") 基于現(xiàn)場試驗(yàn)的自動駕駛汽車接受度研究
基于現(xiàn)場試驗(yàn)的自動駕駛汽車接受度研究

自動駕駛技術(shù)已經(jīng)成為汽車產(chǎn)業(yè)發(fā)展的戰(zhàn)略方向。然而,面向人類對于自動駕駛汽車接受度的現(xiàn)場實(shí)證研究卻鮮有開展。本研究招募了 300 名參試者乘坐具備 SAE Level 3 水平的自動駕駛汽車,測量了參試者在乘坐前后對自動駕駛技術(shù)的信任度、感知有用性、感知易用性、感知安全性和接受度,確定了乘坐體驗(yàn)影響自動駕駛汽車接受的關(guān)鍵心理因素。
1.引言
根據(jù)世界健康組織的統(tǒng)計(jì),每年全世界有超過 120 萬人死于道路交通事故,對人類健康和社會和諧發(fā)展產(chǎn)生巨大的影響。超過 70% 的交通事故與人的錯誤操作有關(guān)(Dhillon,2007)。自動駕駛技術(shù)在減少因人類誤駕駛而引發(fā)的交通事故方面具有很大的潛力(NHTSA,2016)。AVs 是能夠感知交通環(huán)境,可通過軟件算法導(dǎo)航,不需要駕駛員的決策和操作就能夠控制車輛運(yùn)動的新一代汽車。自動駕駛技術(shù)被認(rèn)為是確保道路安全的突破性關(guān)鍵技術(shù)。AVs 還有減少交通擁堵、增強(qiáng)通勤效率、減少燃料消耗的潛力。根據(jù) SAE 對汽車自動化水平的分類,有條件自動化 L3、高度自動化 L4、全自動化 L5 的 AVs 都能夠自主駕駛。
自動駕駛技術(shù)越來越受到汽車制造商、科技公司、政策制定者以及公眾的關(guān)注。許多的研究者和機(jī)構(gòu)對 AVs 的長期應(yīng)用做出了不同的預(yù)測。關(guān)于 AV 的應(yīng)用預(yù)測引用最多的是 Litman 的研究,他預(yù)測道,到 2050 年自動駕駛將是絕大多數(shù)新車的一個標(biāo)準(zhǔn)功能,40-60% 的車輛隊(duì)列、80-100% 的銷售車型、50-80% 的汽車旅行都將應(yīng)用 AVs。Litman 還預(yù)測,AV 在增強(qiáng)道路安全和減少交通擁堵方面的作用很可能會在 2040s-2060s 顯現(xiàn)出來。
影響 AV 大量應(yīng)用的障礙可能不是技術(shù)上的,而是心理上的。如果 AV 不能被公眾廣泛接受,那就不能增強(qiáng)道路安全,也不能實(shí)現(xiàn)對社會和環(huán)境的期望效益。現(xiàn)階段關(guān)于公眾對 AV 意見的投票調(diào)查顯示,公眾對 AV 持有抵抗或中立的態(tài)度。為了更好地預(yù)測、解釋和增強(qiáng)公眾對諸如 AV 等新興技術(shù)的接收度,需要大量研究來深刻地揭示影響公眾接收或拒絕新興技術(shù)的原因。在意識到影響 AV 接收度因素的研究需求后,許多的研究者展開調(diào)查以確定影響公眾使用 AV 意向的決定因素。
但是在這個領(lǐng)域的研究上仍然存在許多的空白。首先,了解公眾對 AV 接受度的研究仍然是非常有限的,影響接受度的心理層面決定因素仍然是大量未知的。其次,大多數(shù)的研究依賴于線上調(diào)查,關(guān)注于了解對 AV 有很少或幾乎沒有真實(shí)體驗(yàn)的受訪者的一般觀點(diǎn)。像這樣的一種調(diào)查研究方法可能得不到真實(shí)的研究結(jié)果。這些受訪者不了解 AV 如何共工作、AV 功能、駕駛員與 AV 的交互方式。必須通過現(xiàn)場實(shí)驗(yàn),讓參試者真實(shí)體驗(yàn) AV,然后根據(jù)他們的感受來解釋公眾對 AV 的接受度。就作者了解到的情況,目前在 AV 上還沒有進(jìn)行過這樣的現(xiàn)場試驗(yàn)。
為了了解 AV 接受度背后的心理驅(qū)動因素,我們進(jìn)行了一個現(xiàn)場試驗(yàn)。邀請了 300 名學(xué)生作為乘客體驗(yàn) AV 以獲得一手的乘坐體驗(yàn)數(shù)據(jù)。利用這些參與者的體驗(yàn)反饋結(jié)果,我們分析了真實(shí)直接的體驗(yàn)對 AV 接受度及其心理決定因素的影響,并建立了一個心理學(xué)模型來解釋和預(yù)測參與者再乘坐該 AV 的意愿和未來使用 L5 級自動駕駛汽車的意向。
2.理論框架和假設(shè)
2.1接受度和心理模型
