 電子發(fā)燒友App
電子發(fā)燒友App


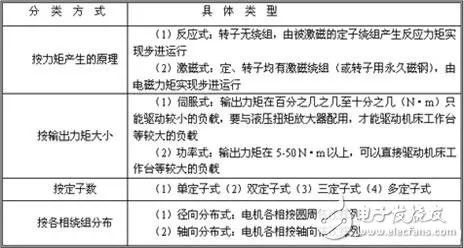
步進(jìn)電機(jī)又稱為脈沖電機(jī),基于最基本的電磁鐵原理,它是一種可以自由回轉(zhuǎn)的電磁鐵,其動(dòng)作原理是依靠氣隙磁導(dǎo)的變化來產(chǎn)生電磁轉(zhuǎn)矩。其原始模型是起源于年至年間。年前后開始以控制為目的的嘗試,應(yīng)用于氫弧燈的電極輸送機(jī)構(gòu)中。這被認(rèn)為是最初的步進(jìn)電機(jī)。二十世紀(jì)初,在電話自動(dòng)交換機(jī)中廣泛使用了步進(jìn)電機(jī)。由于西方資本主義列強(qiáng)爭奪殖民地,步進(jìn)電機(jī)在缺乏交流電源的船舶和飛機(jī)等獨(dú)立系統(tǒng)中得到了廣泛的使用。二十世紀(jì)五十年代后期晶體管的發(fā)明也逐漸應(yīng)用在步進(jìn)電機(jī)上,對于數(shù)字化的控制變得更為容易。到了八十年代后,由于廉價(jià)的微型計(jì)算機(jī)以多功能的姿態(tài)出現(xiàn),步進(jìn)電機(jī)的控制方式更加靈活多樣。
步進(jìn)電機(jī)相對于其它控制用途電機(jī)的最大區(qū)別是,它接收數(shù)字控制信號電脈沖信號并轉(zhuǎn)化成與之相對應(yīng)的角位移或直線位移,它本身就是一個(gè)完成數(shù)字模式轉(zhuǎn)化的執(zhí)行元件。而且它可開環(huán)位置控制,輸入一個(gè)脈沖信號就得到一個(gè)規(guī)定的位置增量,這樣的所謂增量位置控制系統(tǒng)與傳統(tǒng)的直流控制系統(tǒng)相比,其成本明顯減低,幾乎不必進(jìn)行系統(tǒng)調(diào)整。步進(jìn)電機(jī)的角位移量與輸入的脈沖個(gè)數(shù)嚴(yán)格成正比,而且在時(shí)間上與脈沖同步。因而只要控制脈沖的數(shù)量、頻率和電機(jī)繞組的相序,即可獲得所需的轉(zhuǎn)角、速度和方向。
我國的步進(jìn)電機(jī)在二十世紀(jì)七十年代初開始起步,七十年代中期至八十年代中期為成品發(fā)展階段,新品種和高性能電機(jī)不斷開發(fā),目前,隨著科學(xué)技術(shù)的發(fā)展,特別是永磁材料、半導(dǎo)體技術(shù)、計(jì)算機(jī)技術(shù)的發(fā)展,使步進(jìn)電機(jī)在眾多領(lǐng)域得到了廣泛應(yīng)用。
步進(jìn)電機(jī)控制技術(shù)及發(fā)展概況
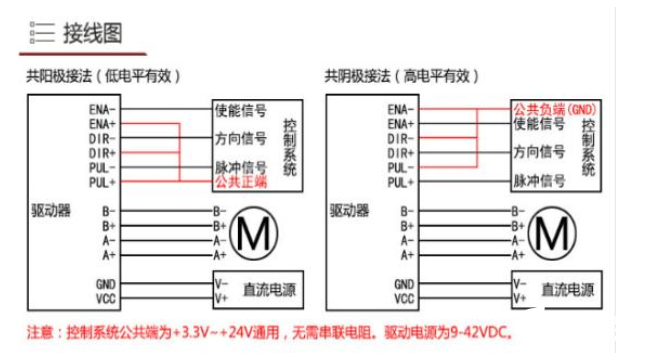
