠要想把搭載L4級(jí)無(wú)人駕駛技術(shù)的車(chē)輛賣(mài)給消費(fèi)者,至少應(yīng)該在MEMS激光雷達(dá)在前裝車(chē)規(guī)模應(yīng)用后(預(yù)計(jì)2025年以后)。2018年國(guó)外車(chē)企無(wú)人駕駛水平可以做到L2-L3之間,個(gè)別車(chē)型達(dá)到L3級(jí)別;國(guó)內(nèi)大多數(shù)車(chē)企處在L1-L2的水平,部分車(chē)企已經(jīng)具備L2級(jí)無(wú)人駕駛的能力。2019年國(guó)內(nèi)大多數(shù)車(chē)企都會(huì)落地L2自動(dòng)駕駛技術(shù)。百度無(wú)人駕駛路測(cè)牌照質(zhì)量和數(shù)量雖然在國(guó)內(nèi)遙遙領(lǐng)先,但在加州其路測(cè)數(shù)據(jù)中MPD值落后Waymo兩個(gè)量級(jí)。
目前互聯(lián)網(wǎng)公司不具備量產(chǎn)汽車(chē)的能力,很難解決無(wú)人駕駛在執(zhí)行層面遇到的問(wèn)題,要么直接購(gòu)買(mǎi)汽車(chē)開(kāi)展運(yùn)營(yíng)業(yè)務(wù),要么專(zhuān)注于汽車(chē)大腦放棄造車(chē)。傳統(tǒng)車(chē)企有量產(chǎn)優(yōu)勢(shì),但也受制于安全性、成本壓力,整車(chē)廠主導(dǎo)的無(wú)人駕駛進(jìn)度應(yīng)該是逐步推進(jìn)的。如果只看整車(chē)廠和互聯(lián)網(wǎng)公司對(duì)無(wú)人駕駛的規(guī)劃,很容易認(rèn)為無(wú)人駕駛正在迅速到來(lái)。然而受傳感器和人工智能技術(shù)進(jìn)步的制約,無(wú)人駕駛的各種商業(yè)模式成熟度不一樣,規(guī)模化應(yīng)用的時(shí)間節(jié)點(diǎn)也不一致。正如科幻作家威廉?吉布森(William Gibson)所言:“未來(lái)已經(jīng)到來(lái)—只是分布并不十分均勻。”
一、無(wú)人駕駛發(fā)展歷程
1、無(wú)人駕駛汽車(chē)發(fā)展歷程
Google在2009年建立了由Thrun領(lǐng)導(dǎo)的無(wú)人駕駛汽車(chē)項(xiàng)目。2012年,自動(dòng)駕駛原型車(chē)開(kāi)始進(jìn)入美國(guó)公共道路,他們已經(jīng)行駛了數(shù)千萬(wàn)公里,也變得更加安全可靠。但這項(xiàng)技術(shù)離大規(guī)模部署還有一段距離。
圖1:國(guó)外無(wú)人駕駛汽車(chē)發(fā)展歷程

圖2:我國(guó)無(wú)人駕駛汽車(chē)發(fā)展歷程

來(lái)源:公開(kāi)資料整理
2、難點(diǎn)在于外部環(huán)境的復(fù)雜性
人類(lèi)駕駛的工具可以分為三類(lèi):車(chē),船,飛機(jī)。無(wú)人機(jī)、無(wú)人船并沒(méi)有引起大公司足夠的興趣,然而無(wú)人車(chē)從進(jìn)入大眾目光開(kāi)始,就挑起了巨頭們的強(qiáng)烈的興趣,原因有二:一,汽車(chē)數(shù)量大,市場(chǎng)萬(wàn)億級(jí),足以挑動(dòng)巨頭們的神經(jīng);三,汽車(chē)屬于高頻使用,無(wú)人車(chē)應(yīng)該會(huì)比無(wú)人機(jī)、無(wú)人船能為人類(lèi)節(jié)約更多時(shí)間,促進(jìn)生產(chǎn)效率的提升。
在介紹無(wú)人駕駛汽車(chē)之前,我們先回顧一下無(wú)人駕駛飛機(jī)的發(fā)展。飛機(jī)的無(wú)人駕駛早在1910年代就出現(xiàn)了,1930年代成熟,工程師把飛機(jī)的升降舵、副翼和方向舵與陀螺儀和高度計(jì)相連,飛機(jī)可以根據(jù)設(shè)定的方向和高度飛行。20世紀(jì)70年代,電子計(jì)算機(jī)進(jìn)入飛機(jī),從而實(shí)現(xiàn)了自動(dòng)化飛行。那么飛機(jī)飛行是否就可以不要駕駛員,而完全由計(jì)算機(jī)控制自動(dòng)完成飛行任務(wù)了呢?答案是不行。主要原因在于:飛機(jī)在起飛和降落這兩個(gè)階段中,變化因素太多,計(jì)算機(jī)只能按預(yù)先編好的程序動(dòng)作,不具備靈活反應(yīng)的能力;即使飛機(jī)在巡航狀態(tài)時(shí),駕駛員可以不做任何動(dòng)作去控制飛機(jī),但他必須監(jiān)視這個(gè)機(jī)器“大腦”的工作。萬(wàn)一這臺(tái)“大腦”出現(xiàn)什么故障或反應(yīng)不夠及時(shí),駕駛員要立刻接管駕駛飛機(jī)的任務(wù),這樣才能保證飛行安全。
飛機(jī)無(wú)人駕駛替代的是“飛行員看儀表指針并在指針偏離設(shè)定值時(shí)按固定動(dòng)作修正回來(lái)”的操作。之所以飛機(jī)能夠用于這個(gè)功能,因?yàn)樘炜诊w行和海洋航行、太空飛行一樣,在巡航階段的很多情況下并沒(méi)有什么“情況”。巡航階段即使發(fā)現(xiàn)情況,也不會(huì)立即發(fā)生事故,飛行員有時(shí)間接手處理。而汽車(chē)面對(duì)的交通場(chǎng)景是有車(chē)道線的公路,公路比天空和海洋里巡航階段要復(fù)雜太多,一旦發(fā)生偏離,幾乎立刻會(huì)發(fā)生事故,這也是汽車(chē)無(wú)人駕駛發(fā)展緩慢的原因。
無(wú)人車(chē)需要大量的傳感器,精確識(shí)別道路上的物體大小、速度、距離和方向,判斷道路方向、路面狀況,猜測(cè)物體下一步可能發(fā)生的運(yùn)動(dòng)改變并在緊急情況打破形式限制,將來(lái)甚至還需要在發(fā)生事故中知道如何選擇更輕微的事故方式。對(duì)于人來(lái)說(shuō)近乎本能的駕駛反應(yīng),對(duì)于無(wú)人車(chē)來(lái)說(shuō)則是大量傳感數(shù)據(jù)、綜合處理和算法積累。筆者認(rèn)為,如果當(dāng)前汽車(chē)駕駛面臨的復(fù)雜外部環(huán)境不變,面向私人消費(fèi)者的乘用車(chē)(VaaP)實(shí)現(xiàn)完全無(wú)人駕駛需要讓汽車(chē)大腦具備人腦面對(duì)突發(fā)情況時(shí)的推理和判斷能力。人類(lèi)只有進(jìn)入了一個(gè)人工智能高度成熟的時(shí)代,這種情況才可能實(shí)現(xiàn)。因此面向消費(fèi)者的乘用車(chē)完全無(wú)人駕駛離規(guī)模應(yīng)用還十分遙遠(yuǎn)。
