") 一種新的帶有不確定性的邊界框回歸損失,可用于學(xué)習(xí)更準(zhǔn)確的目標(biāo)定位
一種新的帶有不確定性的邊界框回歸損失,可用于學(xué)習(xí)更準(zhǔn)確的目標(biāo)定位
全球計(jì)算機(jī)視覺三大頂級(jí)會(huì)議之一 CVPR 2019 將于當(dāng)?shù)貢r(shí)間 6 月 16-20 日在美國洛杉磯舉辦。屆時(shí),曠視首席科學(xué)家、研究院院長孫劍博士將帶領(lǐng)團(tuán)隊(duì)遠(yuǎn)赴盛會(huì),助力計(jì)算機(jī)視覺技術(shù)的交流與落地。在此之前,曠視每周都會(huì)介紹一篇被 CVPR 2019 接收的論文,本文是第 6篇,提出了一種新的帶有不確定性的邊界框回歸損失,可用于學(xué)習(xí)更準(zhǔn)確的目標(biāo)定位。

論文名稱:Bounding Box Regression with Uncertainty for Accurate Object Detection
論文鏈接:https://arxiv.org/abs/1809.08545
導(dǎo)語
簡介
方法
邊界框參數(shù)化
使用KL損失的邊界框回歸
方差投票
實(shí)驗(yàn)
消融實(shí)驗(yàn)
準(zhǔn)確的目標(biāo)檢測
在PASCAL VOC 2007上的實(shí)驗(yàn)
結(jié)論
參考文獻(xiàn)
往期解讀
導(dǎo)語
大規(guī)模目標(biāo)檢測數(shù)據(jù)集會(huì)盡可能清晰地定義基本 ground truth 邊界框。但是,可以觀察到在標(biāo)記邊界框時(shí)仍會(huì)存在模糊不清的現(xiàn)象。曠視研究院在本文中提出了一種全新的邊界框回歸損失,可用于同時(shí)學(xué)習(xí)邊界框變換和定位方差。這種新?lián)p失能極大地提升多種架構(gòu)的定位準(zhǔn)確度,而且?guī)缀醪粫?huì)有額外的計(jì)算成本。所學(xué)習(xí)到的定位方差也能幫助在非極大值抑制(NMS)期間融合相鄰的邊界框,進(jìn)一步提升定位的效果。實(shí)驗(yàn)結(jié)果表明這種新方法比之前最佳的邊界框優(yōu)化方法更優(yōu)。曠視研究院已公開相關(guān)代碼和模型:github.com/yihui-he/KL-Loss
簡介
ImageNet、MS-COCO 和 CrowdHuman 等大規(guī)模目標(biāo)檢測數(shù)據(jù)集都會(huì)盡可能清晰地定義基本 ground truth 邊界框。
但是,可以觀察到一些案例中的基本 ground truth 邊界框原本就是模糊的,這會(huì)讓邊界框回歸函數(shù)的學(xué)習(xí)更加困難。圖 1 (a)(c) 是 MS-COCO 中兩個(gè)邊界框標(biāo)記不準(zhǔn)確的示例。當(dāng)存在遮擋時(shí),邊界框的范圍會(huì)更不清晰,比如來自 YouTube-BoundingBoxes 的圖 1(d)。
圖 1:邊界框標(biāo)注模糊的示例。(a,c) 是標(biāo)注不準(zhǔn)確,(b) 是存在遮擋,(d) 則是因?yàn)檎趽鯇?dǎo)致目標(biāo)邊界框本身并不清晰
