 Envisics開發出支持實時動態全息圖的車載HUD
Envisics開發出支持實時動態全息圖的車載HUD

CINNO Research 產業資訊,在低調研究一年后,作為全息技術開發先鋒的車載平視顯示器(HUD)開發商Envisics在CES 2019展示了他們的新解決方案。我很遺憾錯過了那次樣品展示,不過后來又有幸收到公司邀請,我們到了他們位于底特律的辦公室參與了關于這項技術的討論。在那里,我們看到了迄今為止我見過的最好的車載HUD。
現在,幾乎所有的HUD都是基于圖像的。車載HUD利用直接顯像或微型顯示器創建一副虛擬的圖像畫面,然后將該虛擬圖像“投影”到某個固定的焦平面,該平面通常位于汽車的前部。Envisics的方法是使用一種定制開發的空間光調制器(SLM,Spatial Light Modulator),這是一種改進的微型顯示器,改進的目標是控制投射光的相位分布。這種方案在計算完待顯示圖像的全息圖數據之后,會進一步將這些全息圖數據傳輸到由激光或LED作為光源照射的SLM上并投影顯示。
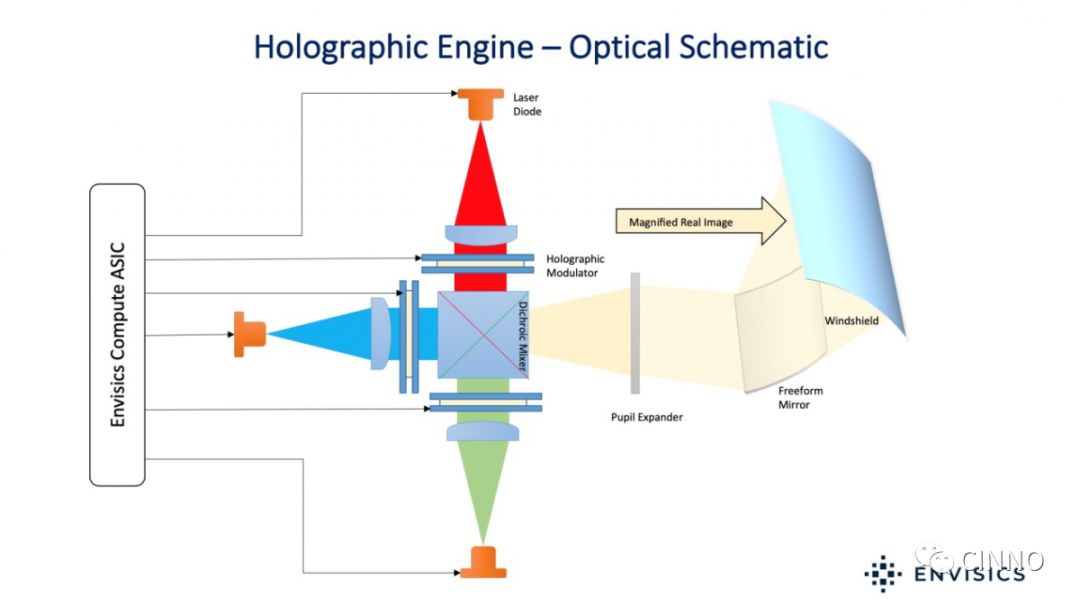
傳統基于圖像的方法一般會阻擋大量光線,進而降低光能利用率。這種新方法的優點是能夠充分利用所有光能,將其用于畫面內容的顯示。不過這種方法也有自己的缺點,那就是在計算相位全息圖時會帶來很大的計算負荷。
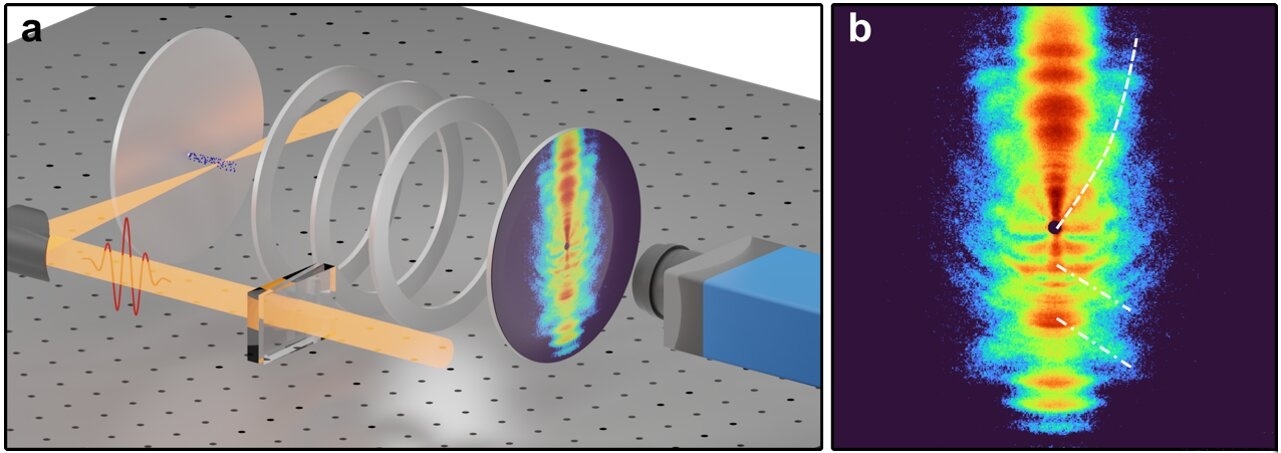
在我們的討論過程中,Envisics的首席技術官Jamieson Christmas博士解釋說,設計人員一定都不想通過簡單地對圖像進行傅里葉變換來計算所需要的全息圖。這種方案雖然可以生成光學全息圖,但是其光學效率非常低,而且計算結果還有非常大的零階分量,這在顯示器的顯示過程中會呈現為中間位置的一個亮點。
“相位全息圖方案可以消除上述這種不需要的零階分量,但是需要以額外的計算負荷為代價。傳統的計算方法基于反復的試錯試驗和迭代來獲得最終所需要的全息圖,”Christmas博士解釋說,“但這種方法不可能實時完成,它肯定會非常耗時。我博士研究方向的一方面就是設計一種新的方法,而這也正是我們目前全息圖解決方案的基礎。基于這種方法,我們能夠以超過每秒180幀的速度動態計算全彩色高分辨率的相位全息圖。”
Christmas博士解釋說,他們同時也定制開發了一款LCOS顯示器,以優化上述相位調制。這里需要雙折射非常高的液晶材料,這樣才有機會在全運動視頻速率下實現精確的相位調制。
“這些改進對于優化系統性能和效率至關重要,” Christmas博士說。
空間光調制器在可制造性方面具有另一個非常顯著的優點。Christmas博士解釋說,即使相位調制器上有許多缺失的像素,這些像素對應的信息也不會在最終的全息圖上可見,不過效率會低一些,另外對齊過程也非常簡單。從系統的角度來看,相位調制的HUD大概是傳統基于DLP或LCD的HUD的1/2。
利用實時動態全息圖生成方案,設計人員幾乎可以實現一系列的光學功能。像速度,方向箭頭等符號的顯示當然是最基本的,另外它還可以實現光學元件,如鏡頭等的功能。這是什么意思呢?這意味著這種方案可以實時移動虛擬圖像的焦平面。最重要的是,現在可以基于軟件而不是硬件的方法來對色彩,對比度,幀速率,位深度等進行性能折衷設計,從而可以很快地展示新功能。