接受度是允許新汽車技術(shù)達(dá)到預(yù)測效益水平的先決條件。這個定義意味著接受度是交通系統(tǒng)新技術(shù)實(shí)施應(yīng)用的必要條件。Adell 等(2014)也把駕駛員對車載系統(tǒng)的接受度定義為駕駛過程中系統(tǒng)與個人的協(xié)作程度,或者系統(tǒng)不可獲得時使用它的意向。盡管接受度有多種定義,一般的理解是它涉及多個方面,比如購買意愿和使用意向(Adell,2014)。研究者經(jīng)常關(guān)注于接受度的一個方面。
一些駕駛員行為模型和技術(shù)接受度理論被用來解釋用戶接受度,包括技術(shù)接受度模型 TAM,計(jì)劃行為理論 TPB,技術(shù)應(yīng)用和接受度統(tǒng)一性理論 UTAUT,UTAUT2。在這些理論里,TPB 用來解釋駕駛員的一般行為,而其他三種模型是在解釋信息系統(tǒng)研究中的技術(shù)接受度發(fā)展起來的。這些模型里包含三類結(jié)構(gòu),分別是人們對一種技術(shù)的看法和感知,使用這項(xiàng)技術(shù)的行為意向,以及實(shí)際的應(yīng)用行為。這些模型的基本原理是人們的感知和看法將會決定他們的意向,進(jìn)而決定他們的實(shí)際使用行為。研究影響用戶使用意向和實(shí)際使用行為的主要感知因素是非常關(guān)鍵的。在 TAM 模型里,感知有用性 PU 和感知易用性 PEU 被認(rèn)為是行為意向 BI 的兩個直接影響因子。TPB 模型包括行為意向 BI 的三個內(nèi)容——態(tài)度、主觀規(guī)范和感知行為控制(與感知易用性相似)。它表明積極的態(tài)度、有利的規(guī)范性和意志控制看法都將正面影響技術(shù)的使用意向。在 UTAUT 模型里,假定期望的表現(xiàn)(如感知有用性)、期望的成果(如感知易用性)和社會影響都正面地影響行為意向,再和其他促進(jìn)條件共同正面影響實(shí)際應(yīng)用行為。UTAUT2 模型里又加入了享樂動機(jī)、價(jià)格值和習(xí)慣三個因素。
上面提到的模型都已經(jīng)被用來解釋新興車載技術(shù)的駕駛員接受度。這些模型也被應(yīng)用于近年基于調(diào)查的 AV 和 AS 研究,來解釋人們使用 AV 和 AS 的意向。這些研究分享了某些發(fā)現(xiàn),其中一個研究證實(shí)了這些心理模型影響行為意向的能力。這些研究在影響行為意向的因素方面產(chǎn)生了不一致或相互矛盾的結(jié)果。比如,感知有用性被逐漸發(fā)現(xiàn)是影響行為意向的主要預(yù)測因子,但有時被發(fā)現(xiàn)無法預(yù)測行為意向的具體措施(Nordhoff,2017)。這些與感知易用性對行為意向的重要性有關(guān)的不同研究結(jié)果主要有:Choi(2015)發(fā)現(xiàn)感知易用性是一個較弱的預(yù)測因素;Madigan(2017)和 Motak(2017)發(fā)現(xiàn)感知易用性是一個沒有意義的預(yù)測因素;Nordhoff(2017)和 Lee(2017)發(fā)現(xiàn)感知易用性不是一個穩(wěn)定的預(yù)測因素但是能影響行為意向的具體措施。準(zhǔn)確理解感知易用性對行為意向重要性是必要的,因?yàn)?PEU 能夠影響 AV 的用戶設(shè)計(jì)方式。
2.2研究目標(biāo)和假設(shè)發(fā)展
本研究的目的是兩個方面。通過邀請參與者直接體驗(yàn) AV 的自動駕駛模式,提出了大規(guī)模的現(xiàn)場研究,自然就引出了自動駕駛汽車體驗(yàn)的影響是什么的問題。對這個問題的準(zhǔn)確回答是第一個目的。對直接體驗(yàn)的影響研究文獻(xiàn)比較少,但是就是這些少量的研究其研究結(jié)果也較為混亂。在他們的小規(guī)模研究中,Motak(2017)指出 AS 的體驗(yàn)對參與者的感知有用性有所增強(qiáng),并引起了參與者對 AS 積極的態(tài)度。Payre(2016)基于他們在全自動駕駛模擬器上的實(shí)驗(yàn)研究發(fā)現(xiàn),模擬器體驗(yàn)并不能增加全自動駕駛的接受度,并且相反地,在駕駛條件受損的情況下模擬器反而降低了參與者使用它的興趣。
本研究中,注意力集中在直接體驗(yàn)的其他影響上,主要是與觀念、情感和行為相關(guān)的影響,這些影響被之前的接受度研究很大程度上忽視了。直接體驗(yàn)會幫助人們評估與對象相關(guān)的信息,引導(dǎo)人們用更加細(xì)致深入的體驗(yàn)達(dá)成合理的態(tài)度并校準(zhǔn)他們的看法和感知,并在看法、意向和行為方面表現(xiàn)出更大的一致性。相反地,暴露出來的某些信息可能導(dǎo)致人們采取較少的努力過程。本文提出的的現(xiàn)場研究不僅考慮了直接體驗(yàn)是否會導(dǎo)致人們在信任度、感知有用性、感知易用性和行為意向方面的態(tài)度改變;而且測試了直接體驗(yàn)是否增加了心理決定因素和行為意向的相關(guān)性。此外,如上所述,現(xiàn)有的 AV 研究報(bào)告關(guān)于感知易用性對行為意向的重要性有不同的結(jié)論,本文的現(xiàn)場研究正好提供了一個 PU 對 BI 影響的驗(yàn)證機(jī)會。