目標(biāo)檢測是一種多任務(wù)學(xué)習(xí)問題,包含目標(biāo)定位和目標(biāo)分類。當(dāng)前最佳的目標(biāo)檢測器(比如 Faster RCNN、Cascade R-CNN 和 Mask R-CNN)都依靠邊界框回歸來定位目標(biāo)。
但是,傳統(tǒng)的邊界框回歸損失(即平滑 L1 損失)沒有考慮到基本 ground truth 邊界框的模糊性。此外,人們通常假設(shè)當(dāng)分類分?jǐn)?shù)較高時(shí),邊界框回歸是準(zhǔn)確的,但事實(shí)并非總是如此,如圖 2 所示。
圖 2:VGG-16 Faster RCNN 在 MS-COCO 上的失敗案例。(a) 兩個(gè)邊界框都不準(zhǔn)確;(b)有較高分類分?jǐn)?shù)的邊界框的左邊界是不準(zhǔn)確的。
針對(duì)這些問題,本文提出了一種全新的邊界框回歸損失——KL 損失,用于同時(shí)學(xué)習(xí)邊界框回歸和定位的不確定性。具體來說,為了獲取邊界框預(yù)測的不確定性,研究員首先將邊界框預(yù)測和基本 ground truth 邊界框分別建模為高斯分布(Gaussian distribution)和狄拉克 δ 函數(shù)(Dirac delta function)。而新提出的邊界框回歸損失則被定義為預(yù)測分布和基本 ground truth 分布之間的 KL 距離。
使用 KL 損失進(jìn)行學(xué)習(xí)有三大優(yōu)勢:
可以成功獲取數(shù)據(jù)集中的模糊性。讓邊界框回歸器在模糊邊界框上得到的損失更小。
所學(xué)習(xí)到的方差可用于后處理階段。研究者提出了方差投票(variance voting)方法,可在非極大值抑制(NMS)期間使用由預(yù)測的方差加權(quán)的臨近位置來投票得到邊界框的位置。
所學(xué)習(xí)到的概率分布是可解釋的。因?yàn)槠浞从沉诉吔缈蝾A(yù)測的不確定性,所以可能有助于自動(dòng)駕駛和機(jī)器人等下游應(yīng)用。
方法
下面將具體介紹這種新的損失函數(shù)和方差投票方法。
邊界框參數(shù)化
在介紹新方法之前,先看看邊界框參數(shù)化。本文提出基于 Faster R-CNN 或 Mask R-CNN 等兩級(jí)式目標(biāo)檢測器(如圖 3)分別回歸邊界框的邊界。研究者將邊界框表示成了一個(gè)四維向量,其中每一維都是框邊界的位置。本文采用的參數(shù)化方案是 (x1, y1, x2, y2) 坐標(biāo)(對(duì)角線),而非 R-CNN 使用的那種 (x, y, w, h) 坐標(biāo)。
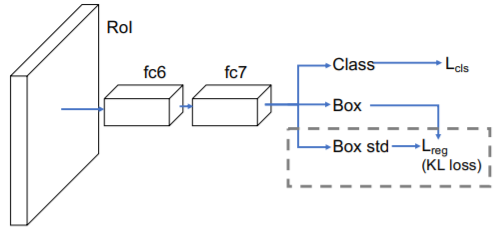
圖 3:本文提出的用于估計(jì)定位置信度的網(wǎng)絡(luò)架構(gòu)。不同于兩級(jí)式檢測網(wǎng)絡(luò)的標(biāo)準(zhǔn) Fast R-CNN head,這個(gè)架構(gòu)是估計(jì)邊界框位置以及標(biāo)準(zhǔn)差,這會(huì)在新提出的 KL 損失得到考慮。