作為一種控制用的特種電機(jī),步進(jìn)電機(jī)無法直接接到直流或交流電源上工作,必須使用專用的驅(qū)動(dòng)電源步進(jìn)電機(jī)驅(qū)動(dòng)器。在微電子技術(shù),特別計(jì)算機(jī)技術(shù)發(fā)展以前,控制器脈沖信號發(fā)生器完全由硬件實(shí)現(xiàn),控制系統(tǒng)采用單獨(dú)的元件或者集成電路組成控制回路,不僅調(diào)試安裝復(fù)雜,要消耗大量元器件,而且一旦定型之后,要改變控制方案就一定要重新設(shè)計(jì)電路。這就使得需要針對不同的電機(jī)開發(fā)不同的驅(qū)動(dòng)器,開發(fā)難度和開發(fā)成本都很高,控制難度較大,限制了步進(jìn)電機(jī)的推廣。
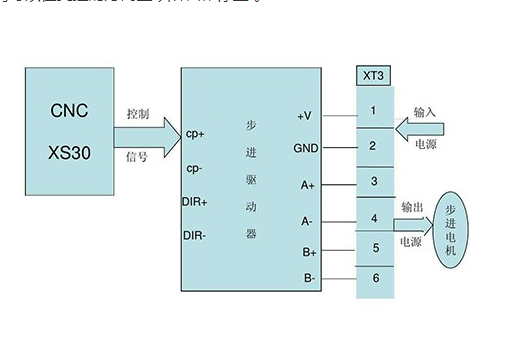
由于步進(jìn)電機(jī)是一個(gè)把電脈沖轉(zhuǎn)換成離散的機(jī)械運(yùn)動(dòng)的裝置,具有很好的數(shù)據(jù)控制特性,因此,計(jì)算機(jī)成為步進(jìn)電機(jī)的理想驅(qū)動(dòng)源,隨著微電子和計(jì)算機(jī)技術(shù)的發(fā)展,軟硬件結(jié)合的控制方式成為了主流,即通過程序產(chǎn)生控制脈沖,驅(qū)動(dòng)硬件電路。單片機(jī)通過軟件來控制步進(jìn)電機(jī),更好地挖掘出了電機(jī)的潛力。因此,用單片機(jī)控制步進(jìn)電機(jī)已經(jīng)成為了一種必然的趨勢,也符合數(shù)字化的時(shí)代趨。
步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)
傳統(tǒng)的電流式控制方法是檢測流經(jīng)繞組的電流,并將反饋信號送到控制芯片,然后由控制芯片決定是增加還是降低繞組電流,以取得所需的電流強(qiáng)度。這種控制方法使電機(jī)在寬轉(zhuǎn)速和寬電源電壓范圍內(nèi)保持理想的轉(zhuǎn)矩,非常適用于全步進(jìn)和半步進(jìn)電機(jī)驅(qū)動(dòng),而且實(shí)現(xiàn)起來非常容易。
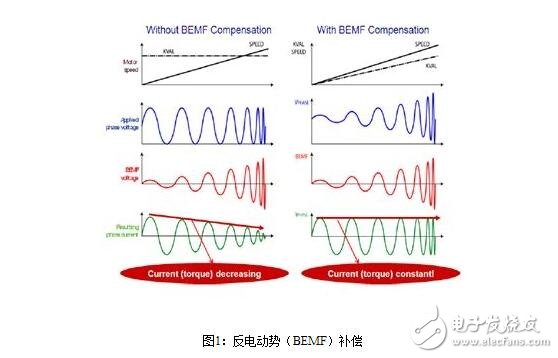
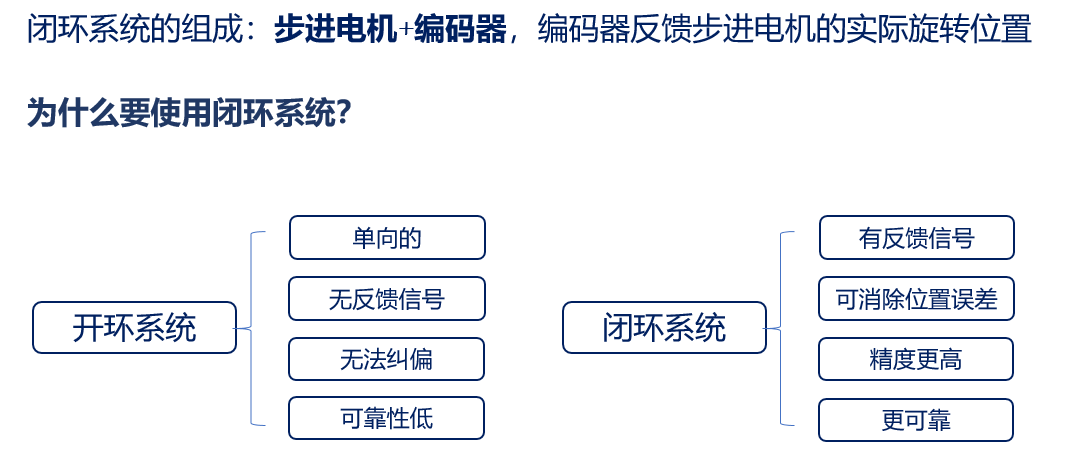
閉環(huán)控制電路將電流施加到繞組。反電動(dòng)勢(BEMF)會(huì)降低繞組電壓,延長電流達(dá)到理想值的時(shí)間,因此,反電動(dòng)勢限制電機(jī)轉(zhuǎn)速。雖然系統(tǒng)無需知道反電動(dòng)勢值,但是,不重視且不修正這個(gè)數(shù)值將會(huì)導(dǎo)致系統(tǒng)性能降低。