第二個主要目的是基于現(xiàn)場體驗(yàn)數(shù)據(jù)解釋和預(yù)測公眾對 AV 的接受度并測試提出的心理學(xué)模型。鑒于以下兩個原因,本文模型以傳統(tǒng)的 TAM 模型為基礎(chǔ)。第一,TAM 模型(Davis,1989)被先前的研究者應(yīng)用在 AV 和車載技術(shù)調(diào)查上;第二,TAM 模型在解釋駕駛員對新興車載技術(shù)的接受度上有相對較好的效果。駕駛 AV 的感知安全性 PS 和對這個技術(shù)的信任度 Trust 這兩個因素被突出添加進(jìn) AV 背景下的 TAM 模型里。鑒于安全是駕駛的第一要義并且 AV 是一項(xiàng)新興技術(shù),人們對 AV 的安全性感知和技術(shù)的初始信任度在他們對 AV 的接受度形成過程中發(fā)揮著關(guān)鍵作用。模型中考慮了行為意向 BI 和再乘坐意愿 WTR 兩個接受度表現(xiàn)方面,它們用來檢查所考慮的決定因素(PU,PEU,PS,Trust)能否成為 AV 接受度的穩(wěn)定預(yù)測因子。
2.2.1感知有用性和感知易用性
在 TAM 模型 Davis(1989)里,感知有用性和感知易用性是對技術(shù)接受度有主要貢獻(xiàn)的兩個外部變量。Davis(1989)定義感知有用性為個人認(rèn)為使用一個特定的系統(tǒng)時增強(qiáng)其工作表現(xiàn)的程度。通過定義,感知有用性被描述為系統(tǒng)被有效利用的程度。它跟 UTAUT(Venkatesh,2003)模型里的期望表現(xiàn)很接近。Davis(1989)定義感知易用性是個人認(rèn)為使用一個特定系統(tǒng)不需要努力的程度。也就是說,感知易用性能夠被理解為與人們在使用該系統(tǒng)時所感受到的困難相反。它與 TPB(Ajzen,1991)模型里的感知行為控制、UTAUT(Venkatesh,2003)模型里的努力期望是相似的。
先前的研究均支持感知有用性/易用性與技術(shù)接受度之間的積極聯(lián)系(Davis,1989;Ghazizadeh,2012;KingandHe,2006;Rahman,2017;Venkatesh,2003)。這種聯(lián)系的背后是行為決策研究中的成本效益范式(Payne,1992)。感知有用性與感知收益、感知易用性與感知花費(fèi)都是緊密相關(guān)的。人們總在追求高收益低花費(fèi)的決策。鑒于 TAM 模型已經(jīng)通過各種技術(shù)、應(yīng)用和系統(tǒng)被驗(yàn)證了,因此 AV 接受度也應(yīng)該遵循這些關(guān)系。然而,正如第一部分所說,TAM 模型中的 PU、PEU 兩個結(jié)構(gòu)對 AV 接受度的影響可能并不像 TAM 模型描述地那樣簡單。本文的場地研究將首次驗(yàn)證下面的假設(shè):
H1、H2:感知有用性與行為意向和再乘坐意愿呈正相關(guān);
H3、H4:感知易用性與行為意向和再乘坐意愿呈正相關(guān)。
2.2.2 感知安全性
確保駕駛員、乘客和其他道路使用者安全,減少由于人類駕駛引發(fā)的交通事故等的緊迫需要已經(jīng)刺激了 AV 的發(fā)展。安全性是 AV 的一個主要賣點(diǎn)(Fagnantand Kockelman,2015)。然而,對人們來說 AV 存在風(fēng)險(xiǎn)、不確定性和失控等問題(Kyriakidis,2015)。駕駛以安全為核心。當(dāng)人們乘坐 AV 時意味著將自己的安全全權(quán)交給了自動駕駛系統(tǒng)。他們將會提出比自駕安全性更高的自動駕駛安全要求(Waycaster,2018)。我們之前的研究發(fā)現(xiàn)公眾認(rèn)為 SDVs 應(yīng)當(dāng)比傳統(tǒng)的人類駕駛車輛安全 4 到 5 倍。如果人們不能從 AV 的體驗(yàn)中感受到相當(dāng)程度的安全,他們就不可能接受和使用 AV。事實(shí)上,一些對公眾觀點(diǎn)的調(diào)查結(jié)果是許多人們對 AV 的安全問題非常擔(dān)心(Bansal,2016;Howardand Dai,2014;Kyriakidis,2015),這可能會導(dǎo)致他們不愿意乘坐 AV。一些研究已經(jīng)強(qiáng)調(diào)到,增強(qiáng)感知安全性對促進(jìn)公眾對 AV 的接受度有關(guān)鍵作用(Salonen,2018;Shariff,2017)。然而,據(jù)我們所知,還沒有實(shí)驗(yàn)性研究探究過感知安全性對 AV 接受度的影響。