該網(wǎng)絡(luò)的目標(biāo)是在估計(jì)位置的同時(shí)估計(jì)定位置信度。形式上講,該網(wǎng)絡(luò)預(yù)測的是一個(gè)概率分布,而不只是邊界框位置。盡管該分布可能更復(fù)雜,可能是多變量高斯分布或高斯混合分布,但該論文為了簡單起見假設(shè)坐標(biāo)是相互獨(dú)立的且使用了單變量高斯分布。
另外,基本 ground truth 邊界框也被形式化了一個(gè)高斯分布——狄拉克 δ 函數(shù)。
使用 KL 損失的邊界框回歸
在這里,目標(biāo)定位的目標(biāo)是在樣本上最小化預(yù)測分布和基本 ground truth 分布之間的 KL 距離。這個(gè) KL 距離即為邊界框回歸的損失函數(shù) L_reg。而分類損失則保持不變。
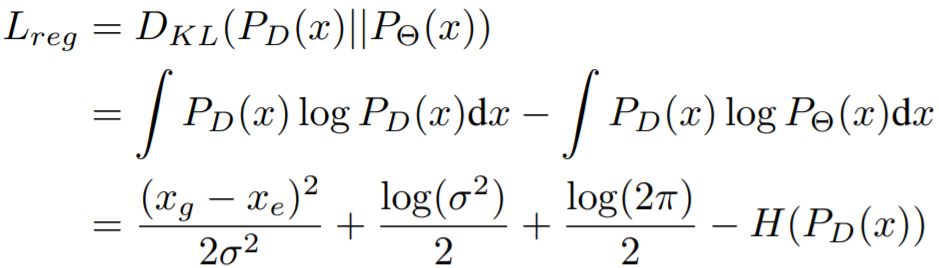
其中,x_g 為基本 ground truth 邊界框位置,x_e 為估計(jì)的邊界框位置,D_KL 是 KL 距離,σ 是標(biāo)準(zhǔn)差,P_D 是基本 ground truth 狄拉克 δ 函數(shù),P_Θ 是預(yù)測的高斯分布,Θ 是一組可學(xué)習(xí)的參數(shù)。
如圖 4 所示,當(dāng) x_e 不準(zhǔn)確時(shí),網(wǎng)絡(luò)會(huì)預(yù)測得到更大的方差 σ2,使 L_reg 更低。
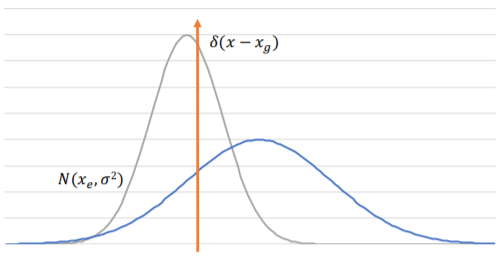
圖 4:藍(lán)色和灰色的高斯分布是估計(jì)結(jié)果。橙色表示狄拉克 δ 函數(shù),是基本 ground truth 邊界框的分布。
方差投票
在獲得預(yù)測位置的方差后,可根據(jù)所學(xué)習(xí)到的鄰近邊界框的方差直觀地投票選擇候選邊界框位置。
如算法 1 所示,其代碼基于 NMS,但有三行不一樣。
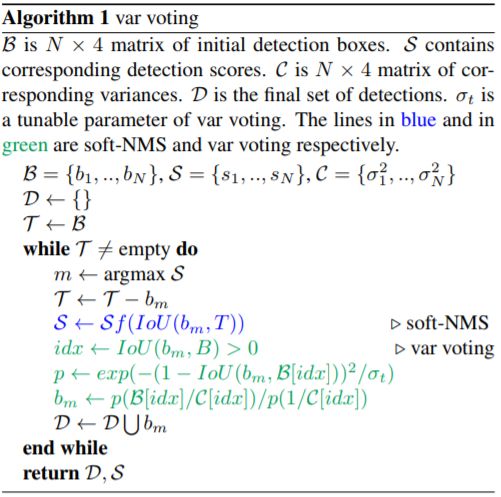
本文是在標(biāo)準(zhǔn) NMS 或 soft-NMS 的過程中投票所選框的位置。在選擇了有最大分?jǐn)?shù)的檢測結(jié)果后,再根據(jù)它及其鄰近邊界框計(jì)算它本身的新位置。本文受 soft-NMS 的啟發(fā)為更近的以及有更低不確定性的邊界框分配了更高的權(quán)重。
在投票期間權(quán)重更低的鄰近邊界框包含兩類:(1)高方差的邊界框;(2)與所選邊界框的 IoU 較小的邊界框。投票不涉及分類分?jǐn)?shù),因?yàn)楦头謹(jǐn)?shù)的框可能有更高的定位置信度。圖 5 給出了方差投票的圖示。使用方差投票可以避免圖 2 中提到的那兩類檢測問題。
圖 5:VGG-16 Faster R-CNN 在 MS-COCO 上的方差投票結(jié)果。每個(gè)邊界框中的綠色文本框?qū)?yīng)于預(yù)測的標(biāo)準(zhǔn)差 σ。
實(shí)驗(yàn)
曠視研究員基于 MS-COCO 和 PASCAL VOC 2007 數(shù)據(jù)集進(jìn)行了實(shí)驗(yàn)。實(shí)驗(yàn)配置細(xì)節(jié)如下:
使用了 4 個(gè) GPU
訓(xùn)練流程和批大小根據(jù)線性縮放規(guī)則進(jìn)行調(diào)整
VGG-CNN-M-1024 和 VGG-16 的實(shí)現(xiàn)基于 Caffe;ResNet-50 FPN 和 Mask R-CNN 的實(shí)現(xiàn)基于 Detectron
VGG-16 Faster R-CNN 遵照 py-faster-rcnn(github.com/rbgirshick/py-faster-rcnn),在 train2014 上訓(xùn)練,在 val2014 上測試;其它目標(biāo)檢測網(wǎng)絡(luò)的訓(xùn)練和測試分別在 train2017 和 val2017 上完成
σ_t 設(shè)為 0.02
除非另有說明,否則所有超參數(shù)都是默認(rèn)設(shè)置(github.com/facebookresearch/Detectron)
研究者基于 VGG-16 Faster R-CNN 評(píng)估了每個(gè)模塊對(duì)整體結(jié)果的貢獻(xiàn),包括 KL 損失、soft-NMS 和方差投票。表 1 給出了詳細(xì)結(jié)果。可以看到,每新增一項(xiàng)改進(jìn),都能實(shí)現(xiàn)結(jié)果的進(jìn)一步提升。
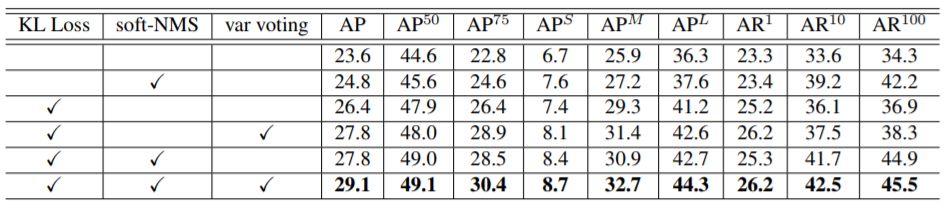
表 1:使用 VGG-16 Faster R-CNN 在 MS-COCO 數(shù)據(jù)集上檢驗(yàn)每個(gè)模塊的貢獻(xiàn)
準(zhǔn)確的目標(biāo)檢測
表 4 總結(jié)了在 ResNet-50-FPN Mask R-CNN 上不同方法對(duì)準(zhǔn)確目標(biāo)檢測的效果。使用 KL 損失,網(wǎng)絡(luò)可以在訓(xùn)練階段學(xué)習(xí)調(diào)節(jié)模糊邊界框的梯度。
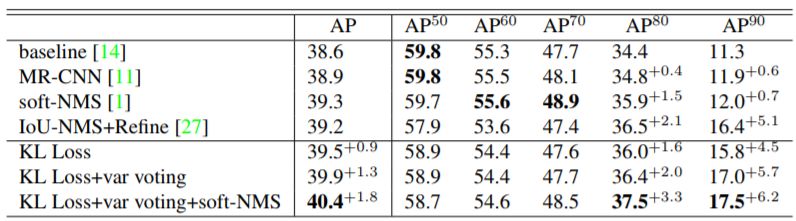
表 4:在 MS-COCO 上,不同方法對(duì)準(zhǔn)確目標(biāo)檢測的效果
曠視研究員還在特征金字塔網(wǎng)絡(luò)(ResNet-50 FPN)上進(jìn)行了評(píng)估,如表 6 所示。
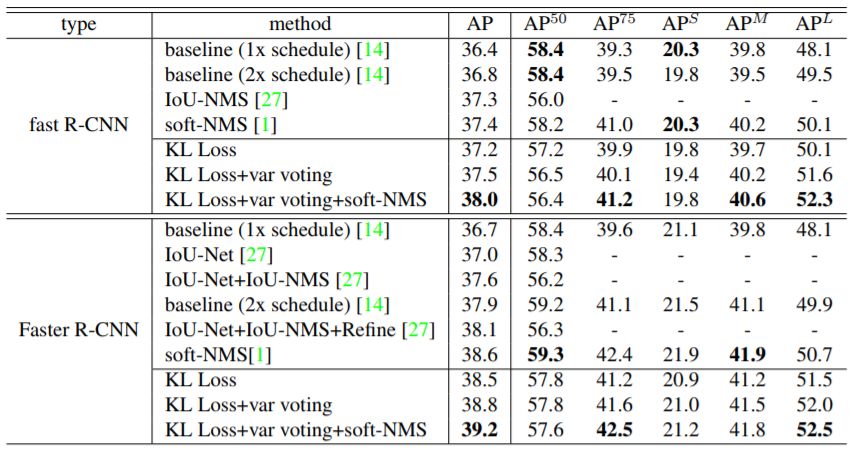
表 6:FPN ResNet-50 在 MS-COCO 上的表現(xiàn)對(duì)比
在PASCAL VOC 2007上的實(shí)驗(yàn)
盡管本文是針對(duì)大規(guī)模目標(biāo)檢測提出了這一方法,但也可將該方法用于更小型的數(shù)據(jù)集。研究者使用 Faster R-CNN 在 PASCAL VOC 2007 上進(jìn)行了實(shí)驗(yàn),該數(shù)據(jù)集包含約 5000 張 voc_2007_trainval 圖像和 5000 張 voc_2007_test 測試圖像,涉及 20 個(gè)目標(biāo)類別。所測試的骨干網(wǎng)絡(luò)為 VGG-CNN-M-1024 和 VGG-16。
