在許多領(lǐng)域都需要各種電機(jī),包括知名的步進(jìn)電機(jī)和伺服電機(jī)。但是,對(duì)于許多用戶而言,他們不了解這兩種電機(jī)的主要區(qū)別,因此他們始終不知道如何選擇。那么,步進(jìn)電機(jī)和伺服電機(jī)之間的主要區(qū)別是什么?基本結(jié)構(gòu)
2023-08-22 08:08:47 757
757 
在許多領(lǐng)域都需要各種電機(jī),包括知名的步進(jìn)電機(jī)和伺服電機(jī)。但是,對(duì)于許多用戶而言,他們不了解這兩種電機(jī)的主要區(qū)別,因此他們始終不知道如何選擇。那么,步進(jìn)電機(jī)和伺服電機(jī)之間的主要區(qū)別是什么?
2023-08-21 10:14:15471 
選擇防爆電機(jī)類型,是根據(jù)具體應(yīng)用需求和系統(tǒng)要求而定。以下是防爆伺服電機(jī)和防爆步進(jìn)電機(jī)的一些特點(diǎn)和比較,以幫助您做出選擇。防爆伺服電機(jī)優(yōu)點(diǎn):高精度和高動(dòng)態(tài)響應(yīng):伺服電機(jī)具有閉環(huán)控制系統(tǒng),可以實(shí)現(xiàn)更精
2023-07-31 22:29:06193 如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)?
2023-07-24 11:01:45190 選擇步進(jìn)電機(jī)時(shí)首先要考慮各種步進(jìn)電機(jī)的優(yōu)缺點(diǎn),根據(jù)設(shè)備的具體要求選擇合適的電機(jī)。在這里先介紹不同相數(shù)的步進(jìn)電機(jī)的優(yōu)缺點(diǎn):
2023-07-21 17:27:11203 步進(jìn)電機(jī)和伺服電機(jī)的性能差異源自他們不同的電機(jī)設(shè)計(jì)方案。步進(jìn)電機(jī)的極數(shù)比伺服電機(jī)多得多,因此步進(jìn)電機(jī)旋轉(zhuǎn)一整圈,所需的繞組電流交換次數(shù)要多得多,從而導(dǎo)致在速度增加的情況下,其轉(zhuǎn)矩迅速下降。
2023-07-13 10:53:45472 
在直流電機(jī),伺服電機(jī)和步進(jìn)電機(jī)之間進(jìn)行選擇是一項(xiàng)艱巨的任務(wù),包括在眾多設(shè)計(jì)因素之間取得平衡,即成本,速度,轉(zhuǎn)矩,加速度以及驅(qū)動(dòng)電路,在選擇最佳方案時(shí)都起著至關(guān)重要的作用。您的應(yīng)用的電動(dòng)機(jī)。
2023-07-09 16:22:08871 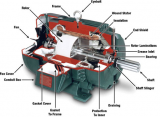
電動(dòng)伺服系統(tǒng)的一般結(jié)構(gòu)為三個(gè)閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對(duì)于交流伺服驅(qū)動(dòng)器,可通過(guò)對(duì)其內(nèi)部功能參數(shù)進(jìn)行人工設(shè)定而實(shí)現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。那么關(guān)于伺服電機(jī)有哪些需要知道的呢?