因?yàn)殡娫措妷鹤兓瘜?dǎo)致峰值電流有時(shí)波動(dòng)幅度很大,所以,直到現(xiàn)在,工程師還是盡量避免使用電壓式控制方法。工程師們還想避免反電動(dòng)勢隨著電機(jī)轉(zhuǎn)速增加而升高的問題。
在這種情況下,業(yè)內(nèi)出現(xiàn)了能夠補(bǔ)償反電動(dòng)勢的智能電壓式控制系統(tǒng)。這種驅(qū)動(dòng)方法使電機(jī)運(yùn)轉(zhuǎn)更順暢,微步分辨率更高,是對高精度定位和低機(jī)械噪聲要求嚴(yán)格的應(yīng)用的理想選擇。電壓式控制是一種開環(huán)控制:當(dāng)正弦電壓施加到電機(jī)相位時(shí),機(jī)電系統(tǒng)將回饋正弦電流。
我們可以用數(shù)字方法補(bǔ)償反電動(dòng)勢和峰流變化。在記住電機(jī)的準(zhǔn)確特性(電機(jī)電感-轉(zhuǎn)速曲線、反電動(dòng)勢-轉(zhuǎn)速曲線、電機(jī)電阻)后,計(jì)算并施加電壓,以取得理想的電流值。
電壓式控制方法是向電機(jī)施加電壓,而不是恒流。施加的電壓值能夠補(bǔ)償并完全消除反電動(dòng)勢效應(yīng),施加電壓的上升速率與因電機(jī)轉(zhuǎn)速增加而導(dǎo)致反電動(dòng)勢上升的速率相同,保證電流幅度對轉(zhuǎn)速曲線平坦。在已知所需電流后,就可以確定取得該電流需要施加的準(zhǔn)確電壓值。因此,電流是由電壓間接控制,如圖1所示。
電壓式控制還節(jié)省了分流電阻,可取得高微步分辨率和極低的轉(zhuǎn)矩脈動(dòng)。事實(shí)上,意法半導(dǎo)體的L6470取得了多達(dá)128步的微步控制。
這款數(shù)字電機(jī)控制驅(qū)動(dòng)器的核心是一個(gè)能夠降低微控制器資源占用率的數(shù)字運(yùn)動(dòng)引擎(DME)。
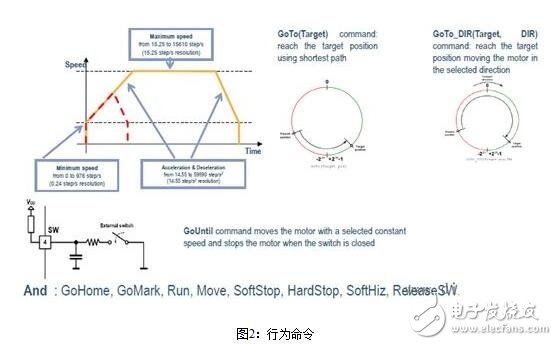
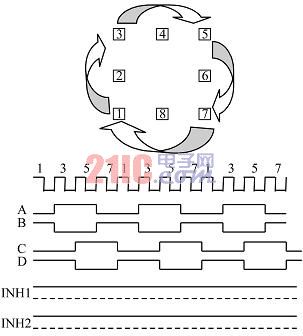
數(shù)字運(yùn)動(dòng)控制引擎是由行為命令控制,例如,絕對位置請求,并按照預(yù)設(shè)轉(zhuǎn)速曲線邊界驅(qū)動(dòng)電機(jī)運(yùn)動(dòng)。全部指令集包括相對位置和絕對位置(達(dá)到目標(biāo)位置)、轉(zhuǎn)速跟蹤(達(dá)到并保持目標(biāo)轉(zhuǎn)速)和電機(jī)停止順序,還包括機(jī)械位置傳感器管理專用命令。圖2所示是前述部分命令。
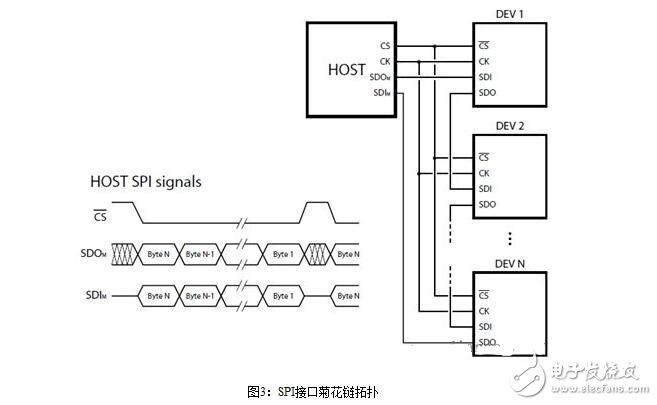