Envisics向汽車行業展示的第二代 HUD實現了2.5米和10米兩個深度的雙平面解決方案。就分辨率而言,這里使用每角度內擁有的像素數量更合適。Envisics為較近圖像平面提供每度350像素的分辨率,為較遠圖像平面提供每度170像素的分辨率。設計人員對此進行了基準測試,該產品在20/20視覺測試下大約為每度60像素,這樣的分辨率說明我們正在討論的圖像具有非常高的保真度。這款設備的亮度可以從1 cd /m2到25K cd /m2進行調節。Christmas博士并未指明視野,但表示他們可以用這些顯示圖像同時覆蓋“三條公路”。
在Envisics的展示中,投影儀可以在距離HUD 10米處的屏幕上顯示駕駛視頻。當汽車行駛時,我們會看到方向箭頭以及用來突出路線的很寬的照明區域。當汽車轉彎時,這些很寬的照明區域也會同步在HUD視野(FOV)中移動。HUD所顯示畫面中還有車道保持線,自行車警示信號和其他AR提示信號。
這些提示信號看起來像是和真實的物理世界互相映射的,從觀看者角度來看,遠場圖像看起來一點都不像是放置在距觀察者很遠的地方。圖像生成利用了長距離的3D深度線索,像一種幾何體,這種幾何體可以讓大腦誤以為我們正在查看一個具有連續深度信息的空間。
下面的圖像顯示,用戶可以聚焦于近場平面的符號系統,這時遠場畫面由于離焦而虛化成背景;同樣,用戶也可以聚焦于遠場圖像,相應地,這時前景畫面失焦,這些都像我們在現實生活中感受到的一樣。
設備展示期間讓我分心的一件事是部分圖像中出現了一些重影。例如,當一個圓形圖標出現在視野的下半部分時,畫面重影比較嚴重,但是當它在視野中向上移動時會快速收斂進而消失。這里出現鬼影問題是因為擋風玻璃沒有針對平視顯示器展示樣品的大視場進行優化。他們告訴我,這在他們其他的產品上可以很輕松地解決。
我還認為紅色看起來會顯得有點暗淡。不過有趣的是,Christmas博士說,其他人還認為它太明亮了,這表明可能有一些人為因素在這里起作用。例如,每個人的明視反應都不同,因此激光波長的選擇會對人產生不同的影響。
總的來說,這是一次非常令人驚艷的展示,Christmas博士暗示Envisics正在與許多汽車制造商和供應商合作,在新車開發中部署這項技術,另外,他們正在研發更高階的版本。從這樣的展示品到在真實汽車的設計中應用通常需要很長時間,不過考慮到以前的汽車HUD公司的歷史記錄,也許我們可以期望這樣的技術會比想象的更快。
-
汽車電子
+關注
關注
3037文章
8328瀏覽量
170015 -
HUD
+關注
關注
15文章
171瀏覽量
47514
原文標題:AR/VR|Envisics開發出支持實時動態全息圖的車載HUD
文章出處:【微信號:CINNO_CreateMore,微信公眾號:CINNO】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
GLAD:利用全息圖實現加密和解密
?全息投影車載系統:薄膜電容耐高溫特性對光學模組的支撐作用

GLAD應用:體全息光柵模擬
車載光學HUD陽光倒灌太陽光模擬器

STM32L431RCT6主芯片 搭配 SD NAND-動態心電圖設備存儲解決方案
利用超快成像技術觀測到兩種截然不同的全息圖案
車載氣象監測站:實時監測道路風速風向溫濕度氣壓揚塵等
AR-HUD再突破!蔚來ET9首發搭載“共軸光場”AR-HUD
德賽西威HUD技術日活動圓滿落幕
設計仿真 基于VTD的AR-HUD仿真測試解決方案






 工商網監
工商網監
評論