2023-06-26 10:13:17132 伺服電機(jī)跟步進(jìn)電機(jī)的區(qū)別
2013-08-22 17:44:08
,同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的精度(線數(shù))也就是說(shuō)伺服電機(jī)本身具備發(fā)出脈沖的功能,它每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣伺服驅(qū)動(dòng)器和伺服電機(jī)編碼器的脈沖形成了呼應(yīng),所以它是閉環(huán)控制,步進(jìn)電機(jī)是開(kāi)環(huán)控制。
2023-06-13 11:18:39761 步進(jìn)伺服和步進(jìn)電機(jī)都是一種設(shè)備,但它們的工作原理和控制方式有所不同。 步進(jìn)電機(jī)是一種常見(jiàn)的電動(dòng)機(jī),其工作原理是通過(guò)交替通電使電機(jī)轉(zhuǎn)子按照一定的步距旋轉(zhuǎn)。步進(jìn)電機(jī)通常采用開(kāi)環(huán)控制方式,即根據(jù)輸入的脈沖
2023-06-13 08:30:02259 哪些需要知道的呢?1.如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)?主要視具體應(yīng)用情況而定,簡(jiǎn)單地說(shuō)要確定:負(fù)載的性質(zhì)(如水平還是垂直負(fù)載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求
2023-06-08 09:50:21210 根據(jù)電機(jī)的電流,配用大于或等于此電流的驅(qū)動(dòng)器。如果需要低振動(dòng)或高精度時(shí),可配用細(xì)分型驅(qū)動(dòng)器。對(duì)于大轉(zhuǎn)矩電機(jī),盡可能用高電壓型驅(qū)動(dòng)器,以獲得良好的高速性能。
2023-06-03 11:24:11165 選擇伺服電機(jī)和步進(jìn)電機(jī)?主要視具體應(yīng)用情況而定,簡(jiǎn)單地說(shuō)要確定:負(fù)載的性質(zhì)(如水平還是垂直負(fù)載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求(如對(duì)端口界
2023-05-31 09:35:29166 電機(jī)力矩是否足夠大,能否帶動(dòng)負(fù)載,因此我們一般推薦用戶選型時(shí)要選用力矩比實(shí)際需要大50%~100% 的電機(jī),因?yàn)?b style="color: red">步進(jìn)電機(jī)不能過(guò)負(fù)載運(yùn)行,哪怕是瞬間,都會(huì)造成失步,嚴(yán)重時(shí)停轉(zhuǎn)或不規(guī)則原地反復(fù)動(dòng)。
2023-05-29 16:10:04395 選擇步進(jìn)電機(jī)時(shí)首先要考慮各種步進(jìn)電機(jī)的優(yōu)缺點(diǎn),根據(jù)設(shè)備的具體要求選擇合適的電機(jī)。
2023-05-22 09:06:04136 如果在交流電源和驅(qū)動(dòng)器直流總線(如變壓器)之間沒(méi)有隔離的話,不要將直流總線的非隔離端口或非隔離信號(hào)的地接大地,這可能會(huì)導(dǎo)致設(shè)備損壞和人員傷害。因?yàn)榻涣鞯墓搽妷翰⒉皇菍?duì)大地的,在直流總線地和大地之間可能會(huì)有很高的電壓。
2023-04-24 17:15:57303 步進(jìn)電機(jī)和伺服電機(jī)哪個(gè)好,這個(gè)沒(méi)有絕對(duì)的答案,適合的才是最好的!下面從步進(jìn)電機(jī)和伺服電機(jī)各種的優(yōu)缺點(diǎn)、性能特點(diǎn)
進(jìn)行分析:
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:32 4
4 在定位系統(tǒng)中,最常用的電機(jī)不外乎是步進(jìn)電機(jī)和伺服電機(jī),其中步進(jìn)電機(jī)主要可分為2相、5相、微步進(jìn)統(tǒng),伺服電機(jī)則主要分為DC伺服和AC伺服兩種。
2相、5相和微步進(jìn)系統(tǒng)主要是驅(qū)動(dòng)器所表現(xiàn)出來(lái)分辨率