二、國(guó)內(nèi)外無(wú)人駕駛水平對(duì)比
國(guó)際汽車(chē)工程師協(xié)會(huì)(SAE)制定的汽車(chē)智能化分級(jí)標(biāo)準(zhǔn),從駕駛操作、環(huán)境監(jiān)控、系統(tǒng)接管、應(yīng)用場(chǎng)景四個(gè)方面,SAE把汽車(chē)智能化分為L(zhǎng)0-L5五個(gè)等級(jí),如下圖所示:
圖3:無(wú)人駕駛等級(jí)劃分

來(lái)源:公開(kāi)資料整理
L4和L3的區(qū)別在于,L3在系統(tǒng)出問(wèn)題時(shí)需要人接管,而L4可以自己處理所有特殊情況。L4和L5的區(qū)別在于,L4只適用于特定場(chǎng)景,L5適用于所有場(chǎng)景。目前市面上在售的所有汽車(chē)幾乎都還處于組合功能輔助駕駛的階段。
1、主機(jī)廠車(chē)型對(duì)比
Tesla的Autopilot系統(tǒng)能夠?qū)esla電動(dòng)車(chē)具備的眾多L2功能,如AEB、ACC、LKS等有機(jī)結(jié)合起來(lái),實(shí)現(xiàn)了高速公路的無(wú)人駕駛。2018新款的奧迪A8搭載了名為“Traffic Jam Pilot”的特定條件的L3無(wú)人駕駛,解決的是特定場(chǎng)景-交通擁堵情況下的無(wú)人駕駛。從量產(chǎn)車(chē)的角度來(lái)看,全球現(xiàn)在只有一臺(tái)L3級(jí)別的自動(dòng)駕駛,奧迪全新A8。具備L2功能的自動(dòng)駕駛量產(chǎn)車(chē),到目前為止只有凱迪拉克CT6、特斯拉model s、x、3,沃爾沃S90、XC90,XC60、奧迪Q7、奔馳E級(jí)、日產(chǎn)第二代聆風(fēng)。國(guó)外主機(jī)廠無(wú)人駕駛水平可以做到L2-L3之間,個(gè)別車(chē)型達(dá)到L3級(jí)別。
國(guó)內(nèi)大多數(shù)車(chē)企目前處在L1-L2的水平,部分車(chē)企如小鵬、拜騰、蔚來(lái)、威馬等已經(jīng)具備L2級(jí)無(wú)人駕駛的能力,2019年國(guó)內(nèi)大多數(shù)車(chē)企都會(huì)落地L2自動(dòng)駕駛技術(shù)。
2、路測(cè)數(shù)據(jù)對(duì)比
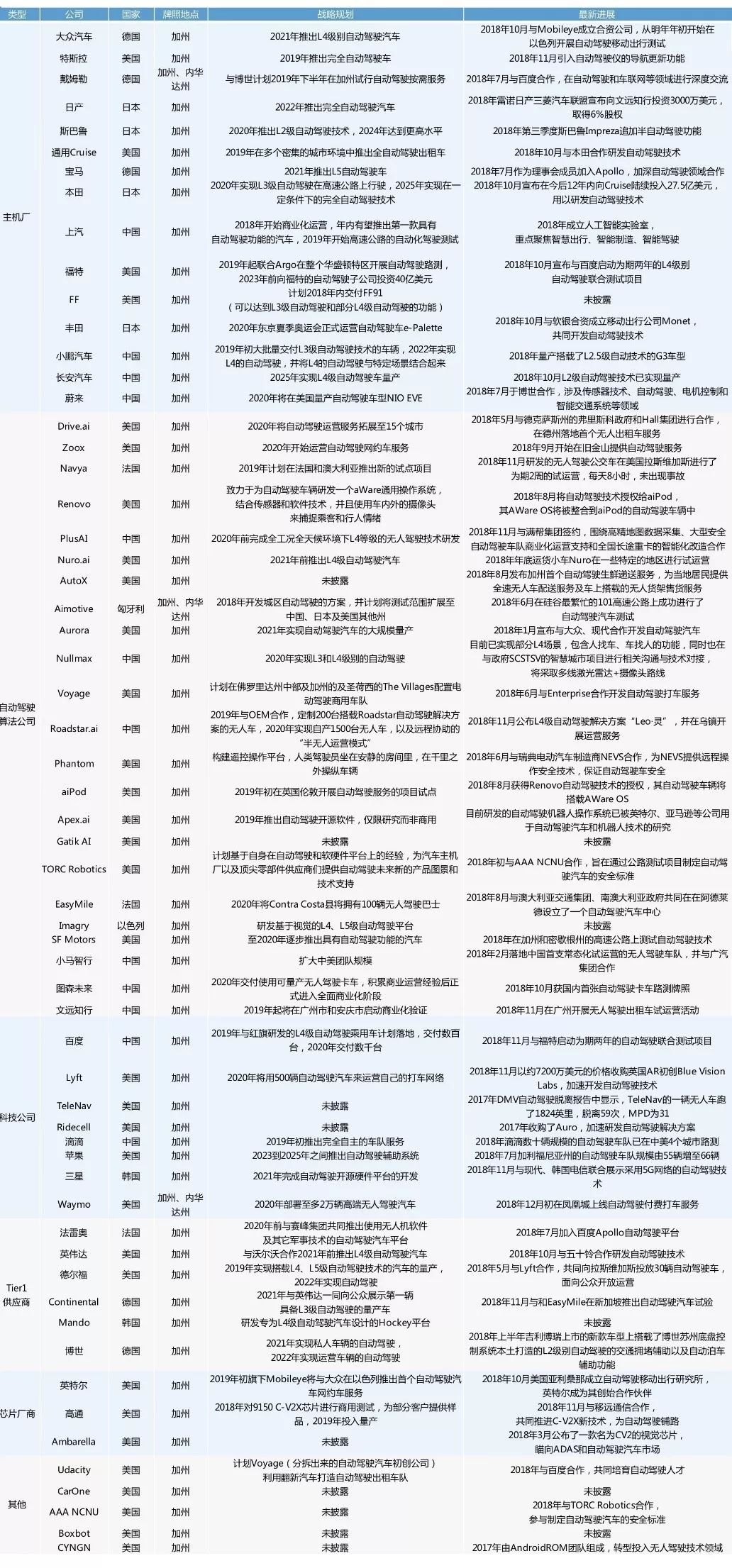
截至目前,已經(jīng)有60家企業(yè)取得了加州自動(dòng)駕駛路測(cè)牌照,其中美國(guó)本土企業(yè)數(shù)量32家,中國(guó)12家。取得中國(guó)自動(dòng)駕駛路測(cè)牌照的主機(jī)廠最多,占到了62%,第二名是互聯(lián)網(wǎng)公司,占據(jù)17%,自動(dòng)駕駛算法公司也占到了13%的份額。獲得美國(guó)加州自動(dòng)駕駛路測(cè)牌照的企業(yè)中,自動(dòng)駕駛算法企業(yè)占39%,主機(jī)廠占據(jù)了25%的份額,互聯(lián)網(wǎng)公司占據(jù)13%,還有一些Tier1供應(yīng)商和芯片廠商也在美國(guó)獲得了自動(dòng)駕駛路測(cè)牌照。
國(guó)內(nèi)申請(qǐng)牌照前,測(cè)試車(chē)輛和安全員分別要進(jìn)行5000公里以上的封閉測(cè)試場(chǎng)日常訓(xùn)練、至少50小時(shí)的培訓(xùn)訓(xùn)練。加州自動(dòng)駕駛路測(cè)牌照的獲取方式更為簡(jiǎn)單,只要繳納500萬(wàn)美元的保證金,按照加州車(chē)管局(DMV)的要求向其提交測(cè)試數(shù)據(jù),并滿(mǎn)足DMV對(duì)技術(shù)、公司資質(zhì)等方面的審核標(biāo)準(zhǔn),就可以拿到一張自動(dòng)駕駛路測(cè)牌照。以下為獲得中美兩國(guó)自動(dòng)駕駛牌照的企業(yè)以及相關(guān)情況。
圖5:獲得美國(guó)自動(dòng)駕駛牌照的企業(yè)

圖6:獲得中國(guó)自動(dòng)駕駛牌照的企業(yè)
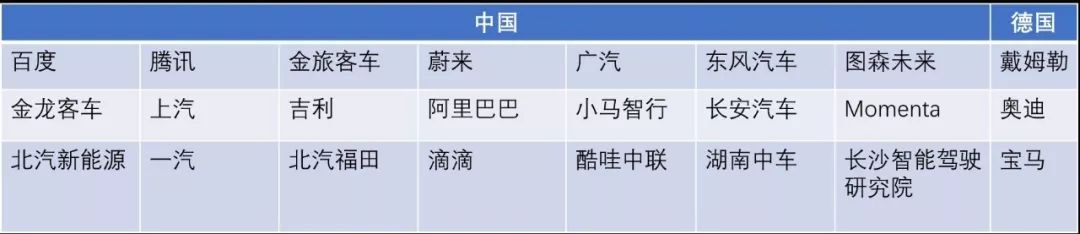
圖7:獲得自動(dòng)駕駛路測(cè)牌照的企業(yè)最新進(jìn)展
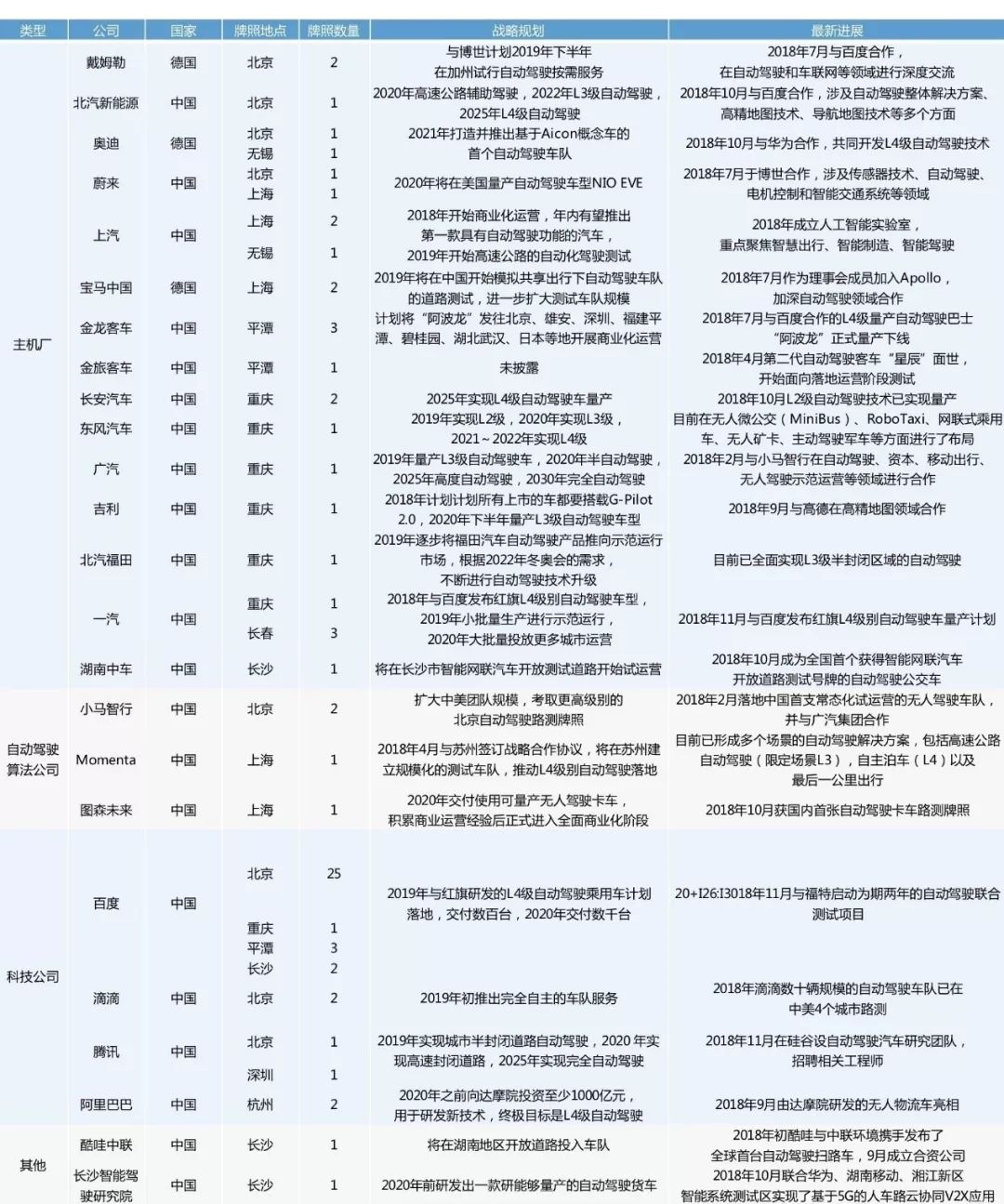
來(lái)源:億歐
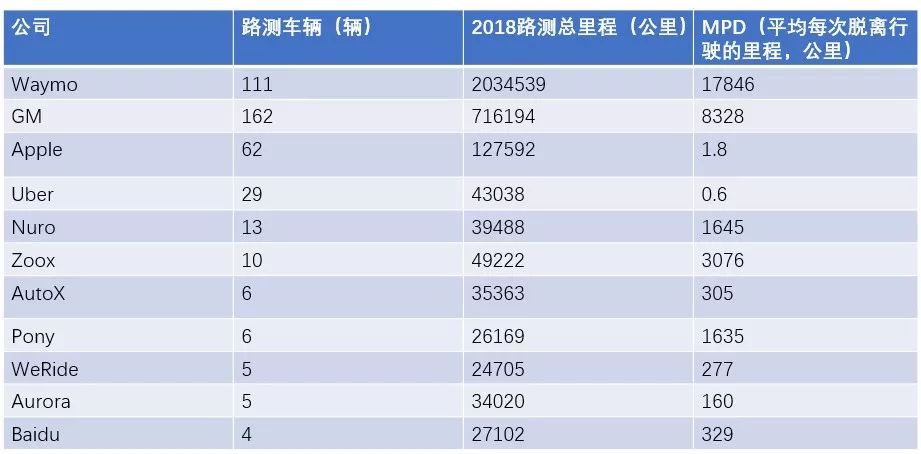
北京自動(dòng)駕駛測(cè)試試驗(yàn)用臨時(shí)號(hào)牌共分為T(mén)1至T5五個(gè)級(jí)別,T3代表著較高的技術(shù)級(jí)別,也是現(xiàn)階段業(yè)內(nèi)所能考到的最高級(jí)別,百度、小馬智行、智行者取得了T3牌照,其他企業(yè)均為T(mén)1。數(shù)量方面百度憑借29張自動(dòng)駕駛路測(cè)牌照遙遙領(lǐng)先。從DMV發(fā)布的2017自動(dòng)駕駛脫離報(bào)告來(lái)看,Waymo和通用的MPD值達(dá)到了同一個(gè)量級(jí),百度和Waymo相差兩個(gè)量級(jí)。根據(jù)麥肯錫的研究報(bào)告顯示,中國(guó)本土自動(dòng)技術(shù)在算法、訓(xùn)練數(shù)據(jù)上還需要2~3年的追趕時(shí)間。
圖8:DMV發(fā)布的2018自動(dòng)駕駛脫離報(bào)告情況(部分):
三、無(wú)人駕駛主流商業(yè)模式
無(wú)人駕駛主流商業(yè)模式有兩種,第一種是企業(yè)作為價(jià)值鏈的一部分,把車(chē)作為最后的產(chǎn)品,賣(mài)給私人消費(fèi)者(VaaP)。另一個(gè)商業(yè)模式,把無(wú)人駕駛技術(shù)應(yīng)用在服務(wù)的場(chǎng)景中,收取服務(wù)費(fèi)用,比如替代出租車(chē)司機(jī)的人力成本后,把每一次取得的項(xiàng)目費(fèi)用作為無(wú)人駕駛營(yíng)收(TaaS)。考慮到Waymo在2018年底在美國(guó)運(yùn)營(yíng)無(wú)人駕駛出租車(chē)業(yè)務(wù)時(shí)還配備安全員,無(wú)人駕駛技術(shù)在運(yùn)營(yíng)領(lǐng)域取得突破性進(jìn)展可能是在2021年5G大規(guī)模應(yīng)用之后,典型特征是Waymo完成一億公里路測(cè),一個(gè)安全員可以在后臺(tái)遠(yuǎn)程監(jiān)控甚至操作上千臺(tái)無(wú)人駕駛出租車(chē)。主機(jī)廠要想把搭載L4級(jí)無(wú)人駕駛技術(shù)的車(chē)輛賣(mài)給消費(fèi)者,至少應(yīng)該在MEMS激光雷達(dá)前裝規(guī)模應(yīng)用(預(yù)計(jì)2025年)以后,而且涉及到事故安全責(zé)任的問(wèn)題,極有可能只面向少數(shù)人群。