該控制器通過具有菊花鏈功能的高速SPI總線接口與主微控制器通信。
通過一個(gè)串行接口,一個(gè)微控制器能夠管理多個(gè)控制器,從而控制多臺(tái)步進(jìn)電機(jī),如圖3所示。
步進(jìn)電機(jī)的開環(huán)控制
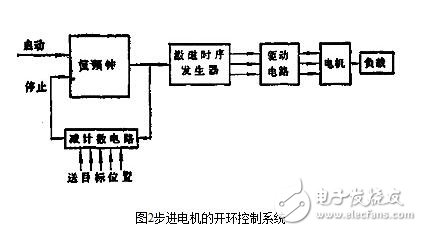
系統(tǒng)設(shè)計(jì)時(shí)首先考慮穩(wěn)態(tài)性能。由允許的最大位置誤差和要求的最高步進(jìn)頻率選擇步進(jìn)電機(jī)和驅(qū)動(dòng)電路。完成了這種選擇之后,接下來應(yīng)考慮怎樣對電機(jī)和驅(qū)動(dòng)電路進(jìn)行控制,怎樣把它們連接到系統(tǒng)的其他部分。開環(huán)控制具有簡單因而成本低等優(yōu)點(diǎn),常用于簡易的經(jīng)濟(jì)型數(shù)控機(jī)床改造等技術(shù)中。圖1是典型的開環(huán)控制系統(tǒng)的方框圖。相控制信號可以由微處理機(jī)產(chǎn)生,也可以用某種形式的時(shí)序電路產(chǎn)生。不管這種信號怎樣產(chǎn)生,設(shè)計(jì)者都需要知道它在定時(shí)上有些什么限制。例如特定負(fù)載轉(zhuǎn)矩的最高步進(jìn)頻率;又如電機(jī)加速負(fù)載慣量的時(shí)間等。
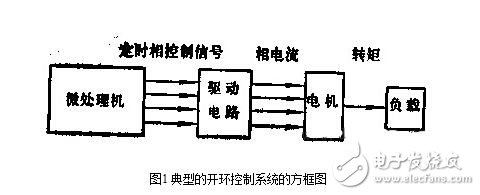
開環(huán)控制方案中,負(fù)載位置對控制電路沒有反饋,因此,步進(jìn)電機(jī)必須正確地響應(yīng)每次激磁變化。如果激磁變化太快,電機(jī)不能夠移動(dòng)到新的要求的位置,那么,實(shí)際的負(fù)載位置相對控制器所期待的位置將出現(xiàn)永久誤差。如果負(fù)載參數(shù)基本上不隨時(shí)間變化,則相控制信號的定時(shí)比較簡單。但是,在負(fù)載可能變化的應(yīng)用場合中,定時(shí)必須以最壞(即最大負(fù)載)情況進(jìn)行設(shè)定。當(dāng)然,這樣確定的控制方案對所有其他負(fù)載并非最佳。
1. 啟停頻率
最簡單的開環(huán)控制方式是步進(jìn)頻率恒定的那種控制方式(圖2),電機(jī)在達(dá)到目標(biāo)位置之前都以這個(gè)頻率轉(zhuǎn)動(dòng)。相控制信號由時(shí)序發(fā)生器產(chǎn)生,時(shí)序發(fā)生器由來自恒頻時(shí)鐘的步進(jìn)命令脈沖觸發(fā)。“啟動(dòng)”信號接通這個(gè)時(shí)鐘,使電機(jī)以等于鐘頻的步進(jìn)頻率運(yùn)行;“停止”信號關(guān)斷這個(gè)時(shí)鐘,使電機(jī)停轉(zhuǎn)。