在本文的研究中,感知安全性被定義為駕駛員和乘客駕駛或乘坐 AV 時能夠感受到放松、安全和舒適的趨勢。實(shí)驗(yàn)性證據(jù)(Delbosc andCurrie,2012)表明感知安全性是乘坐公共交通意向的一個重要預(yù)測因子。對 AV 來說,人們的安全性感知更加重要,因?yàn)槿藗儗@項(xiàng)技術(shù)的安全性高度擔(dān)心。本文的現(xiàn)場研究中,如果參與者在體驗(yàn) AV 的過程中感到非常安全,他們就可能更有意向在未來使用 AV,同樣也會愿意再次乘坐他們體驗(yàn)過的 AV。因此,我們提出了下面兩個假設(shè):
H5、H6:感知安全性與行為意向和再乘坐意愿呈正相關(guān)。
2.2.3 信任度
信任是一種心理狀態(tài),就像基于對另一個人的意圖或行為的積極期望而接受其弱點(diǎn)(Rousseu,1998)。信任是人機(jī)交互的基礎(chǔ)(Leeand Moray,1994;Lee and See,2004)。人和自動化機(jī)器之間的交互通過信任度來調(diào)解(Ghazizadeh,2012)。有研究發(fā)現(xiàn),對自動化機(jī)器的信任度影響人們的接受度、利用率和依賴行為(Lee and Moray,1994;Lee andSee,2004;Merritt and Ilgen,2008;Parasuraman and Riley,1997),信任度是進(jìn)行依賴性活動的心理驅(qū)動因素。這里對 AV 的信任度定義為公眾和潛在消費(fèi)者愿意成為 AV 推廣者的意愿程度。
雖然在 TAM(Davis,1989)模型及其后研究(Venkatesh,2003;Venkatesh,2012)中最初并沒有考慮到信任度,但許多后期的研究(Ghazizadeh,2012;Hengstler,2016;Pavlou,2003)認(rèn)為把 Trust 加入 TAM 模型中是必要的,尤其是在高風(fēng)險(xiǎn)和不確定的情況下。Pavlou(2003)把 Trust 和感知風(fēng)險(xiǎn)加入 TAM 模型應(yīng)用于電子商務(wù)相關(guān)研究,并且假設(shè)信任度能夠直接影響行為意向,或者通過感知有用性、感知易用性和感知風(fēng)險(xiǎn)間接影響行為意向。在Pavlou(2003)假設(shè)的基礎(chǔ)上,Ghazizadeh(2012)把 TAM 模型拓展到自動化技術(shù)接受模型上來解釋自動化技術(shù)的接受情況,并且指出對自動化技術(shù)的信任度可以是行為意向的直接決定因素,也能通過感知有用性和感知易用性間接影響行為意向。Choi 和 Ji(2015)應(yīng)用這些模型研究外行人使用 AV 的行為意向。
作為一種情感反應(yīng),對技術(shù)的信任可能會產(chǎn)生接受和使用該技術(shù)的意愿(Lee and See,2004;Mcknight,2002)。信任度對消費(fèi)者使用信息系統(tǒng)和電子商務(wù)的意愿的直接作用已經(jīng)被許多研究測試驗(yàn)證過了(Gefen,2003;Mcknight,2002;Pavlou,2003)。相似地,Trust 的水平?jīng)Q定了 AV 將會被消費(fèi)者使用的程度(Shariff,2017)。如果人們不是足夠信賴 AV,他們就不會使用 AV 進(jìn)而從中獲益。因此,充分的公眾信任度被認(rèn)為是 AV 大量應(yīng)用的必要前提(Noy,2018;Shariff,2017)。這個引出以下的假設(shè):
H7、H8:信任度與行為意向和再乘坐意愿呈正相關(guān)。
信任度可能會影響與技術(shù)相關(guān)的感知有用性和感知易用性認(rèn)知過程的形成,并最終做出是否接受該技術(shù)的判斷。因此,信任度可能通過感知有用性和感知易用性間接影響行為意向(Choi andJi,2015;Ghazizadeh,2012;Nordhoff,2016;Pavlou,2003)。此外,信任度還有減少感知風(fēng)險(xiǎn)和不確定性的特定作用。之前的研究(Choi and Ji,2015;Pavlou,2003)都曾證實(shí)信任度能夠降低感知風(fēng)險(xiǎn)。相信 AV 技術(shù)可靠性的人更有可能克服他們對這項(xiàng)技術(shù)的風(fēng)險(xiǎn)感知度。因此,在使用 AV 時高度信任更能夠增強(qiáng)安全性感知。這可以引出以下假設(shè):