圖9:各家公司對(duì)L4的商業(yè)化計(jì)劃
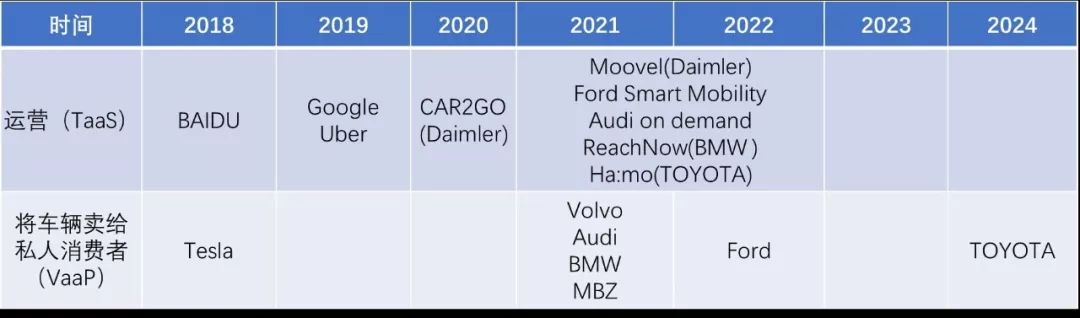
來(lái)源:公開(kāi)資料整理
1、TaaS模式:Waymo無(wú)人出租車(chē)業(yè)務(wù)缺乏安全考量
以Google、Uber等為代表的互聯(lián)網(wǎng)公司,通過(guò)安裝價(jià)格高昂的傳感器(激光雷達(dá)為主),獲得高質(zhì)量傳感器數(shù)據(jù),再通過(guò)大規(guī)模的路測(cè),積累海量數(shù)據(jù),鍛煉算法,讓汽車(chē)大腦更加聰明,從而“一步到位”地實(shí)現(xiàn)完全無(wú)人駕駛,從而顛覆整個(gè)出行行業(yè)甚至汽車(chē)產(chǎn)業(yè)。目前L4載貨業(yè)務(wù)已經(jīng)可以落地,載人業(yè)務(wù)在封閉區(qū)域低速行駛情況下(短距離接駁車(chē))也已經(jīng)可以落地。但是在開(kāi)放路況中,在人與車(chē)共享路權(quán)的情況下,要想實(shí)現(xiàn)出租車(chē)隊(duì)實(shí)現(xiàn)無(wú)人駕駛安全性,還需要足夠的路測(cè)和模擬仿真駕駛里程。
L4級(jí)別的業(yè)務(wù)競(jìng)爭(zhēng)壁壘在于數(shù)據(jù)積累和算法。目前的算法,除了將基本的交通規(guī)則寫(xiě)入算法外,在遇到各種交通規(guī)則不能覆蓋的路況時(shí),需要將路況信息記錄下來(lái),告訴汽車(chē)大腦,下次再遇到這種情況如何處理,本質(zhì)上類(lèi)似于人類(lèi)的經(jīng)驗(yàn)學(xué)習(xí)。這就給路測(cè)數(shù)據(jù)和仿真模擬數(shù)據(jù)有效性帶來(lái)了疑問(wèn),雖然路測(cè)數(shù)據(jù)積累越來(lái)越快,但如果汽車(chē)面對(duì)的外界環(huán)境沒(méi)發(fā)生本質(zhì)改變,比如Waymo是在限定的 25 個(gè)城市展開(kāi)道路測(cè)試,汽車(chē)大腦學(xué)到的經(jīng)驗(yàn)有可能是重復(fù)的,并沒(méi)有變聰明。
有資料顯示,人類(lèi)駕駛員平均每駕駛9656萬(wàn)公里會(huì)發(fā)生一起致命車(chē)禍。因此無(wú)人駕駛路測(cè)應(yīng)該不少于一億公里,此外還需要在計(jì)算機(jī)虛擬環(huán)境測(cè)試9億公里。谷歌是較早投入到無(wú)人駕駛技術(shù)研究的企業(yè),目前已經(jīng)在進(jìn)行無(wú)人出租車(chē)商業(yè)運(yùn)營(yíng),其Waymo產(chǎn)品的路測(cè)數(shù)據(jù)為1600萬(wàn)公里。按照Waymo的路測(cè)進(jìn)度, 2025年前路測(cè)數(shù)據(jù)能突破1億公里。Waymo 跑完第 1 個(gè) 100 萬(wàn)英里耗時(shí)整整 6 年,第 5 個(gè) 100 萬(wàn)英里只用了 4 個(gè)月;同時(shí)虛擬里程也從去年 17年10 月的 10 億英里迅速攀升至 18年2月的50 億英里。
圖10:Waymo數(shù)據(jù)積累曲線
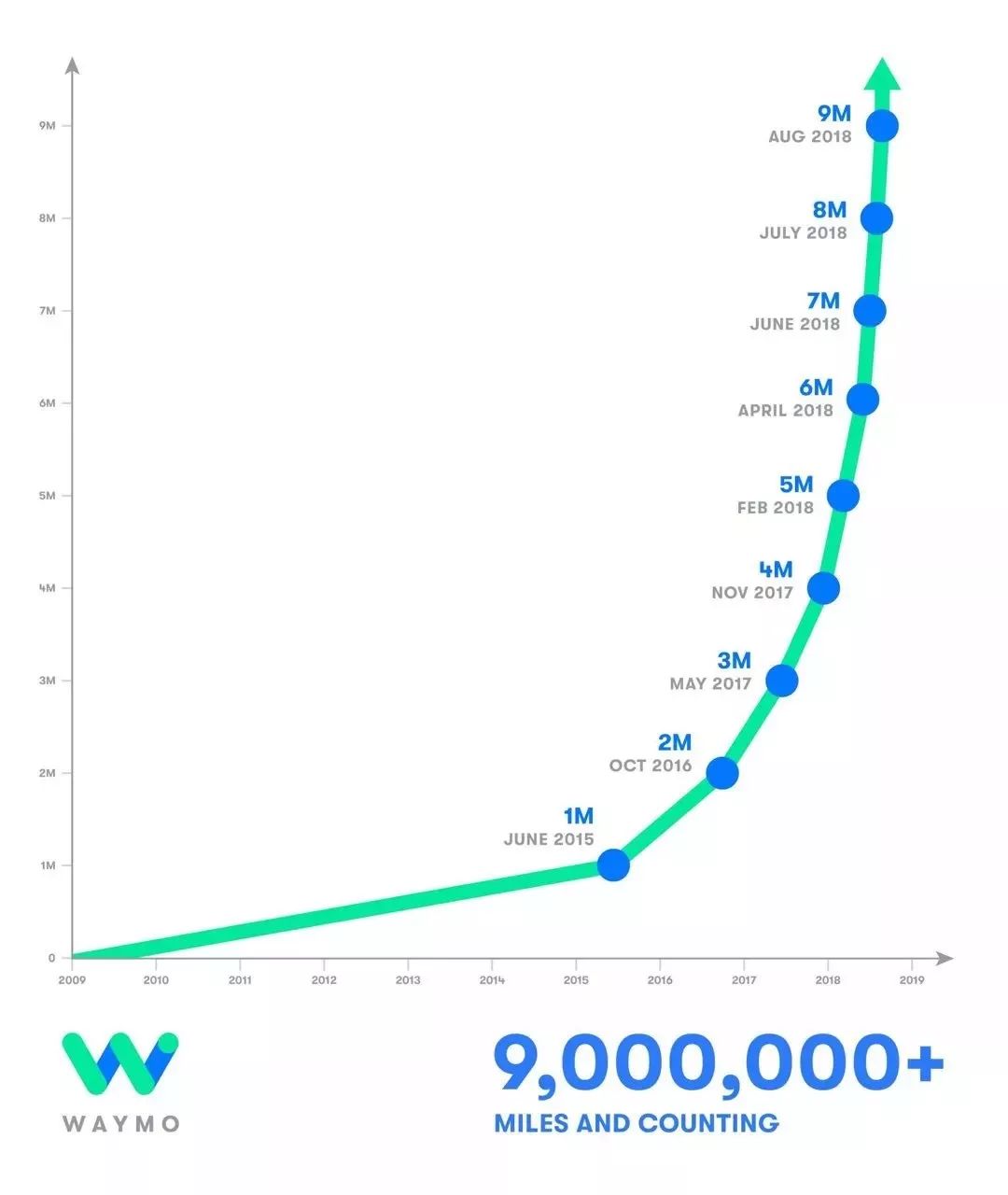
來(lái)源:公開(kāi)資料整理
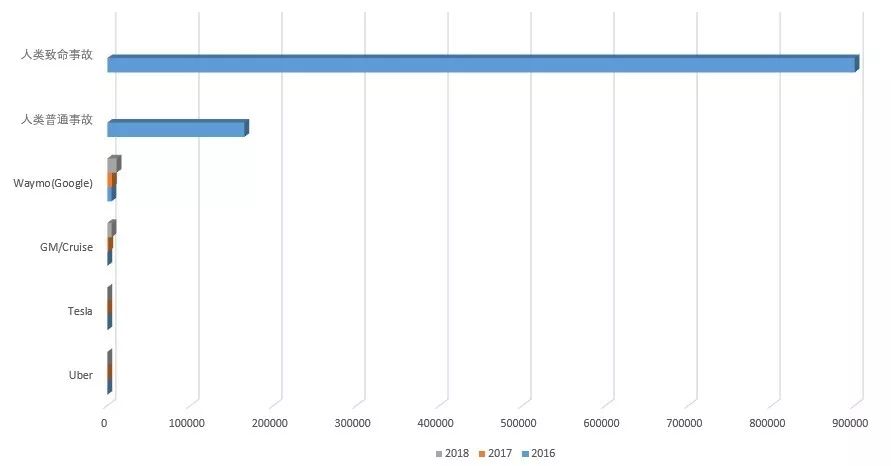
美國(guó)的人類(lèi)駕駛員每 165000 英里才出一起普通事故;每 90000000 英里才出現(xiàn)一起致死事故。從平均每次干預(yù)行駛的里程(MPD值)角度,Waymo經(jīng)歷從每 5000 英里( 2016 年)到 5596 英里( 2017 年)再到11153英里(2018年)干預(yù)一次的轉(zhuǎn)變,我們可以看出從2016年到2017年MPD提升的幅度很小,2017到2018年提升幅度卻很大。按照2018年的提升幅度有理由相信Waymo的MPD值在不久的將來(lái)能夠達(dá)到人類(lèi)水平,只是數(shù)據(jù)大幅提升的原因究竟是人工智能技術(shù)有升級(jí)還是汽車(chē)大腦已經(jīng)熟悉了路況尚不清楚,如果Waymo的汽車(chē)大腦已經(jīng)熟悉了平時(shí)訓(xùn)練的道路,在2018年MPD突然大幅提升也不是不可能。
圖11:MPD值對(duì)比
打造無(wú)人駕駛出租車(chē)隊(duì),有降低人力成本的好處,將來(lái)在廣告、贊助、車(chē)內(nèi)服務(wù)等新的商業(yè)模式上也可以進(jìn)行創(chuàng)新。但是中國(guó)無(wú)人駕駛環(huán)境復(fù)雜,人口稠密、混合交通、野蠻駕駛,人力成本相對(duì)低,如何能推行適合“本土化”的L4、L5無(wú)人駕駛技術(shù)是運(yùn)營(yíng)商需要考慮的重點(diǎn)。
預(yù)計(jì)未來(lái)無(wú)人駕駛出租車(chē)在城市運(yùn)營(yíng)有三種可實(shí)現(xiàn)路徑:1、為出租車(chē)建立專(zhuān)用“管道”,從而讓無(wú)人駕駛出租車(chē)面對(duì)的環(huán)境更加簡(jiǎn)單,這種管道可以是虛擬的高精度地圖加高精度定位,也可以是實(shí)際道路(各地正在興起的無(wú)人駕駛小鎮(zhèn)有可能會(huì)興建無(wú)人駕駛專(zhuān)用道路);2、借助后臺(tái)人員遠(yuǎn)程監(jiān)控操作無(wú)人駕駛車(chē)輛,當(dāng)無(wú)人駕駛車(chē)遇到不能決斷的情況時(shí),把控制權(quán)交給后臺(tái)人員(并不是嚴(yán)格意義上的L4);3、等待人工智能推理判斷能力的成熟,無(wú)人駕駛車(chē)輛能夠在和人共享路權(quán)的情況下,準(zhǔn)確判斷周?chē)说倪\(yùn)動(dòng)意圖(根據(jù)以上討論這種路徑在2025年前不太可能實(shí)現(xiàn))。
