") 基于PWM的數(shù)字隨動系統(tǒng)設(shè)計
基于PWM的數(shù)字隨動系統(tǒng)設(shè)計
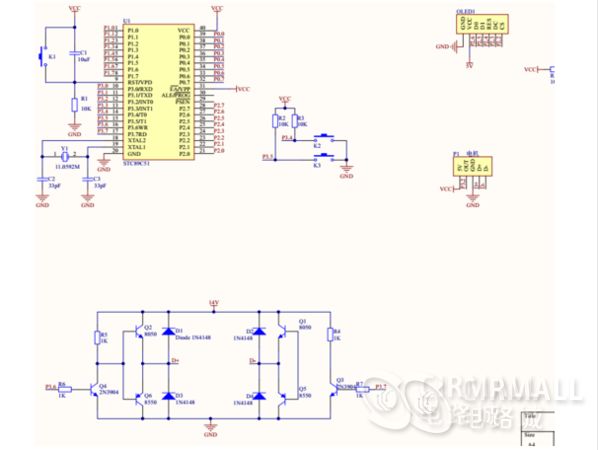
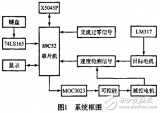
1. 基于電力電子技術(shù),先選擇合適的直流電源,通過PWM控制技術(shù),產(chǎn)生與給定成比例的直流電壓,先設(shè)計出PWM變換器。
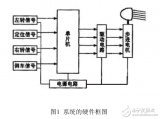
2. 需要選擇轉(zhuǎn)角反饋傳感器,設(shè)計出轉(zhuǎn)角反饋電路,以便使當(dāng)前位置能夠進入單片機;還需要選擇轉(zhuǎn)速反饋傳感器及安裝轉(zhuǎn)速反饋傳感器,設(shè)計出轉(zhuǎn)速反饋電路,以便使轉(zhuǎn)速信號能夠進入單片機。角度和轉(zhuǎn)速可通過按鍵調(diào)整,轉(zhuǎn)動過程中,可以一鍵停止。
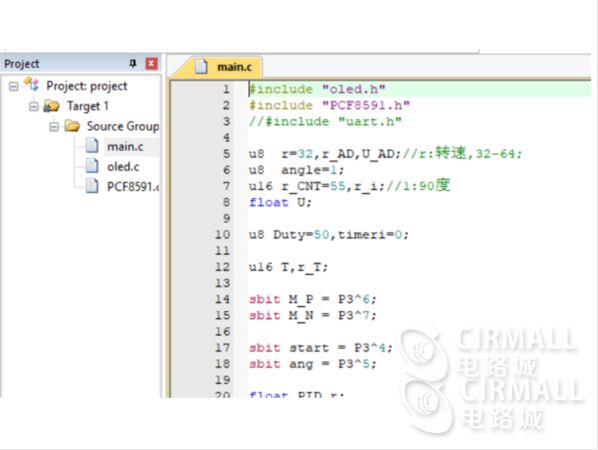
3. 將轉(zhuǎn)角反饋值與給定位置(轉(zhuǎn)角)進行比較,獲取位置偏差,再加上反饋的速度值,根據(jù)控制算法,例如PID算法,計算出此時的PWM脈沖占空比,送到PWM變換器,實現(xiàn)電機的電源控制,當(dāng)位置偏差為0時,PWM變換器也不輸出,電機轉(zhuǎn)速也為0,實現(xiàn)電機平穩(wěn)準(zhǔn)確地到達新的位置。
4. 與理論值進行對照,驗證設(shè)計的正確性。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2564文章
52696瀏覽量
764515 -
變換器
+關(guān)注
關(guān)注
17文章
2132瀏覽量
110505
原文標(biāo)題:基于PWM的數(shù)字隨動系統(tǒng)設(shè)計(原理圖+源程序+bom表+演示視頻)
文章出處:【微信號:cirmall,微信公眾號:電路設(shè)計技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
如何利用Protel 99 SE對隨動系統(tǒng)電路板進行仿真
本文基于Protel 99 SE對該隨動系統(tǒng)電路板進行仿真,為分析電路板故障原因提供重要依據(jù),較好地提高了裝備的維修保障能力。
發(fā)表于 04-25 09:25
如何利用磁羅盤和GPS的定向、定位技術(shù)設(shè)計車載定向天線云臺隨動系統(tǒng)?
本文針對由指揮車和被控車輛組成的應(yīng)用平臺,利用磁羅盤和GPS的定向、定位技術(shù)設(shè)計了車載定向天線云臺隨動系統(tǒng)。在該系統(tǒng)中,定向接收天線和磁羅盤固定在指揮車云臺上,GPS接收機天線安裝在指
發(fā)表于 05-17 06:21
基于VxWorks的隨動監(jiān)控系統(tǒng)
分析了嵌入式實時操作系統(tǒng)VxWorks及其開發(fā)環(huán)境Tornado的結(jié)構(gòu)和特點。應(yīng)用其強實時性和多任務(wù)調(diào)度、任務(wù)間通信的機制,提出了一種基于VxWorks的隨動監(jiān)控系統(tǒng)設(shè)計實現(xiàn)方案。
發(fā)表于 12-05 16:58
?19次下載
基于計算機的艦炮隨動系統(tǒng)數(shù)字化改進研究
針對某型艦炮隨動系統(tǒng)進行數(shù)字化改進,設(shè)計了一種基于計算機的數(shù)字隨
發(fā)表于 11-17 11:35
?26次下載
基于PC104的導(dǎo)彈隨動裝置檢測系統(tǒng)設(shè)計
針對某型導(dǎo)彈隨動裝置在實際應(yīng)用中的測試需求,設(shè)計了一種基于 PC104 嵌入式系統(tǒng)開發(fā)平臺的高可靠、高精度、小體積的檢測系統(tǒng),詳細(xì)介紹了該系統(tǒng)
發(fā)表于 07-12 16:39
?44次下載