H9、H10、H11:信任度與感知有用性、感知易用性和感知安全性呈正相關(guān)。
基于上述理論假設(shè),提出如圖 1 所示的自動駕駛車輛技術(shù)接受度模型。圖中的四個內(nèi)容(信任度、感知有用性、感知易用性、行為意向)與 L5 級自動駕駛車輛有關(guān)。由于現(xiàn)階段沒有 L5 級的自動駕駛路測車輛,因此本文使用一輛較低自動化的 AV 來讓參與者直接體驗(yàn)不同交通場景下的自主駕駛。參與者將會在體驗(yàn)后校正他們對自主駕駛車輛的感知和判斷。
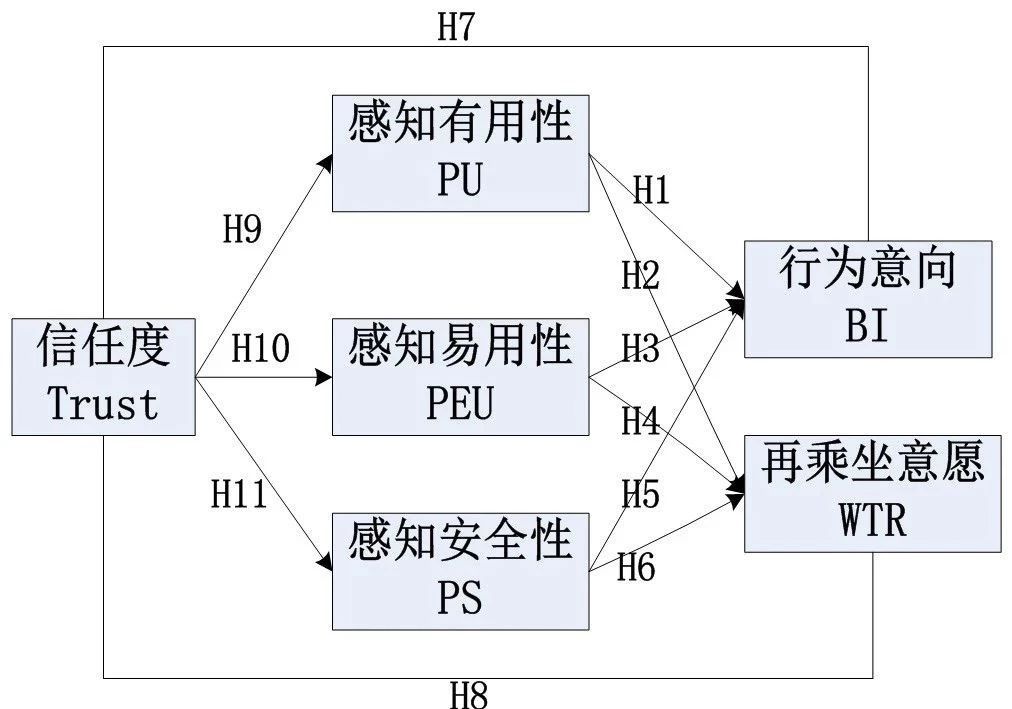
圖 1 自動駕駛技術(shù)接受度模型
3.方法論
3.1設(shè)備和場景設(shè)計(jì)
圖 2 所示是試驗(yàn)用自動駕駛汽車——信達(dá) AV,其上裝配了高分辨率立體攝像機(jī),一個激光雷達(dá)和一個差分 GPS。信達(dá) AV 是由比亞迪汽車集團(tuán)制造的乘用車改裝而成,主要用來進(jìn)行科學(xué)研究和實(shí)驗(yàn)。信達(dá) AV 是 SAE Level 3 水平:系統(tǒng)能夠完成一些駕駛?cè)蝿?wù)并監(jiān)控某些情況下的行駛環(huán)境,人類駕駛員必須在自動駕駛系統(tǒng)請求時接管車輛控制權(quán)。信達(dá)AV能夠?qū)崿F(xiàn)五種類型的功能:
感知和定位;
全局路徑規(guī)劃;
行為推理;
軌跡規(guī)劃;
軌跡跟蹤控制。
當(dāng)給信達(dá) AV 一個計(jì)劃目的地時,它將根據(jù)已知交通網(wǎng)絡(luò)計(jì)算可行路線并開始遵循計(jì)劃路線行駛。運(yùn)行過程中,信達(dá) AV 能夠感知道路上靜止的和突然出現(xiàn)的動態(tài)物體,并控制車輛的方向和速度以避免可能發(fā)生的碰撞。

圖 2 長安大「信達(dá)號」自動駕駛車
長安大學(xué)車聯(lián)網(wǎng)與智能汽車試驗(yàn)場 CU-CVIS 構(gòu)建了一個自動駕駛車輛測試軌道 AVTT。CU-CVIS 包括一條 2.4 公里長的環(huán)形高速雙向測試道路,一個 1.1 公里長的 4 車道直線軌道,并擁有四種不同路面,是一個進(jìn)行智能網(wǎng)聯(lián)汽車應(yīng)用測試的綜合封閉場地。
該自動駕駛車輛測試軌道長 1 公里,如圖 1 所示,共設(shè)計(jì)了 9 種典型駕駛場景,記為 S1-S9。測試軌道圖和部分場景圖如圖 3 所示。
表 1 九個駕駛場景的描述

圖 3 測試軌道圖與 S1、S9 場景圖
3.2措施
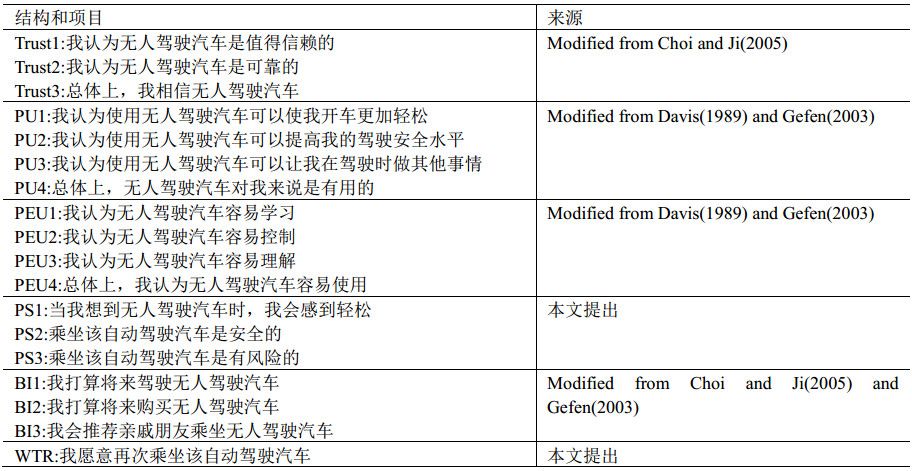
表 2 列出了信任度、感知有用性、感知易用性、感知安全性、行為意向和再乘坐意愿這六個結(jié)構(gòu)和它們的具體感受項(xiàng)。所有的感受項(xiàng)都以同意程度來進(jìn)行量化(絕對不同意為 1,絕對贊同為 5)。信任度、感知有用性、感知易用性和行為意向都與 L5 級自動駕駛車輛有關(guān)。感知安全性是對直接體驗(yàn)的自動駕駛車輛的安全性水平感知;再乘坐意愿表示參與者愿意再次乘坐該 AV 車的程度。
表 2 六個結(jié)構(gòu)及其具體感受項(xiàng)和來源
3.3參與者和試驗(yàn)過程
300 名本科生自愿參加了試驗(yàn)。300 人當(dāng)中,57%(171 人)是男生,25.3%(76 人)持有有效駕駛證件,94.3%(283 人)之前聽說過 L5 級自動駕駛車輛。它們分別來自于班級為單位、個人郵件及其他社會媒體的申請報(bào)名。所有的參與者都在體驗(yàn)前簽署了書面知情同意書。該研究是在長安大學(xué)的批準(zhǔn)下進(jìn)行的。
試驗(yàn)時每次 AV 內(nèi)乘坐 2-3 名體驗(yàn)者。首先,參與者必須閱讀實(shí)驗(yàn)的介紹,并對告知內(nèi)容進(jìn)行簽字確認(rèn);閱讀 L5 級自動駕駛車輛介紹內(nèi)容,通過在安靜的實(shí)驗(yàn)室里體驗(yàn)前問卷調(diào)查的填寫來對其如何看待 L5 級 AV 做出回應(yīng)。試驗(yàn)中,測試員在駕駛 L3 級 AV 5-10 秒后切換至自動駕駛模式。接著,AV 在自動駕駛模式下通過所有駕駛場景。由于安全原因,一輛人工駕駛車輛在保持安全距離的情況下始終監(jiān)控并記錄 AV 的實(shí)時情況。我們鼓勵體驗(yàn)者對信達(dá) AV 和 L5 級自動駕駛車的操作和功能進(jìn)行提問。信達(dá) AV 最終在測試駕駛員的操作下停在起點(diǎn)。之后,體驗(yàn)者被引導(dǎo)回實(shí)驗(yàn)室填寫更加完整的體驗(yàn)后調(diào)查問卷。最后,向每一名體驗(yàn)者支付了 30 元報(bào)酬。典型的現(xiàn)場實(shí)驗(yàn)視頻可提供給有需要的讀者。本文中用到的數(shù)據(jù)是從體驗(yàn)前后的問卷中提取出來的。