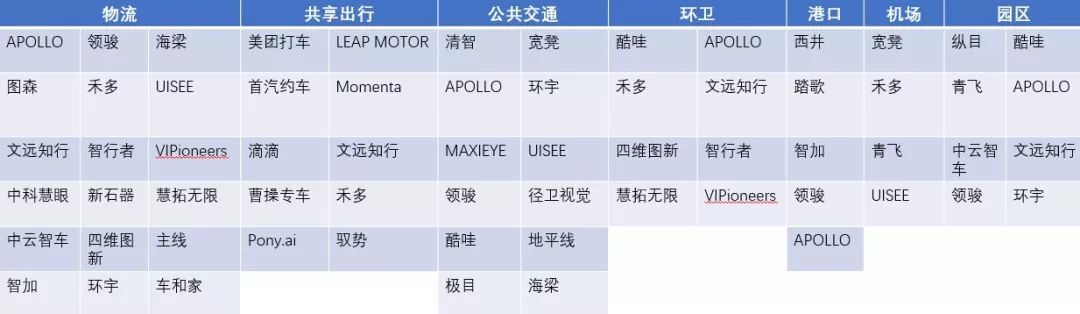
除了無(wú)人出租車(chē)隊(duì),我們現(xiàn)在也已經(jīng)能看到在特定場(chǎng)景的無(wú)人駕駛,包括港口、園區(qū)、安防、礦區(qū)、景區(qū)、機(jī)場(chǎng)、環(huán)衛(wèi)等。因?yàn)槭窃谔囟▓?chǎng)景,環(huán)境相對(duì)簡(jiǎn)單可控,在具備高精度地圖的情況下,對(duì)于感知和決策的算法要求就沒(méi)那么高,人工智能不需要面對(duì)多變的情況,現(xiàn)階段的人工智能已經(jīng)足以應(yīng)付這些場(chǎng)景,雖然這條技術(shù)路線的技術(shù)門(mén)檻并不高,但卻存在很多經(jīng)驗(yàn)性的技能,積累足夠的數(shù)據(jù)之后,就可以把產(chǎn)品服務(wù)性?xún)r(jià)比做到最好,從而形成競(jìng)爭(zhēng)優(yōu)勢(shì)。現(xiàn)階段就能落地的項(xiàng)目可以給企業(yè)帶來(lái)持續(xù)的現(xiàn)金流,不必為了做無(wú)人駕駛出租車(chē)隊(duì)去等待法律法規(guī)的開(kāi)放或者爭(zhēng)取有限的測(cè)試牌照進(jìn)行漫長(zhǎng)的路測(cè)。
圖12:國(guó)內(nèi)部分無(wú)人駕駛企業(yè)應(yīng)用場(chǎng)景
2、VaaP模式,主機(jī)廠采取逐步豐富有條件L3、L4的策略
將車(chē)輛賣(mài)給私人消費(fèi)者(VaaP)的主機(jī)廠,出于安全和成本考慮,會(huì)走循序漸進(jìn)的技術(shù)路線。奧迪、福特、通用、寶馬、豐田這樣的企業(yè)內(nèi)部都具備強(qiáng)大的技術(shù)積累,他們從幾十年前就開(kāi)始努力發(fā)展安全輔助駕駛。此外汽車(chē)一級(jí)供應(yīng)商(Tier1),大陸、博世、德?tīng)柛5纫舱莆樟撕芏嗟募夹g(shù)。2017年8月29日,德國(guó)科隆經(jīng)濟(jì)研究所(Cologne Institutefor Economic Research)檢索并分析了2010年至2017年7月期間的5839項(xiàng)自動(dòng)駕駛相關(guān)專(zhuān)利,以確定該領(lǐng)域的活躍公司。第一名既非汽車(chē)制造商,也非美國(guó)高科技公司,而是德國(guó)汽車(chē)部件供應(yīng)商博世。日本權(quán)威媒體與專(zhuān)利分析公司Patent Result合作,18年出了一份自動(dòng)駕駛專(zhuān)利競(jìng)爭(zhēng)力排名,排在第一的是谷歌Waymo、第二是豐田,前十名主要被美國(guó)和日本車(chē)企所占據(jù)。
圖13:無(wú)人駕駛專(zhuān)利數(shù)量對(duì)比
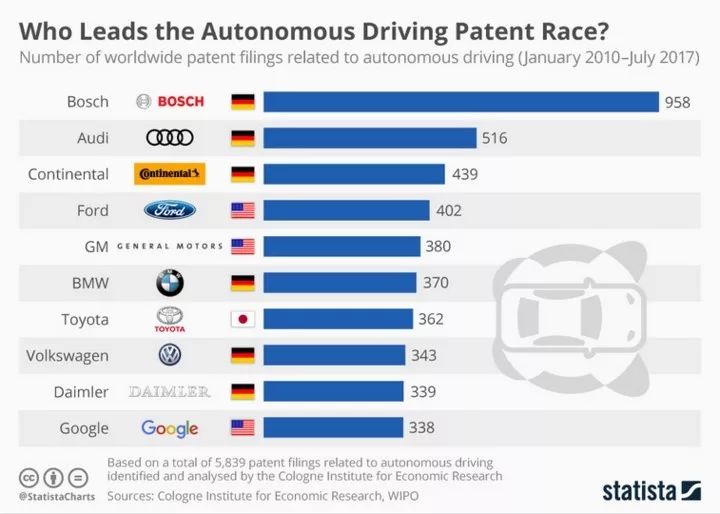

來(lái)源:公開(kāi)資料整理
未來(lái)全功能的L3還需要實(shí)現(xiàn)更多場(chǎng)景下的無(wú)人駕駛,比如高速公路上的自動(dòng)跟車(chē)、高速公路全速120公里自動(dòng)行駛、全自動(dòng)泊車(chē)(代客泊車(chē)),通過(guò)高頻使用場(chǎng)景的逐步無(wú)人化,最終實(shí)現(xiàn)Tier1主導(dǎo)的全功能的L3、 L4。現(xiàn)在的算法已經(jīng)足夠解決部分L3的問(wèn)題了,全功能的L3關(guān)鍵是傳感器性能還達(dá)不到場(chǎng)景需求,無(wú)法量產(chǎn)。
國(guó)內(nèi)各傳統(tǒng)整車(chē)廠對(duì)于無(wú)人駕駛技術(shù)的規(guī)劃較為激進(jìn),相對(duì)而言北汽的規(guī)劃更加實(shí)事求是。造車(chē)新勢(shì)力要比傳統(tǒng)車(chē)企更為激進(jìn)。比如,蔚來(lái)、拜騰都表示將于2020年實(shí)現(xiàn)L4級(jí)無(wú)人駕駛,車(chē)和家更是希望2019年就能出L4級(jí)樣車(chē)了。車(chē)企制定較為激進(jìn)的規(guī)劃是為了吸引消費(fèi)者注意,跟風(fēng)放“衛(wèi)星”。
表1:國(guó)內(nèi)主機(jī)廠無(wú)人駕駛規(guī)劃
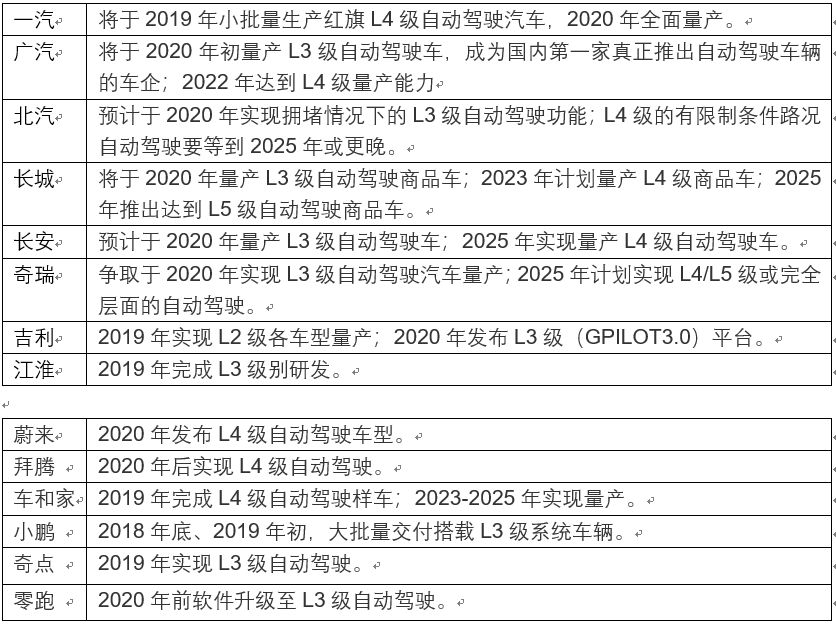
來(lái)源:公開(kāi)資料整理
面向消費(fèi)者的L4級(jí)別的乘用車(chē)勢(shì)必要用到中遠(yuǎn)程激光雷達(dá),目前MEMS激光雷達(dá)還沒(méi)有量產(chǎn),距離車(chē)規(guī)級(jí)應(yīng)用還需要一段時(shí)間,此外激光雷達(dá)成本過(guò)高也會(huì)延緩量產(chǎn)進(jìn)度。如果車(chē)企選擇不用MEMS激光雷達(dá),以Mobileye視覺(jué)技術(shù)為核心與GPS、IMU、超聲波、毫米波雷達(dá)等傳感器做深度融合,打造一款可在受限場(chǎng)景下穩(wěn)定運(yùn)行的無(wú)人車(chē)也是是可行的。但是這種技術(shù)路線由于沒(méi)有使用MEMS激光雷達(dá),數(shù)據(jù)精度和安全性都會(huì)下降。到時(shí)車(chē)企雖然號(hào)稱(chēng)配備了L4級(jí)的無(wú)人駕駛,但因?yàn)椴缓糜貌粫?huì)被私人消費(fèi)者接受,只能配在少數(shù)車(chē)型上。
四、競(jìng)爭(zhēng)分析
1、玩家背景分析:主機(jī)廠VS互聯(lián)網(wǎng)公司
玩家背景可以分為兩大類(lèi),一類(lèi)是硬件為主的主機(jī)廠,另一類(lèi)是軟件為主的互聯(lián)網(wǎng)公司。主機(jī)廠又可以分為傳統(tǒng)背景和新能源背景,傳統(tǒng)背景主要指燃油車(chē)時(shí)代形成的國(guó)際國(guó)內(nèi)主機(jī)廠,新能源背景主要指?jìng)鹘y(tǒng)汽車(chē)從業(yè)者或者創(chuàng)新型企業(yè)家在新能源變革的趨勢(shì)下,抓住機(jī)會(huì),將汽車(chē)新能源趨勢(shì)和智能化趨勢(shì)結(jié)合起來(lái)另立門(mén)戶(hù),代表企業(yè)有Tesla,蔚來(lái)汽車(chē)、小鵬汽車(chē),他們創(chuàng)業(yè)骨干來(lái)自國(guó)際國(guó)內(nèi)各大主機(jī)廠。以Tesla等為代表的新興公司,在傳感器上力求降低成本,在無(wú)人駕駛推進(jìn)上相當(dāng)激進(jìn)。