基于ARM微處理器的隨動系統(tǒng)實驗平臺開發(fā)
隨動系統(tǒng),以機械位置或角度作為控制對象,主要用于解決位置跟蹤的控制問題。它廣泛應(yīng)用于軍事裝備和工業(yè)生產(chǎn)自動化領(lǐng)域。嵌入式系統(tǒng)是以應(yīng)用為中心、以計算機技術(shù)為基礎(chǔ),軟硬件可裁減、適應(yīng)應(yīng)用
發(fā)表于 09-01 11:33
?15次下載

基于AT89C2051汽車輔助照明隨動系統(tǒng)研究
本文介紹的汽車輔助照明隨動系統(tǒng)是以單片機AT892051芯片為控制核心,控制步進電機帶動輔助照明光源,隨方向盤的轉(zhuǎn)動而轉(zhuǎn)動。
發(fā)表于 09-07 16:29
?16次下載
基于單片機的電機隨動系統(tǒng)的設(shè)計與實現(xiàn)
介紹了一種電機隨動系統(tǒng)的單片機實現(xiàn)。它對目標(biāo)電機和被控電機速度采用光電數(shù)字測量,通過單片機PI控制算法以及一定同相措施,對晶閘管實施凋節(jié),達到凋壓控速的目的。同時介紹了部分器件和控制參
發(fā)表于 12-05 11:23
?28次下載
PID控制算法在火炮隨動系統(tǒng)中的應(yīng)用
文中以某火炮隨動系統(tǒng)的研制為背景,為了進一步提高系統(tǒng)精度,首先介紹了復(fù)合控制系統(tǒng)模型及分區(qū)PID算法,另外詳細(xì)論述了雙電機消隙的原理及動力
發(fā)表于 02-10 13:40
?5918次閱讀

隨動尾翼在調(diào)控汽車升力中研究
針對輕量化后汽車高速行駛時過大的升力影響汽車的動力性、行駛安全性和操作穩(wěn)定性等問題,對隨動尾翼在汽車高速行駛時控制汽車產(chǎn)生升力的能力方面進行了研究,對多種翼型的隨動尾翼控制汽車升力的能
發(fā)表于 03-16 16:22
?0次下載
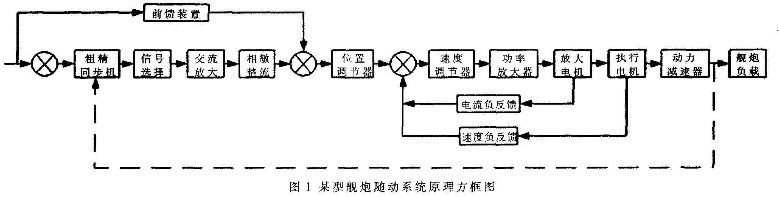
采用PWM控制技術(shù)實現(xiàn)對艦炮隨動系統(tǒng)進行數(shù)字化改進
目前我海軍艦炮的隨動系統(tǒng)仍沿用早期的機電式設(shè)備,它的主要缺點是跟蹤定位誤差大、機動能力差、快速突防能力不強、體積大、噪聲大、價格昂貴,而且故障率高。這些問題直接影響到艦艇綜合防御能力及生存能力的提高。為此,對該艦炮的
汽車前大燈隨動轉(zhuǎn)向系統(tǒng)(AFS)
電子發(fā)燒友網(wǎng)站提供《汽車前大燈隨動轉(zhuǎn)向系統(tǒng)(AFS).pdf》資料免費下載
發(fā)表于 11-16 14:34
?3次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論