本文的現(xiàn)場試驗(yàn)是在 2017 年 8 至 10 月間的晴天里進(jìn)行的。整個實(shí)驗(yàn)過程中使用相同的 AV 來確保參與者 AV 體驗(yàn)的一致性。出于安全原因以及交通場景的復(fù)雜性(例如,在 S3 中綠燈和 S6 中緊急車輛通行的等待),AV 必須以相當(dāng)?shù)偷乃俣冗\(yùn)行在自動駕駛模式下,平均速度為 20 km / h,預(yù)設(shè)最高速度為 40km / h。這次 AV 體驗(yàn)持續(xù) 4.5 到 5 分鐘。在試驗(yàn)過程中,測試駕駛員的手離開了方向盤,但他隨時準(zhǔn)備在必要時接管 AV;事實(shí)上,在整個現(xiàn)場試驗(yàn)中沒有發(fā)生人工干預(yù)。每個參與者僅有一次試乘機(jī)會。
4.結(jié)果分析
4.1測量模型
基于偏最小二乘法(partialleast squares,PLS)的結(jié)構(gòu)方程建模(the structural equationmodeling,SEM)技術(shù)(PLS-SEM)被用來測試測量模型和結(jié)構(gòu)模型。PLS-SEM 被認(rèn)為適合于分析復(fù)雜道路模型。它不受嚴(yán)格的、不切實(shí)際的假設(shè)的影響,樣本量要求不高。用R包「plspm」來進(jìn)行 PLS-SEM 的分析,遵循引導(dǎo)程序(1,000 個子樣本)。
表 3 測量模型的信度和效度
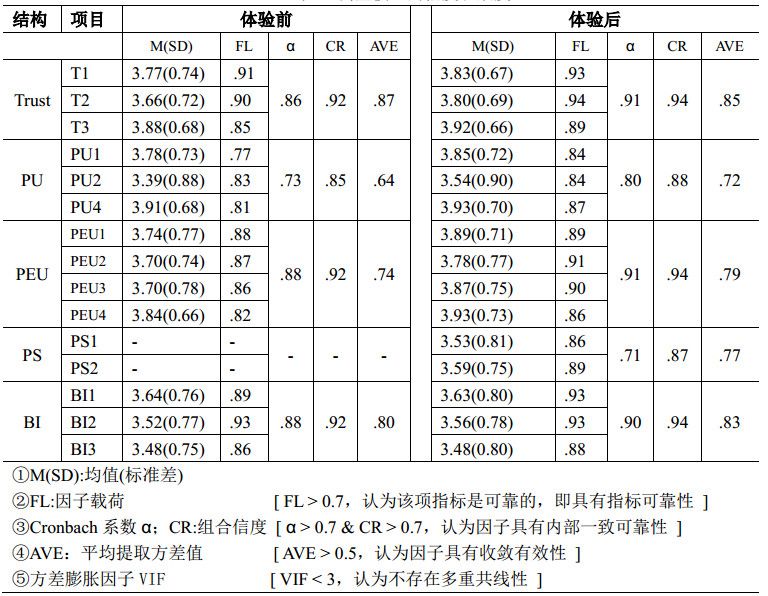
如表 3 所示,參與者體驗(yàn) AV 前后測量模型的指標(biāo)可靠性,內(nèi)部一致可靠性,收斂有效性和判別有效性都被分別記錄下來了。這些指標(biāo)沒有包括再乘坐意愿,因?yàn)樵俪俗庠甘亲鳛閱为?dú)一項(xiàng)進(jìn)行測量的。PU3 和 PS3 這兩項(xiàng)由于低要素負(fù)荷(<0.70)而被刪掉了。在最終的測量中,判斷如下:
所有項(xiàng)目的因子載荷都高于 0.70,證實(shí)了指標(biāo)的可靠性。
所有組合信度(CR)和 α 值都大于 0.70,證實(shí)了內(nèi)部一致的可靠性。
所有平均提取方差(AVE)值超過標(biāo)準(zhǔn)值 0.50,證實(shí)了收斂有效性。
每個 AVE 的平方根(在表 4 中的對角線上示出)大于相關(guān)結(jié)構(gòu)間的相關(guān)性,證實(shí)了判別有效性。
結(jié)構(gòu)的方差膨脹因子(VIF)低于 3.0,表明不存在多重共線性(Hair 等,2014)。因此,測量模型的信度和效度是充分的。
表 4 體驗(yàn) AV 前后的均值(標(biāo)準(zhǔn)差)和零級相關(guān)性
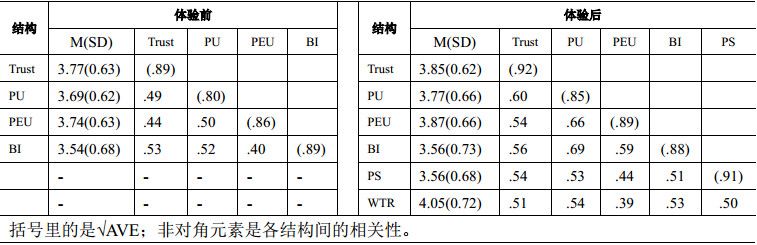
對參與者 AV 體驗(yàn)前后測量到的四種結(jié)構(gòu)平均值進(jìn)行比較發(fā)現(xiàn),體驗(yàn)后的 Trust,PEU,以及 PU 均顯著增加,但BI基本沒有變化(△M= 0.02)。根據(jù) ELM 理論可知,直接體驗(yàn)將增加感知-意向-行為之間的一致性。也就是說,正如本文假設(shè)的一樣,AV 體驗(yàn)增加了四種結(jié)構(gòu)(Trust,PU,PEU 和 BI)之間的相關(guān)性(見表 4)。
使用費(fèi)希爾變換來評估相關(guān)變化的顯著性,主要將相關(guān)系數(shù)檢驗(yàn)中的相關(guān)系數(shù) R 轉(zhuǎn)換成 Z 檢驗(yàn)統(tǒng)計(jì)量。PU 和 PEU(△R = .16,z = 3.07,p = .002),PU 和 BI(△R = .17,z = 3.33,p <.001),以及 PEU 和 BI(△R = .19 ,z = 3.06,p = .002)之間的相關(guān)性都顯著增加了,而 Trust 和 PU 之間僅略微增加(△R = .11,z = 1.87,p = .062)。Trust 和 PEU(△R = .10,z = 1.51,p = .130),Trust 和 BI(△R = .03,z = 0.36,p = .716)之間的相關(guān)性沒有變化。六個相關(guān)性中有四個顯著或略微增加,表明 AV 體驗(yàn)增加了相關(guān)結(jié)構(gòu)之間的一致性。