2023-03-22 10:38:501 ??步進(jìn)電機(jī)作為一種開(kāi)環(huán)控制的系統(tǒng),和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國(guó)內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電機(jī)的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機(jī)也越來(lái)越多地應(yīng)用于數(shù)字控制系統(tǒng)中
2023-03-21 14:55:020 為您的應(yīng)用選擇正確類型的步進(jìn)電機(jī)
2023-03-09 15:16:35387 
最好的電機(jī)是滿足應(yīng)用要求的電機(jī)。然而,當(dāng)伺服電機(jī)和步進(jìn)電機(jī)都滿足定位應(yīng)用的基本要求時(shí),對(duì)這兩種技術(shù)有更深入的了解以做出明智的決定就很重要了。
2023-03-09 15:16:28729 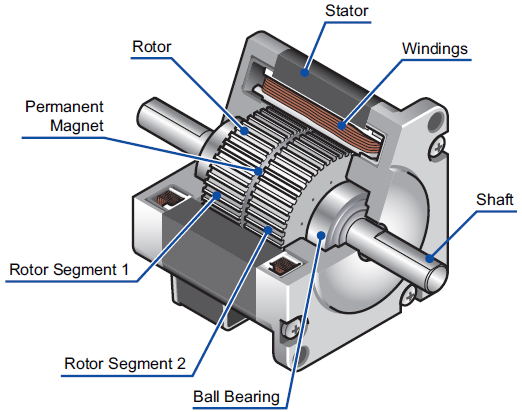
步進(jìn)電機(jī)和伺服電機(jī)都是常見(jiàn)的電機(jī)類型,它們?cè)诟鞣N工業(yè)和商業(yè)應(yīng)用中都有廣泛的應(yīng)用。
2023-03-09 14:22:322612 一般情況下,伺服電機(jī)的精度要高于步進(jìn)電機(jī)。伺服電機(jī)可以根據(jù)反饋信號(hào)實(shí)時(shí)調(diào)整輸出的電流和位置,能夠更加精準(zhǔn)地控制位置和速度。而步進(jìn)電機(jī)只能按照預(yù)設(shè)的步數(shù)和速度運(yùn)轉(zhuǎn),難以在高速和負(fù)載變化的情況下保持穩(wěn)定的精度。然而,在低速、低負(fù)載、短行程等應(yīng)用場(chǎng)景下,步進(jìn)電機(jī)也可以達(dá)到較高的精度。
2023-03-09 10:45:584633 步進(jìn)電機(jī)的旋轉(zhuǎn)角度是由控制信號(hào)驅(qū)動(dòng),每個(gè)控制信號(hào)都會(huì)使步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一定的角度,因此步進(jìn)電機(jī)的運(yùn)動(dòng)是“離散”的。而伺服電機(jī)則是通過(guò)控制電機(jī)的電流或電壓來(lái)控制電機(jī)的旋轉(zhuǎn)角度,因此伺服電機(jī)的運(yùn)動(dòng)是“連續(xù)”的。
2023-03-09 10:44:592659 步進(jìn)電機(jī)和伺服電機(jī)是兩種常見(jiàn)的電機(jī)類型,它們的應(yīng)用場(chǎng)景和控制方式不同,下面是它們的區(qū)別和選型方法:
步進(jìn)電機(jī)是一種開(kāi)環(huán)控制電機(jī),控制信號(hào)為脈沖信號(hào),通過(guò)控制脈沖數(shù)量和頻率來(lái)控制電機(jī)的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)具有簡(jiǎn)單的控制方式、低成本和較高的精度,但通常不能提供高速運(yùn)動(dòng)和高負(fù)載扭矩。
2023-03-08 14:40:45957 步進(jìn)電機(jī)的慣量選擇需要考慮到兩個(gè)方面:
電機(jī)本身的慣量:電機(jī)的慣量越大,電機(jī)的加速和減速所需要的時(shí)間就越長(zhǎng)。因此,在選擇步進(jìn)電機(jī)時(shí),需要根據(jù)應(yīng)用需求和控制系統(tǒng)的要求綜合考慮電機(jī)的慣量
2023-03-08 14:26:402277 步進(jìn)電機(jī)和伺服電機(jī)都是常見(jiàn)的電動(dòng)機(jī)種類,它們有著不同的工作原理和應(yīng)用場(chǎng)合。
步進(jìn)電機(jī)是一種定角度運(yùn)轉(zhuǎn)的電動(dòng)機(jī),它的轉(zhuǎn)動(dòng)是根據(jù)外部提供的脈沖信號(hào)來(lái)實(shí)現(xiàn)的。步進(jìn)電機(jī)具有精度高、控制簡(jiǎn)單、適合低速運(yùn)動(dòng)等特點(diǎn),適用于需要高精度定位控制的場(chǎng)合,如印刷機(jī)、繪圖儀、數(shù)碼相機(jī)等。