互聯(lián)網(wǎng)公司出身的創(chuàng)業(yè)團(tuán)隊(duì),國(guó)內(nèi)主要是指百度以及從百度出來(lái)的創(chuàng)業(yè)團(tuán)隊(duì),國(guó)外主要是指來(lái)自Google、Apple、Tesla、Uber的無(wú)人駕駛團(tuán)隊(duì)。按照學(xué)術(shù)背景創(chuàng)業(yè)團(tuán)隊(duì)又可以分為兩類(lèi),一類(lèi)是斯坦福、卡耐基梅隆、清華大學(xué)、中科院等計(jì)算機(jī)名校或者研究所的專(zhuān)家教授抓住計(jì)算機(jī)視覺(jué)技術(shù)成熟的趨勢(shì),對(duì)汽車(chē)進(jìn)行智能化改造。通過(guò)攝像頭,Mobileye的單目能夠提供L1的前車(chē)碰撞預(yù)警,肖建雄的AutoX,能實(shí)現(xiàn)L4級(jí)別的載貨應(yīng)用。另一類(lèi)是機(jī)器人背景的創(chuàng)業(yè)團(tuán)隊(duì),借助人工智能技術(shù)的進(jìn)步,對(duì)傳統(tǒng)工廠中的自動(dòng)導(dǎo)引車(chē)(AGV)進(jìn)行改造升級(jí)。COWAROBOT與環(huán)衛(wèi)龍頭“中聯(lián)環(huán)境”聯(lián)合開(kāi)發(fā)了無(wú)人駕駛掃地車(chē),未來(lái)有望開(kāi)發(fā)出在更加動(dòng)態(tài)、開(kāi)放環(huán)境中的快遞機(jī)器人、送餐機(jī)器人、跟隨載物機(jī)器人以及無(wú)人駕駛汽車(chē)。
圖14:國(guó)內(nèi)無(wú)人駕駛企業(yè)背景
來(lái)源:億歐
2、競(jìng)爭(zhēng)策略:聯(lián)盟、投資并購(gòu)、垂直整合
傳統(tǒng)車(chē)企有量產(chǎn)優(yōu)勢(shì),但也受制于安全性限制、成本壓力,導(dǎo)致無(wú)人駕駛進(jìn)度是逐步推進(jìn)。互聯(lián)網(wǎng)公司不具備量產(chǎn)汽車(chē)的能力,很難解決無(wú)人駕駛在執(zhí)行層面遇到的問(wèn)題,要么直接購(gòu)買(mǎi)汽車(chē)開(kāi)展運(yùn)營(yíng)業(yè)務(wù),要么專(zhuān)注于汽車(chē)大腦放棄造車(chē)。
無(wú)人駕駛技術(shù)涉及到的汽車(chē)本身、計(jì)算平臺(tái)(芯片)、雷達(dá)、攝像頭、高精地圖、通訊技術(shù)等眾多領(lǐng)域,這些技術(shù)不是哪一家企業(yè)單憑一己之力可以完全做到的。對(duì)此企業(yè)有三種應(yīng)對(duì)策略。
一是聯(lián)盟:在無(wú)人駕駛技術(shù)研發(fā)進(jìn)程中,技術(shù)生態(tài)圈的構(gòu)建會(huì)成為一大趨勢(shì)。當(dāng)前,市場(chǎng)上已經(jīng)出現(xiàn)了一些技術(shù)聯(lián)盟,如寶馬-英特爾-Mobileye、Uber-沃爾沃-戴姆勒、Lyft-通用-捷豹路虎、谷歌OAA聯(lián)盟,以及百度阿波羅平臺(tái)等。寶馬-英特爾-大陸-德?tīng)柛#璏obileye聯(lián)盟,寶馬負(fù)責(zé)駕駛控制、動(dòng)力學(xué)、整體功能性評(píng)估、原型車(chē)生產(chǎn)。英特爾負(fù)責(zé)解決從汽車(chē)到數(shù)據(jù)中心的計(jì)算能力,包括傳感器聚合、駕駛策略、環(huán)境建模、路徑規(guī)劃以及處理器、固態(tài)硬盤(pán)和人工智能平臺(tái)等訓(xùn)練和模擬基礎(chǔ)設(shè)施。Mobileye則擅長(zhǎng)計(jì)算機(jī)視覺(jué)處理,同時(shí)結(jié)合英特爾CPU和FPGA技術(shù)構(gòu)成的中央計(jì)算平臺(tái),集成到每一輛無(wú)人駕駛汽車(chē)中。而作為T(mén)ier1,德?tīng)柛Ec大陸的加入更多地扮演技術(shù)集成的角色,它們更擅長(zhǎng)將一堆部件結(jié)合成一套“總成”。
博世-百度-高德-四維圖新聯(lián)盟,相比上述陣容少了一個(gè)汽車(chē)制造商的角色。聯(lián)盟的牽頭者百度也并未想過(guò)自己造車(chē),而是選擇在其它主機(jī)廠現(xiàn)成的車(chē)輛上搭載一套無(wú)人駕駛系統(tǒng)。未來(lái)百度通過(guò)售賣(mài)無(wú)人駕駛系統(tǒng)或提供系統(tǒng)租賃和運(yùn)維服務(wù)。這種模式在傳統(tǒng)行業(yè)中已有案例。GE通過(guò)租賃航空公司發(fā)動(dòng)機(jī)實(shí)現(xiàn)商業(yè)運(yùn)營(yíng),發(fā)動(dòng)機(jī)實(shí)時(shí)和衛(wèi)星連接,將數(shù)據(jù)傳回至GE,后者對(duì)發(fā)動(dòng)機(jī)狀態(tài)及是否需要維護(hù)的情況一清二楚。在此合作中,百度主要提供高精地圖、自定位、增強(qiáng)現(xiàn)實(shí)、人機(jī)交互界面等核心技術(shù)。博世提供無(wú)人駕駛測(cè)試車(chē)的雷達(dá)和傳感器。