4.2結(jié)構(gòu)模型
本節(jié)首先在結(jié)構(gòu)模型層面測試評價(jià)了 AV 體驗(yàn)的影響。然后,在參與者的 AV 體驗(yàn)之后,檢查了完整的結(jié)構(gòu)模型,確定了影響 BI 和 WTR 的心理決定因素。
4.2.1 TAM模型
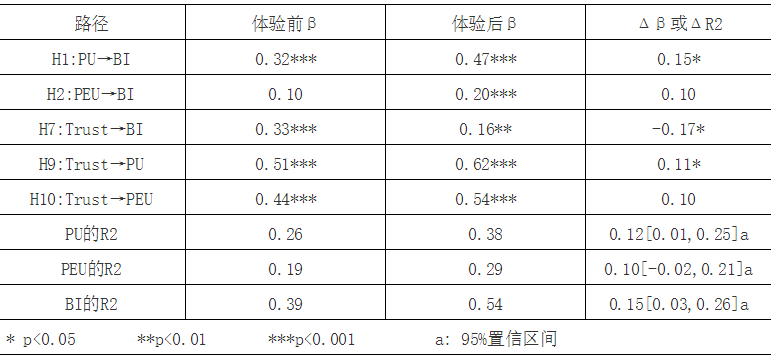
首先,我們在傳統(tǒng)的TAM模型中加入了 Trust,然后我們基于參與者體驗(yàn) AV 前后的收集數(shù)據(jù)使用 PLS 分析該 TAM 模型。我們進(jìn)行了三種類型的比較。第一,檢查這些路徑(見表 5)的重要性,發(fā)現(xiàn) AV 體驗(yàn)使感知易用性成為行為意向的一個重要預(yù)測因子。第二,比較了路徑系數(shù)。這兩個模型(體驗(yàn)前后)展示了三種不同的路徑:PU→ BI(H1:△β=0.15,p = .039),Trust→BI(H7:△β=-0.17,p = .017)和 Trust→PU(H9:△β=0.11,p = .017)。Trust 和 BI 之間的相關(guān)性沒有變化(△R= .03)(見表 4),但它們的路徑系數(shù)下降了(△β= -0.17),可能是因?yàn)?AV 體驗(yàn)加劇了 PU 和 PEU 對 BI 的影響。第三,比較了參與者 AV 體驗(yàn)前后 PU、PEU 和 BI 的解釋方差(R2)之間的比例差異。PU 和 BI△R2 的 95% 置信區(qū)間是 PU(△R2= .12)和 BI(△R2= .15),表明直接體驗(yàn)顯著增加了 PU 和 BI 的解釋力。
表 5 AV 體驗(yàn)前后的路徑系數(shù)β和解釋方差 R2
4.2.2結(jié)構(gòu)模型的完善
以下分析包括調(diào)解和預(yù)測分析,是特定于完善圖 1 中的結(jié)構(gòu)模型。如圖 4 所示,結(jié)果支持除一個假設(shè)之外的所有假設(shè),即 PEU 不是 WTR(H4:β=- .05,p = .422)的重要預(yù)測因子。
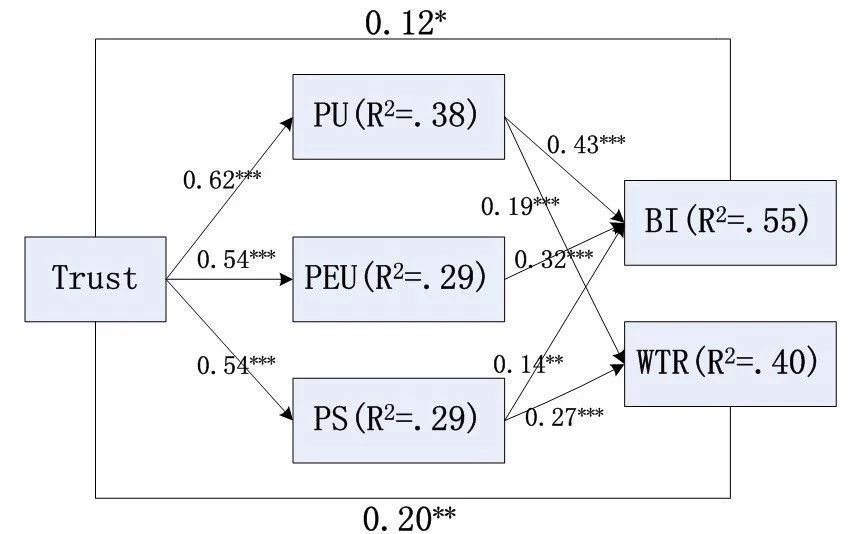
圖 4 完整結(jié)構(gòu)模型
對于完整的結(jié)構(gòu)模型,BI 和 WTR 的 R2 值分別為 0.55 和 0.40,大于 0.10 的截止值。對于 PU,PEU 和 PS,所有 R2 值均大于 0.05。因此,研究模型對所有內(nèi)生變量具有可接受的解釋力。
擬合優(yōu)度(GoF)標(biāo)準(zhǔn)用作 PLS 的全局?jǐn)M合度量,范圍從 0.00 到 1.00。擬合優(yōu)度 GoF 定義為 AVE 和內(nèi)生變量 R2 均值的幾何平均值。GoF 標(biāo)準(zhǔn)是 0.10,0.25 和 0.36,分別適用于小、中、大三種影響程度。本文的 GoF 計(jì)算為 0.55,大于大影響程度的截止值 0.36。
我們在傳統(tǒng) TAM 模型上增加了 Trust 和 PS,并將新模型與傳統(tǒng) TAM 模型(PU 和 PEU 兩個預(yù)測因子)進(jìn)行了比較。新模型中,BI 和 WTR 的 R2 值分別增加 0.01(F(2,293)=17.6,p<0.001),0.4(F(2,293)=47.1,p<0.001)。因此,在 TAM 模型中增加 Trust 和 PS 被證明是有意義的,特別是對于解釋 WTR。
先前的研究表明人們對 AV 的感知和態(tài)度與他們的社會人口學(xué)特征有關(guān)。Liu 等(2018)表示在設(shè)計(jì)和應(yīng)用新型交通技術(shù)時,應(yīng)當(dāng)考慮這些人口學(xué)特征的差異,因此確實(shí)有必要考慮人口統(tǒng)計(jì)學(xué)變量。本文的研究中收集統(tǒng)計(jì)了性別、之前是否聽說過 L5 級完全自主駕駛車輛、是否擁有駕駛執(zhí)照這三個人口統(tǒng)計(jì)學(xué)變量。分析過程中,在控制好這些統(tǒng)計(jì)學(xué)變量對模型中六種結(jié)構(gòu)產(chǎn)生影響的前提下,重新檢查了圖 4 中的結(jié)構(gòu)模型。
4.3中介效應(yīng)分析