轉(zhuǎn)動(dòng)方向一開始就送到相時(shí)序發(fā)生器,因此,它產(chǎn)生的相控制信號能以合適的方向運(yùn)轉(zhuǎn)電機(jī)。目標(biāo)位置送入減法計(jì)數(shù)器,并以這個(gè)計(jì)數(shù)器記錄執(zhí)行的步致。時(shí)鐘脈沖同時(shí)送給相時(shí)序發(fā)生器和減法計(jì)數(shù)器。于是,相激勵(lì)以恒定的鐘頻變化,減法計(jì)數(shù)器記錄電機(jī)相對目標(biāo)的瞬時(shí)位置。
負(fù)載達(dá)到目標(biāo)位置時(shí),減法計(jì)數(shù)器的內(nèi)容成為零。時(shí)鐘的“停止”信號利用這個(gè)零產(chǎn)生。如果恒定鐘統(tǒng)頻率太高,電機(jī)不能把負(fù)載慣量加速到對應(yīng)的步進(jìn)頻率;系統(tǒng)或者完全不能工作,或者在行程的開始階段失步。從靜止開始,電機(jī)能響應(yīng)而不失步的最高步進(jìn)頻率叫做“啟動(dòng)頻率”。與此類似,“停止頻率”是系統(tǒng)控制信號突然關(guān)斷,而電機(jī)不沖過目標(biāo)位置的最高步進(jìn)頻率。對任何電機(jī)-負(fù)載組合來講,啟動(dòng)頻率和停止頻率之間的差別都很小。粘性摩擦使加速度和步進(jìn)頻率降低,但有助于減速,因此,提高了停止頻率。不過,在簡單的恒頻系統(tǒng)里,時(shí)鐘必須調(diào)整在兩者之中較低的那個(gè)頻率上,以此確保可靠的啟動(dòng)和停止。
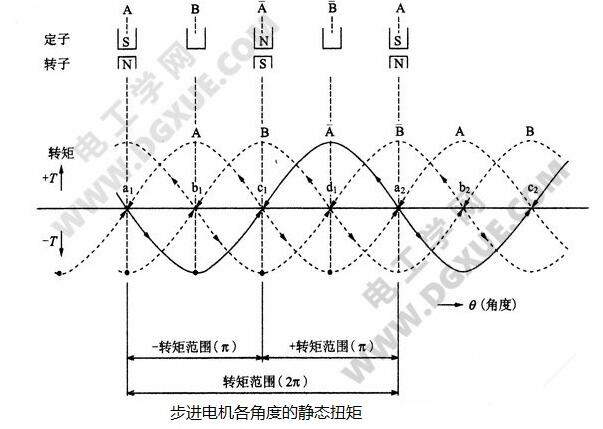
電機(jī)從靜止開始加速時(shí),步進(jìn)頻率很低;每相激磁周期比相電路的電氣時(shí)間常數(shù)長得多。在這種情況下,系統(tǒng)性能能夠用電機(jī)的靜轉(zhuǎn)短/轉(zhuǎn)子位置特性來分析。分析結(jié)果得知,(1)如果電機(jī)的轉(zhuǎn)矩(TM)增大或負(fù)載轉(zhuǎn)矩(TL)減小,則能提高啟動(dòng)額率;(2)減少系統(tǒng)慣量(電機(jī)慣量+負(fù)載慣量)也能提高啟動(dòng)頻率。
在系統(tǒng)工作壽命內(nèi).由于零部件磨損,將影響負(fù)載轉(zhuǎn)矩。為了允許負(fù)載轉(zhuǎn)矩略為變化,恒頻鐘應(yīng)比求得的啟動(dòng)頻率略低,且可調(diào)。為了確保系統(tǒng)在工作速度情況下對機(jī)械諧振不敏感,還應(yīng)考慮失步轉(zhuǎn)矩/頻率特性。如果算得啟動(dòng)頻率恰巧等于諧振頻率,那么,應(yīng)改用較低頻率的時(shí)鐘,或者通過增加阻尼降低諧振影響。實(shí)際工作中,啟動(dòng)頻率也常常通過試驗(yàn)求得。