二是投資和并購(gòu):國(guó)外車(chē)企和其他巨頭與無(wú)人駕駛公司合作非常密切,甚至像通用(收購(gòu)Cruise),福特(收購(gòu)Argo),Uber(收購(gòu)otto),德?tīng)柛#ㄊ召?gòu)Ottomatika)等紛紛收購(gòu)了至少一家無(wú)人駕駛公司。而國(guó)內(nèi)的車(chē)企為什么沒(méi)有收購(gòu)初創(chuàng)公司的動(dòng)作?這是汽車(chē)產(chǎn)業(yè)成熟度的差異造成的。汽車(chē)制造作為百年工業(yè),發(fā)達(dá)國(guó)家的企業(yè)都經(jīng)歷了漫長(zhǎng)的技術(shù)積累周期,為了保持產(chǎn)品的優(yōu)勢(shì),很多新技術(shù)本身就是由他們提出的,已經(jīng)形成非常成熟的研發(fā)體系。現(xiàn)在世界上最頂級(jí)的一級(jí)供應(yīng)商里,德?tīng)柛T峭ㄓ玫牧慵庸荆娧b(denso)原是豐田的電氣安裝部門(mén),以此足見(jiàn)國(guó)外車(chē)企的技術(shù)強(qiáng)大。而國(guó)內(nèi)汽車(chē)市場(chǎng)興起時(shí),汽車(chē)的供應(yīng)鏈體系已經(jīng)很成熟,國(guó)內(nèi)市場(chǎng)爆發(fā)又快,車(chē)企把全部精力都放在占領(lǐng)市場(chǎng)上,技術(shù)都是直接拿來(lái)使用,幾乎沒(méi)有研發(fā)。現(xiàn)在雖然很多企業(yè)開(kāi)始重視研發(fā),但差距巨大短時(shí)間根本無(wú)法趕上。因此,國(guó)內(nèi)車(chē)企更像一個(gè)組裝廠,就算他們收購(gòu)或者找無(wú)人駕駛公司合作,自身也沒(méi)有足夠的技術(shù)能力支撐無(wú)人駕駛的技術(shù)需求。所以,在國(guó)內(nèi)與車(chē)企合作,更多需要提供一套完整的無(wú)人駕駛解決方案,這個(gè)挑戰(zhàn)比國(guó)外公司只用做好優(yōu)勢(shì)環(huán)節(jié)來(lái)說(shuō),要大太多。
三是垂直整合:少數(shù)公司也希望完全自主開(kāi)發(fā)電動(dòng)無(wú)人駕駛出租車(chē)解決方案。特斯拉就希望在該公司的高端電動(dòng)車(chē)上配備無(wú)人駕駛軟件,并組建“特斯拉網(wǎng)絡(luò)”專(zhuān)車(chē)服務(wù)。神秘汽車(chē)科技獨(dú)角獸Zoox也在開(kāi)發(fā)具備無(wú)人駕駛功能的電動(dòng)汽車(chē)。Alphabet旗下的Waze同樣在加州推出了拼車(chē)服務(wù),雖然與專(zhuān)車(chē)服務(wù)有所不同,但外界仍然懷疑該技術(shù)未來(lái)可能與Waymo的無(wú)人駕駛汽車(chē)整合。
圖15:目前在無(wú)人駕駛領(lǐng)域占得一席之地的車(chē)企、互聯(lián)網(wǎng)公司和各種解決方案供應(yīng)商
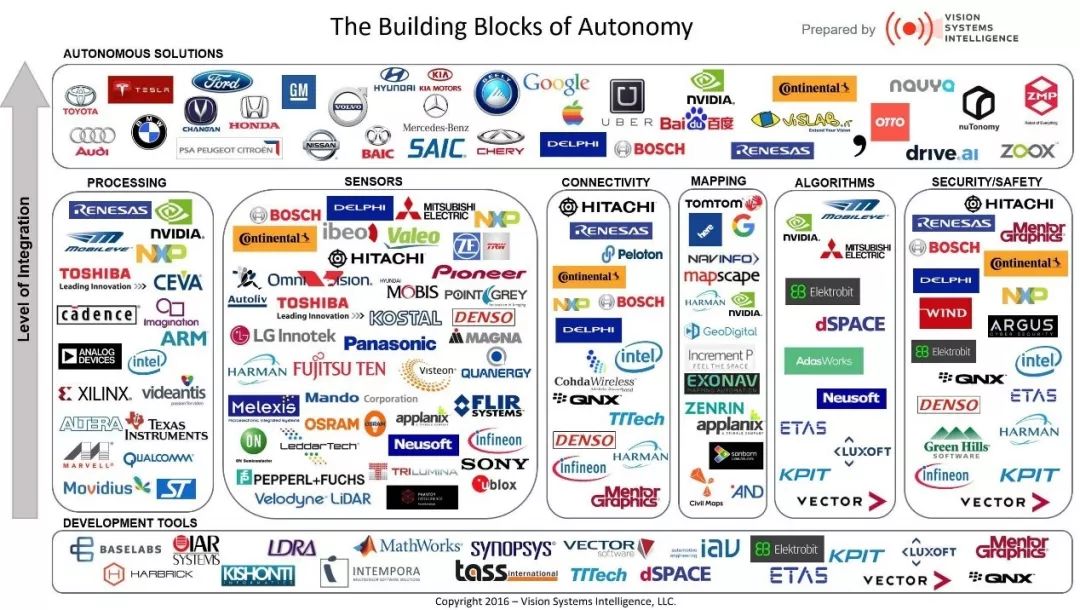
來(lái)源:Vision Systems Intelligence
五、無(wú)人駕駛面臨的技術(shù)困境:
感知和預(yù)測(cè)是較困難的部分
關(guān)于汽車(chē)電動(dòng)化智能化的思考:汽車(chē)發(fā)展的趨勢(shì)是什么?ACES(無(wú)人駕駛、聯(lián)網(wǎng)、電動(dòng)、共享汽車(chē))。為什么不能在燃油車(chē)上做無(wú)人駕駛?無(wú)人駕駛也是汽車(chē)電子產(chǎn)業(yè)的優(yōu)化升級(jí),未來(lái)隨著智能化程度的提升,整個(gè)無(wú)人駕駛系統(tǒng)所消耗的電量巨大,混動(dòng)和純電動(dòng)在這方面具有明顯優(yōu)勢(shì)。另一方面是燃油車(chē)發(fā)電機(jī)的底層控制算法相比于電機(jī)復(fù)雜太多,與其花大量時(shí)間在標(biāo)定和調(diào)試底層上,不如直接選用電動(dòng)車(chē)研究更高層的算法。為什么國(guó)內(nèi)外無(wú)人車(chē)出租車(chē)運(yùn)營(yíng)商目前采用的都是混動(dòng)車(chē)?當(dāng)前的無(wú)人駕駛出租車(chē)存在續(xù)航里程焦慮和智能化消耗電量大的特點(diǎn),純電動(dòng)無(wú)法滿(mǎn)足,等到將來(lái)鋰離子電池能量密度提高到新的檔次,純電動(dòng)車(chē)?yán)m(xù)航里程大幅提高,未來(lái)的無(wú)人駕駛新車(chē)型必然也是純電動(dòng)車(chē)。
我們可以把無(wú)人駕駛看做人工智能對(duì)汽車(chē)產(chǎn)業(yè)的升級(jí)改造,人工智能的發(fā)展依賴(lài)于四個(gè)基本要素:計(jì)算力、海量數(shù)據(jù)、算法與決策、以及傳感器的數(shù)據(jù)采集,而對(duì)于實(shí)現(xiàn)完全的無(wú)人駕駛同樣高度依賴(lài)于這四個(gè)基本要素,并且缺一不可。真正的完全無(wú)人駕駛汽車(chē)必須解決三個(gè)獨(dú)立的任務(wù):感知(了解周?chē)澜绨l(fā)生了什么)、預(yù)測(cè)(確定下一步會(huì)發(fā)生什么)和駕駛策略(采取適當(dāng)?shù)男袆?dòng))。谷歌無(wú)人車(chē)之父Thrun說(shuō),最后一個(gè)任務(wù)是最簡(jiǎn)單的,自動(dòng)駕駛中只有10%的問(wèn)題與之有關(guān),而感知和預(yù)測(cè)則是較困難的部分。
無(wú)人駕駛汽車(chē)通過(guò)攝像頭、毫米波雷達(dá)和激光雷達(dá)等傳感器來(lái)感知世界。傳感器的感知范圍雖然達(dá)到,甚至超過(guò)了人類(lèi)開(kāi)車(chē)時(shí)的感知范圍,但是性能遠(yuǎn)沒(méi)有達(dá)到人類(lèi)的判斷能力。人眼能夠輕松地識(shí)別200米外的車(chē)輛,在時(shí)速超過(guò)200kph的時(shí)候也不例外,但這對(duì)目前的攝像頭技術(shù)而言簡(jiǎn)直是不可完成的任務(wù)——200米外的車(chē)輛可能只是幾個(gè)像素點(diǎn)。同理,在中國(guó)目前不少車(chē)載攝像頭都無(wú)法準(zhǔn)確分辨限速標(biāo)志和限重標(biāo)志——那個(gè)t字實(shí)在太小了。雷達(dá)無(wú)法準(zhǔn)確判斷前方車(chē)輛的橫向位置,甚至無(wú)法分辨前方是一輛車(chē)還是兩輛車(chē)并排行駛。