2023-03-07 17:59:043317 伺服電機(jī)和步進(jìn)電機(jī)都可以達(dá)到高精度的要求,但是伺服電機(jī)通常比步進(jìn)電機(jī)具有更高的精度。這是因?yàn)?b style="color: red">伺服電機(jī)采用了閉環(huán)控制系統(tǒng),可以通過(guò)實(shí)時(shí)的反饋控制,準(zhǔn)確地控制電機(jī)的位置、速度和轉(zhuǎn)矩等參數(shù),從而保證了更高的控制精度。同時(shí),伺服電機(jī)具有更高的響應(yīng)速度和更好的動(dòng)態(tài)性能,可以在更短的時(shí)間內(nèi)響應(yīng)和調(diào)整輸出參數(shù)。
2023-03-07 15:05:093027 根據(jù)電機(jī)的電流,配用大于或等于此電流的驅(qū)動(dòng)器。如果需要低振動(dòng)或高精度時(shí),可配用細(xì)分型驅(qū)動(dòng)器。對(duì)于大轉(zhuǎn)矩電機(jī),盡可能用高電壓型驅(qū)動(dòng)器,以獲得良好的高速性能。
2023-02-08 09:50:47405 步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國(guó)內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電機(jī)的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機(jī)也越來(lái)越多地應(yīng)用于數(shù)字控制系統(tǒng)中
2023-01-11 17:58:34397 什么是
伺服電機(jī)?是運(yùn)動(dòng)
電機(jī)類型為永磁同步
電機(jī)的才算嗎?并不是。其實(shí),
伺服電機(jī)是一個(gè)大的泛稱,無(wú)論你的運(yùn)動(dòng)
電機(jī)類型是永磁同步
電機(jī),直流無(wú)刷
電機(jī),還是
步進(jìn)電機(jī),只要加了編碼器就都可以叫
伺服電機(jī),因?yàn)?/div>
2022-11-05 10:15:384295 無(wú)論是步進(jìn)電機(jī),還是伺服電機(jī),它們都為現(xiàn)代化的工業(yè)生產(chǎn)立下了不朽的功勞。但正所謂文無(wú)第一,武無(wú)第二,強(qiáng)強(qiáng)相遇,還是要分個(gè)高下的。下面,我們就從這幾個(gè)維度對(duì)比下步進(jìn)電機(jī)以及伺服電機(jī),看看我們?cè)趯?shí)際工作中選擇哪個(gè)更為合適。
2022-04-27 13:31:005241 伺服電機(jī)和步進(jìn)電機(jī)有什么不同?伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。兩種設(shè)備在工業(yè)自動(dòng)化控制中有著非常廣泛的應(yīng)用。
2022-01-04 19:43:2925979 要想?yún)^(qū)分伺服電機(jī)和步進(jìn)電機(jī),先要了解兩種設(shè)備的區(qū)別。接下來(lái)給大家分享一下。
2021-10-02 11:32:0050000 步進(jìn)電機(jī)的外觀看起來(lái)要比伺服電機(jī)更粗糙一些。
2021-08-26 16:47:4116336 步進(jìn)電機(jī)和伺服電機(jī)是常見(jiàn)的工業(yè)電子裝置,通常被應(yīng)用在工業(yè)自動(dòng)控制系統(tǒng)中,然而許多人不知道如何 辨別步進(jìn)電機(jī)和伺服電機(jī),在這篇文將分享步進(jìn)電機(jī)和伺服電機(jī)的辨別方法及區(qū)別,希望對(duì)讀者有所幫助。
2021-07-19 14:33:3936889 現(xiàn)如今是科技發(fā)展迅猛的時(shí)代,人們?cè)?b style="color: red">選擇直線模組時(shí)都會(huì)疑惑到底選擇伺服電機(jī)還是步進(jìn)電機(jī)。 直線模組是一種自動(dòng)化直線傳動(dòng)設(shè)備,但它本身不具備驅(qū)動(dòng)力,需要額外的驅(qū)動(dòng)設(shè)備進(jìn)行驅(qū)動(dòng),來(lái)實(shí)現(xiàn)整個(gè)直線模組的運(yùn)轉(zhuǎn)
2021-01-11 11:35:373941 步進(jìn)電機(jī)和伺服電機(jī)在工業(yè)傳動(dòng)控制領(lǐng)域都是重要的控制部件,應(yīng)用面廣泛。但是步進(jìn)電機(jī)和伺服電機(jī)有什么不同呢?