結(jié)果見表 5,研究員也額外比較了 soft-NMS 和二次無約束二元優(yōu)化(QUBO)。QUBO 的結(jié)果包含 greedy 求解器和經(jīng)典的 tabu 求解器(二者的懲罰項(xiàng)都經(jīng)過了人工調(diào)整,以得到更好的性能)。可以看到,QUBO 比標(biāo)準(zhǔn) NMS 要差得多,盡管有研究認(rèn)為其在行人檢測上效果更好。研究者猜測 QUBO 更擅長檢測行人的原因是此時(shí)邊界框遮擋的情況更多。
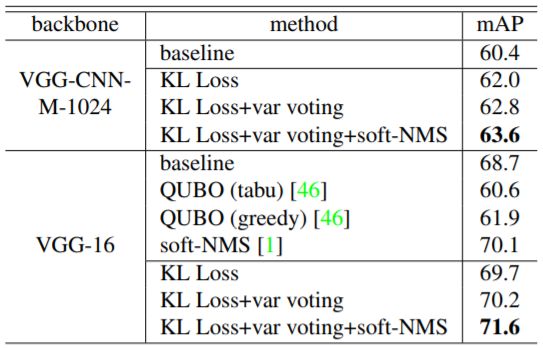
表 5:不同方法在 PASCAL VOC 2007 上的結(jié)果
結(jié)論
大規(guī)模目標(biāo)檢測數(shù)據(jù)集中的不確定性可能有礙當(dāng)前最佳目標(biāo)檢測器的表現(xiàn)。分類置信度并不總是與定位置信度強(qiáng)烈相關(guān)。這篇論文提出了一種全新的帶有不確定性的邊界框回歸損失,可用于學(xué)習(xí)更準(zhǔn)確的目標(biāo)定位。使用 KL 損失進(jìn)行訓(xùn)練,網(wǎng)絡(luò)可學(xué)習(xí)預(yù)測每個(gè)坐標(biāo)的定位方差。所得到的方差可實(shí)現(xiàn)方差投票,從而優(yōu)化所選擇的邊界框。實(shí)驗(yàn)結(jié)果也表明了這些新方法的有效性。
-
函數(shù)
+關(guān)注
關(guān)注
3文章
4372瀏覽量
64301 -
計(jì)算機(jī)視覺
+關(guān)注
關(guān)注
9文章
1706瀏覽量
46594 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1223瀏覽量
25299
原文標(biāo)題:CVPR 2019 | 曠視研究院提出新型損失函數(shù):改善邊界框模糊問題
文章出處:【微信號(hào):megvii,微信公眾號(hào):曠視MEGVII】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何創(chuàng)造可信任的機(jī)器學(xué)習(xí)模型?先要理解不確定性
去嵌入和不確定性是否使用了正確的設(shè)置
是否可以使用全雙端口校準(zhǔn)中的S11不確定性來覆蓋單端口校準(zhǔn)的不確定性?
N5531S TRFL不確定性
435B-K05輸出不確定性
基于矩陣分析的一種不確定性推理的數(shù)據(jù)融合方法
基于矩陣分析的一種不確定性推理的數(shù)據(jù)融合方法
一種求解動(dòng)態(tài)及不確定性優(yōu)化問題的新方法
如何用不確定性解決模型問題
針對(duì)自閉癥輔助的不確定性聯(lián)合組稀疏建模方法

深部目標(biāo)姿態(tài)估計(jì)的不確定性量化研究
將不確定性感知和姿態(tài)回歸結(jié)合用于自動(dòng)駕駛車輛定位
科技云報(bào)到:數(shù)字化轉(zhuǎn)型,從不確定性到確定性的關(guān)鍵路徑






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論