激光雷達(dá)還面臨著高成本的問(wèn)題,目前機(jī)械式激光雷達(dá)的高成本主要源于生產(chǎn)中精密光學(xué)器件的校準(zhǔn)等繁瑣環(huán)節(jié),如果用固態(tài)器件替代,就能減少標(biāo)定過(guò)程的人工介入,降低人工和器件成本,LiDAR價(jià)格有望從上千乃至上萬(wàn)美元降低到數(shù)百美元。激光雷達(dá)的四條路線中MEMS和OPA的技術(shù)路線現(xiàn)在都還沒(méi)量產(chǎn)應(yīng)用,機(jī)械式和flashTOF方案已經(jīng)有量產(chǎn)使用,flashTOF方案主要在AGV小車(chē)、物流送貨小車(chē)和ADAS量產(chǎn)車(chē)型,測(cè)量距離30米以?xún)?nèi),屬于近程激光雷達(dá)。MEMS和OPA方案可以用在中遠(yuǎn)程(150-200m),機(jī)械式最遠(yuǎn)可以探測(cè)到250m以上。OPA方案十年后有可能是最好的方案,但是現(xiàn)在硅光子技術(shù)比MEMS還不成熟,OPA方案難點(diǎn)主要在相控陣芯片的研發(fā)上。傳統(tǒng)的機(jī)械式旋轉(zhuǎn)LIDAR在地圖領(lǐng)域的使用較為成熟,從發(fā)明出來(lái)到現(xiàn)在持續(xù)了10年左右的時(shí)間。而自動(dòng)駕駛領(lǐng)域的LIDAR應(yīng)用,是從2015年4月才開(kāi)始,大家普遍的觀點(diǎn)的是,LIDAR在車(chē)的大規(guī)模應(yīng)用方面,會(huì)在2025年。當(dāng)然,這也要看現(xiàn)在的這種LIDAR成本是否能夠降下來(lái)。
結(jié)合來(lái)自傳感器的數(shù)據(jù)后,汽車(chē)需要識(shí)別周?chē)奈矬w,機(jī)器必須通過(guò)大量仔細(xì)標(biāo)記的樣本訓(xùn)練過(guò)后才有這樣的能力。一輛車(chē)識(shí)別出周?chē)囊磺兄螅托枰⒖填A(yù)測(cè)未來(lái)幾秒會(huì)發(fā)生什么并決定如何應(yīng)對(duì)。無(wú)人駕駛車(chē)輛在應(yīng)對(duì)復(fù)雜環(huán)境方面還離人類(lèi)駕駛員還是有差距的,人類(lèi)駕駛員擅于處理一些意外情況,例如道路施工、拋錨的車(chē)輛、運(yùn)輸卡車(chē),緊急車(chē)輛、倒下的樹(shù)木或惡劣的天氣等。由于行人的前進(jìn)方向和速度都可以快速變化,再考慮其他車(chē)輛或基礎(chǔ)設(shè)施的遮擋問(wèn)題,面向行人的自動(dòng)緊急制動(dòng)或者轉(zhuǎn)向都是非常困難的事,所以?shī)W迪A8的L3自動(dòng)駕駛系統(tǒng),依然把使用場(chǎng)景限制在僅有車(chē)輛通行的封閉道路上。
現(xiàn)在被廣泛部署無(wú)人駕駛,仍然偶爾需要人的幫助。無(wú)人駕駛接駁車(chē)制造商N(yùn)avya的CEO Christophe Sapet舉了個(gè)例子:在一個(gè)兩車(chē)道的路上,無(wú)人駕駛汽車(chē)由于不敢越過(guò)道路中的實(shí)線而追尾了一輛拋錨的卡車(chē)。產(chǎn)生這種結(jié)果的原因,是自動(dòng)駕駛汽車(chē)被編程、被設(shè)定必須遵守交通規(guī)則(而不會(huì)隨機(jī)應(yīng)變)。但如果是人類(lèi),只要對(duì)面沒(méi)車(chē),就會(huì)壓過(guò)實(shí)線繞開(kāi)這輛卡車(chē)。Navya的無(wú)人駕駛車(chē)輛則會(huì)向遠(yuǎn)程監(jiān)督中心求助,人類(lèi)操作員可以看到車(chē)輛攝像頭拍攝的實(shí)時(shí)信號(hào)。遇到剛剛所說(shuō)的情況時(shí),操作人員在保證安全的情況下允許該車(chē)壓過(guò)實(shí)線行駛。Thrun預(yù)測(cè),這些操作員在未來(lái)可能會(huì)一次監(jiān)控?cái)?shù)千輛自動(dòng)駕駛車(chē)。
在無(wú)人駕駛時(shí)代,車(chē)輛與車(chē)輛、車(chē)輛與基站、車(chē)輛與行人等之間的交互能力也至關(guān)重要。這對(duì)車(chē)聯(lián)網(wǎng)的建設(shè)、IOT的普及和5G無(wú)線網(wǎng)絡(luò)等提出了極高要求。V2I(車(chē)對(duì)基礎(chǔ)設(shè)備)技術(shù),政策,法規(guī)的落地都超出了汽車(chē)行業(yè)本身的范疇,這是一個(gè)復(fù)雜的系統(tǒng)工程。比如要實(shí)現(xiàn)全自動(dòng)泊車(chē),就必然要求對(duì)停車(chē)場(chǎng)的通信設(shè)施進(jìn)行重建,這也是無(wú)人駕駛落地的一個(gè)障礙。
六、商業(yè)模式成熟時(shí)間表:
載貨先于載人,簡(jiǎn)單環(huán)境先于復(fù)雜環(huán)境
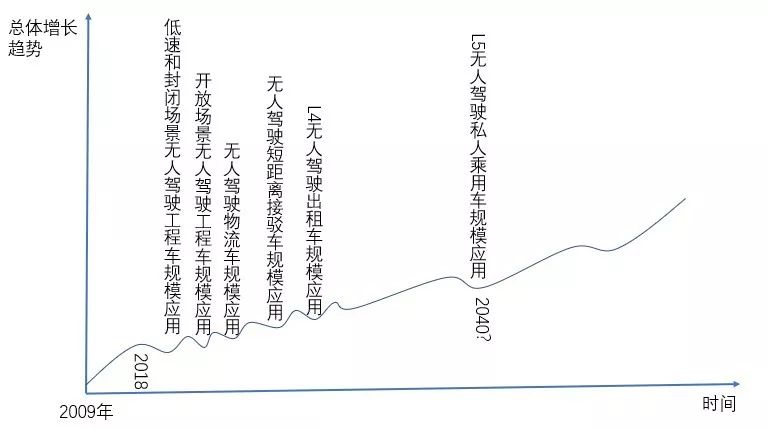
Mobileye實(shí)現(xiàn)了攝像頭的智能化,但是中遠(yuǎn)程車(chē)規(guī)級(jí)激光雷達(dá)還沒(méi)有在前裝乘用車(chē)上規(guī)模應(yīng)用,因此VaaP模式當(dāng)前還處在傳感器智能化的階段,隨后才是細(xì)分場(chǎng)景算法的依次成熟,最后是汽車(chē)軟件的統(tǒng)一標(biāo)準(zhǔn)。TaaS各類(lèi)商業(yè)模式正在積累數(shù)據(jù),根據(jù)載貨的商業(yè)模式先于載人的商業(yè)模式成熟,外界環(huán)境簡(jiǎn)單的商業(yè)模式先于外界環(huán)境復(fù)雜的商業(yè)模式成熟,可以判斷低速封閉場(chǎng)景的無(wú)人駕駛工程車(chē)、開(kāi)放場(chǎng)景無(wú)人駕駛工程車(chē)、無(wú)人駕駛物流車(chē)、L4級(jí)無(wú)人駕駛出租車(chē)將先后實(shí)現(xiàn)規(guī)模化應(yīng)用。L5級(jí)無(wú)人駕駛私人乘用車(chē)要實(shí)現(xiàn)規(guī)模化應(yīng)用至少應(yīng)該在20年后。
簡(jiǎn)單粗暴地使用高精度地圖+高精度定位,現(xiàn)在就可以實(shí)現(xiàn)某些特定場(chǎng)景下的L4無(wú)人駕駛。這里的高精度地圖可以理解為一個(gè)“管道”,無(wú)人車(chē)只要保證自己在“管道”內(nèi)行駛即可(參考waymo的綠色“管道”)。使用高精度定位,告訴車(chē)在管道的哪個(gè)地方,就可以自動(dòng)駕駛。馭勢(shì)科技和白云機(jī)場(chǎng)合作開(kāi)發(fā)的無(wú)人駕駛車(chē)在機(jī)場(chǎng)這種特定場(chǎng)景完全就可以使用這種方法。而且通過(guò)圖片可以看出這車(chē)裝了差分GPS,如果再加上RTK設(shè)備,就是可以達(dá)到戶(hù)外厘米級(jí)的定位。在一些礦區(qū),也有機(jī)器人在代替人類(lèi)去控制高大的礦車(chē),這些demo進(jìn)入特定場(chǎng)景后如果能夠快速的積累數(shù)據(jù)完成產(chǎn)品的迭代更新,他們很快就會(huì)為這些場(chǎng)景帶來(lái)巨大的變化。在特定場(chǎng)景中的無(wú)人駕駛實(shí)現(xiàn)難度沒(méi)有那么大,在這個(gè)賽道上的創(chuàng)業(yè)公司會(huì)借助資本的力量跑馬圈地。