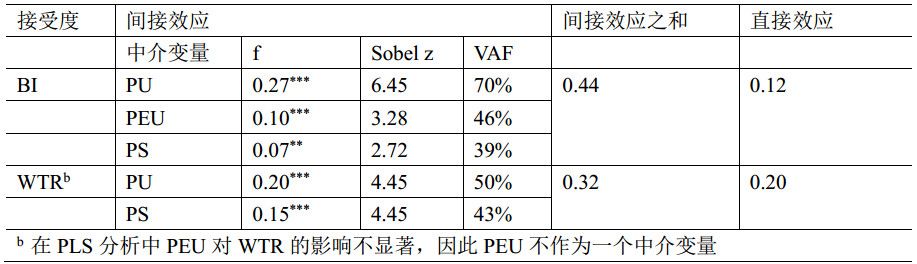
假設(shè) Trust 通過 PU、PEU、PS 三個因素間接影響接受度。使用 Sobel 的 z 方法理論來檢查 Trust 對對接受度的間接效應(yīng)。計(jì)算方差占比(VAF)來確定間接效應(yīng)對全局效應(yīng)(直接效應(yīng)+間接效應(yīng))的強(qiáng)度。使用經(jīng)驗(yàn)法則來確定中介效應(yīng)(即間接效應(yīng)):VAF> 80%,完全中介;VAF <=80%,部分中介;VAF <20%,無中介。
如表 6 顯示,PU、PEU 和 PS 對 Trust→BI 的起到顯著的中介作用(ps <.01)。它們的 VAF 值介于 39% 至 70% 之間,超過了 20% 的閾值水平,表明它們對 Trust→BI 關(guān)系具有部分中介作用。同樣地,在 trust→WTR 關(guān)系中 PU 和 PS 也是顯著的中介變量(ps <.001 和 VAF> 20%)。與其他中介變量相比,PU 對信任的間接效應(yīng)的影響更大。Trust 的間接效應(yīng)高于對兩種接受度的直接效應(yīng)(見表 6)。
表 6 Trust 的直接和間接效應(yīng)
5.結(jié)論
大規(guī)模采用 AVs 的最大障礙可能是心理上的,而不是技術(shù)上的。了解哪些因素以及它們?nèi)绾斡绊懭藗儗?AV 的接受度和使用至關(guān)重要。嚴(yán)重依賴對擁有很少有或沒有 AV 體驗(yàn)實(shí)驗(yàn)者的在線或紙質(zhì)調(diào)查數(shù)據(jù)來評估公眾接受度已經(jīng)受到質(zhì)疑。本實(shí)地研究有助于理解直接體驗(yàn)對 AV 接受度的影響,影響接受度的決定因素以及這些因素的關(guān)聯(lián),并找出哪些決定因素可以解釋和預(yù)測 AV 接受度。本現(xiàn)場實(shí)驗(yàn)邀請了在可預(yù)見將來將是 AV 早期使用者的 300 名學(xué)生,體驗(yàn)自動駕駛中的九個復(fù)雜場景。他們對 AV 的直接體驗(yàn)被發(fā)現(xiàn)增加了他們對 L5 級自動駕駛車輛 SDV 相關(guān)的 Trust 和兩種認(rèn)知信念(感知有用性和感知易用性),并且特別地發(fā)現(xiàn)這兩種認(rèn)知信念更能預(yù)測使用 SDV 的行為意圖。感知有用性、信任度和感知安全性是參與者使用 SDV 的行為意向和愿意重新乘坐 AV 的積極預(yù)測因素。信任度對 AV 接受產(chǎn)生了直接影響,也產(chǎn)生了間接影響。目前的研究結(jié)果為設(shè)計(jì)和推廣提供了有用的見解 AVS 標(biāo)準(zhǔn)。
結(jié)論 1:直接體驗(yàn)?zāi)茉鰪?qiáng)人們對 AV 的 Trust、PU、PEU;
結(jié)論 2:Trust、PU、PS 均與 BI、WTR 呈正相關(guān),即直接影響 BI、WTR;
Ps1:Trust 不僅直接影響 BI、WTR,而且能通過其他因素間接影響 BI、WTR;
Ps2:PEU 只能在體驗(yàn)后預(yù)測 BI,與 WTR 無相關(guān)性;
結(jié)論 3:本文提出的模型具有對 AV 接受度的預(yù)測能力。
-
汽車電子
+關(guān)注
關(guān)注
3037文章
8338瀏覽量
170057 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14302瀏覽量
170480
原文標(biāo)題:基于現(xiàn)場試驗(yàn)的自動駕駛汽車接受度研究
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛汽車是如何準(zhǔn)確定位的?

光庭信息自動駕駛試驗(yàn)車赴日

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動駕駛# 自動駕駛出租車# 京東自動駕駛快遞車
NVIDIA Halos自動駕駛汽車安全系統(tǒng)發(fā)布
理想汽車推出全新自動駕駛架構(gòu)
自動駕駛的未來 - 了解如何無縫、可靠地完成駕駛

百度獲香港首個自動駕駛先導(dǎo)牌照
MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
MITRE數(shù)字試驗(yàn)場將加速驗(yàn)證自動駕駛汽車
自動駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論