2020-12-14 21:28:35766 步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別辦法如下:力矩計(jì)劃:步進(jìn)電機(jī)系一同般為中小力矩(通常在40Nm以下)計(jì)劃;伺服電機(jī)體系可完畢全計(jì)劃。
2020-09-25 10:15:335608 步進(jìn)電機(jī)和伺服電機(jī)的辨別方法如下:力矩范圍:步進(jìn)電機(jī)系統(tǒng)一般為中小力矩(一般在40Nm以下)范圍;伺服電機(jī)系統(tǒng)可實(shí)現(xiàn)全范圍。
2020-09-11 10:27:177859 在許多領(lǐng)域都需要各種電機(jī),包括知名的步進(jìn)電機(jī)和伺服電機(jī)。但是,對(duì)于許多用戶而言,他們不了解這兩種電機(jī)的主要區(qū)別,因此他們始終不知道如何選擇。那么,步進(jìn)電機(jī)和伺服電機(jī)之間的主要區(qū)別是什么? 基本結(jié)構(gòu)
2020-09-10 17:47:3426236 最簡(jiǎn)單的方法是在負(fù)載軸上增加一個(gè)杠桿,用彈簧秤拉動(dòng)杠桿,拉力乘以臂的長(zhǎng)度就是負(fù)載力矩。也可以根據(jù)負(fù)載特性進(jìn)行理論計(jì)算。由于步進(jìn)電機(jī)是控制型電機(jī),目前常用的步進(jìn)電機(jī)最大轉(zhuǎn)矩不超過(guò)45nm。
2020-08-08 09:19:001432 由于印刷機(jī)械的自動(dòng)化、規(guī)范化和數(shù)據(jù)化的迅速發(fā)展,印刷機(jī)械對(duì)微型電動(dòng)機(jī)的需求越來(lái)越多。目前在印刷設(shè)備中應(yīng)用較廣的步進(jìn)電機(jī)、伺服電動(dòng)機(jī)和測(cè)速發(fā)電機(jī)這三種電動(dòng)機(jī)。此篇詳細(xì)介紹步進(jìn)電機(jī)和伺服電機(jī)。
2020-02-24 08:57:241835 本文首先介紹了步進(jìn)電機(jī)和伺服電機(jī)的性能比較,其次介紹了伺服電機(jī)對(duì)比步進(jìn)電機(jī)的優(yōu)勢(shì),最后闡述了電機(jī)的選用原則以及如何正確選擇伺服電機(jī)和步進(jìn)電機(jī),具體的跟隨小編一起來(lái)了解一下。
2018-06-01 15:46:4617680 本文首先介紹了步進(jìn)電機(jī)和舵機(jī)及伺服電機(jī)的區(qū)別,其次介紹了步進(jìn)電機(jī)基本原理,最后介紹了舵機(jī)的構(gòu)造的原理及介紹了伺服電機(jī)的工作原理。
2018-05-11 08:45:27128089 人工設(shè)定而實(shí)現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。 那么關(guān)于伺服電機(jī)有哪些需要知道的呢?下面小編總結(jié)了伺服電機(jī)的28個(gè)你可能不知道問(wèn)題,一起來(lái)看一下吧。 1.如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)? 答:主要視具體應(yīng)用情況而
2017-10-12 17:03:5717 如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)?答:主要視具體應(yīng)用情況而定,簡(jiǎn)單地說(shuō)要確定:負(fù)載的性質(zhì)(如水平還是垂直負(fù)載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求(如對(duì)端口界面和通訊方面的要求),主要控制方式是位置
2017-09-29 19:08:546 步進(jìn)電機(jī)與伺服電機(jī)在工業(yè)控制中應(yīng)用非常廣泛,過(guò)程中不乏出現(xiàn)各種各樣的問(wèn)題,例如如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)?何時(shí)選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?使用電機(jī)時(shí)要注意的問(wèn)題?伺服電機(jī)的碼盤(pán)部分可以拆開(kāi)嗎?等等。。。
2017-09-05 10:54:3018 電機(jī)類調(diào)速器分為兩種1.步進(jìn)電機(jī)2.伺服電機(jī)。在基于間接數(shù)字控制模式的調(diào)速器中,全數(shù)字式交流伺服電機(jī)調(diào)速器比步進(jìn)電機(jī)具有優(yōu)越性。
2012-01-10 15:34:214447 步進(jìn)電機(jī)和交流伺服電機(jī)性能比較
步進(jìn)電機(jī)和交流伺服電機(jī)性能比較 步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國(guó)內(nèi)的數(shù)字
2010-02-06 10:25:44904 步進(jìn)電機(jī)和伺服電機(jī) 步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國(guó)內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電
2010-01-11 08:39:21919 伺服電機(jī)步進(jìn)電機(jī)區(qū)別
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)
2010-01-09 20:24:1235674 主要視具體應(yīng)用情況而定,簡(jiǎn)單地說(shuō)要確定:負(fù)載的性質(zhì)(如水平還是垂直負(fù)載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求(如對(duì)端口界面和通訊方面的要求)
2009-07-01 15:04:0028 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論