奧迪A8搭配的是有限條件下的的L3,未來(lái)國(guó)外的Tier1和主機(jī)廠巨頭,會(huì)逐步豐富有限制L3的場(chǎng)景,從而實(shí)現(xiàn)接近無(wú)限制的L3、L4應(yīng)用。考慮到2018、2019年乘用車(chē)市場(chǎng)的低迷,Tier1和主機(jī)廠巨頭在研發(fā)這些場(chǎng)景下對(duì)應(yīng)得功能時(shí)更多的會(huì)考慮到成本問(wèn)題,再加上新式傳感器的車(chē)規(guī)級(jí)應(yīng)用需要較長(zhǎng)的研發(fā)時(shí)間,由主機(jī)廠主導(dǎo)的賣(mài)給私人消費(fèi)者的無(wú)人駕駛乘用車(chē)(VaaP)會(huì)逐漸豐富功能穩(wěn)步推進(jìn)。
圖16:無(wú)人駕駛商業(yè)模式先后成熟
七、投資機(jī)會(huì)關(guān)注
傳感器智能化公司:無(wú)論是從汽車(chē)安全或駕乘體驗(yàn)提升的角度講,感知環(huán)節(jié)都是產(chǎn)業(yè)升級(jí)中的最先受益者,傳感器決定著數(shù)據(jù)采集的質(zhì)量,傳感器智能化汽車(chē)智能化的基礎(chǔ)。
限定場(chǎng)景下的自動(dòng)駕駛技術(shù)公司:可能的限定場(chǎng)景如:封閉/半封閉區(qū)域、低速/高速狀態(tài)、有軌交通、特種車(chē)輛等。
國(guó)中創(chuàng)投已經(jīng)在無(wú)人駕駛產(chǎn)業(yè)投資了多家優(yōu)質(zhì)企業(yè),包括融合決策、視覺(jué)傳感器、毫米波雷達(dá)、高精度GPS、車(chē)載語(yǔ)音識(shí)別、車(chē)載HUD等領(lǐng)域,未來(lái)還會(huì)在該領(lǐng)域進(jìn)行更加精細(xì)化的布局。
八、風(fēng)險(xiǎn)提示
技術(shù)的不確定性:光學(xué)相共振激光雷達(dá)(OPA)技術(shù)、人工智能推理能力、人機(jī)交互技術(shù)、低功耗人工智能芯片、云平臺(tái)、5G通信與NB-IoT移動(dòng)物聯(lián)網(wǎng)的產(chǎn)品落地都會(huì)影響無(wú)人駕駛各種商業(yè)模式規(guī)模應(yīng)用的時(shí)間,無(wú)人駕駛產(chǎn)業(yè)進(jìn)度可能不及預(yù)期。
來(lái)自Waymo的競(jìng)爭(zhēng)壓力:美國(guó)當(dāng)?shù)貢r(shí)間2019年1月22日,全球自動(dòng)駕駛領(lǐng)頭羊Waymo官方正式宣布,在美國(guó)汽車(chē)工業(yè)重鎮(zhèn)密歇根州,建立世界上第一家100%致力于L4自動(dòng)駕駛汽車(chē)大規(guī)模生產(chǎn)的工廠。這家工廠是一家改裝廠,而不是真正意義的汽車(chē)生產(chǎn)工廠。Waymo自行開(kāi)發(fā)自動(dòng)駕駛所需要的硬件和軟件需要部署到Waymo所購(gòu)買(mǎi)的車(chē)輛上。工廠的建立,是為了解決這個(gè)關(guān)鍵問(wèn)題。領(lǐng)頭羊與跟隨者的距離正在拉大。美國(guó)的自動(dòng)駕駛公司,以及中國(guó)的自動(dòng)駕駛公司都會(huì)面臨這樣一個(gè)問(wèn)題,一旦Waymo開(kāi)放技術(shù),是否還需要、還值得、還應(yīng)該在這個(gè)領(lǐng)域深耕。
估值泡沫破裂:此前,摩根士丹利將通用Cruise的估值,從最近的本田投后145億美元,下調(diào)到90億美元,因?yàn)镃ruise的發(fā)展不及預(yù)期。主要是對(duì)其2019年是否能夠商業(yè)化的擔(dān)憂,畢竟Waymo的商業(yè)化也遇到了問(wèn)題。實(shí)際上,自動(dòng)駕駛初創(chuàng)公司的估值下滑,尤其是中國(guó)的自動(dòng)駕駛初創(chuàng)公司的估值下滑,在2018年底就已經(jīng)開(kāi)始了。中國(guó)的自動(dòng)駕駛初創(chuàng)公司,在2019年會(huì)面臨著洗牌的局面,技術(shù)能力不行的團(tuán)隊(duì)、資金鏈斷了的團(tuán)隊(duì)率先出局。投資人也面臨著選擇,是選擇繼續(xù)高估值押注,還是選擇泡沫過(guò)去再進(jìn)場(chǎng)。
-
無(wú)人駕駛
+關(guān)注
關(guān)注
99文章
4173瀏覽量
123509 -
waymo
+關(guān)注
關(guān)注
2文章
314瀏覽量
25158
原文標(biāo)題:無(wú)人駕駛汽車(chē):未來(lái)已來(lái),只是分布并不均勻
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
PIX RoboBus無(wú)人駕駛小巴落地深圳
智行者科技無(wú)人駕駛小巴落地海南

什么是低速無(wú)人駕駛,讓你一分鐘秒懂 #無(wú)人駕駛 #5g無(wú)人駕駛 #低速無(wú)人駕駛
無(wú)人駕駛技術(shù)未來(lái)在哪里?低速才是突破口

內(nèi)蒙古首個(gè)超百臺(tái)增程式無(wú)人駕駛礦卡項(xiàng)目落地
易控智駕發(fā)布礦山無(wú)人駕駛應(yīng)用落地成果
為什么聊自動(dòng)駕駛的越來(lái)越多,聊無(wú)人駕駛的越來(lái)越少?

“全球 Robotaxi 第一股” 文遠(yuǎn)知行:榮登 2024 中國(guó)無(wú)人駕駛商業(yè)化先鋒 TOP10

全球首個(gè)海拔5000米高原露天礦無(wú)人駕駛成果發(fā)布
一桿有AI的路燈:感知環(huán)境監(jiān)測(cè)路況還能“對(duì)話”無(wú)人駕駛AI燈桿屏






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論