2.加速和減速工作
因?yàn)椴竭M(jìn)電機(jī)系統(tǒng)的啟動(dòng)頻率比它的最高運(yùn)行頻率低得多,因此,為了減少定位時(shí)間,常常通過加速使電機(jī)在接近最高的速度下運(yùn)行。隨著目標(biāo)位置的逼近,為使電機(jī)平穩(wěn)地停下來,重新使步進(jìn)頻率逐漸降低到啟停電機(jī)頻率。從初始位置往目標(biāo)位置運(yùn)動(dòng)的整個(gè)過程中,步進(jìn)頻率都在變。若以曲線表示即得“速度曲線”,如圖3所示。注意;減速可以比加速快得多,因?yàn)樨?fù)載轉(zhuǎn)矩幫助系統(tǒng)
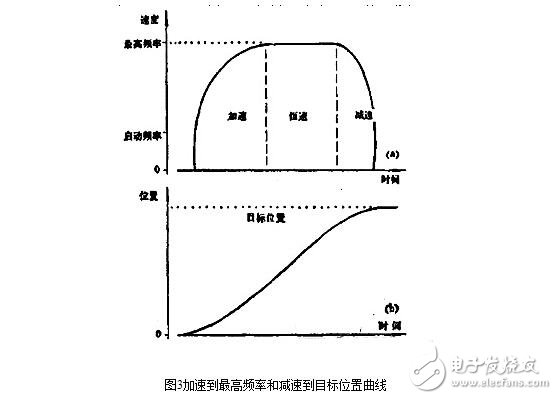
制動(dòng);而且,電機(jī)產(chǎn)生的減速轉(zhuǎn)矩比 (a)速度曲線;(b)對應(yīng)的位置/時(shí)間響應(yīng)曲線
加速轉(zhuǎn)矩大。
3.開環(huán)控制的實(shí)現(xiàn)
對任何系統(tǒng),選擇控制方式都要考慮性能高和成本低等要求。例如,為了使加速方式最佳,也許要求按指數(shù)曲線上升,但是,實(shí)現(xiàn)的費(fèi)用高。設(shè)計(jì)者也許會(huì)用比較簡單的線性斜坡來折衷,因?yàn)檫@種斜坡能以很低成本實(shí)現(xiàn)。另一方面,集成電路工藝的迅速發(fā)展,使我們能以低價(jià)制成的芯片得到各種各樣的電路功能,因此,估計(jì)以微處理機(jī)控制的潛在優(yōu)點(diǎn)成為很現(xiàn)實(shí)的問題。在微機(jī)控制的系統(tǒng)中,常常可以把微處理機(jī)的富裕處理能力用來控制步進(jìn)電機(jī)。這時(shí),額外的存貯器成本和軟件開發(fā)成本的增加很可能低于獨(dú)立的硬件控制器的價(jià)格。
(1)以微處理機(jī)產(chǎn)生定時(shí) 微處理機(jī)很容易產(chǎn)生控制步進(jìn)電機(jī)所要求的數(shù)字信號。開環(huán)控制中,即使負(fù)載很輕,步進(jìn)電機(jī)也很少以大于10000步/秒的速度工作,因此,只要求微處理機(jī)每0.1毫秒發(fā)一次步進(jìn)命令。而每次發(fā)送步進(jìn)命令所需要的程序執(zhí)行時(shí)間比0.1毫秒小很多,所以,微處理機(jī)完全有多余能力執(zhí)行別的任務(wù)。使用中斷子程序控制電機(jī)能使處理能力得到充分利用。
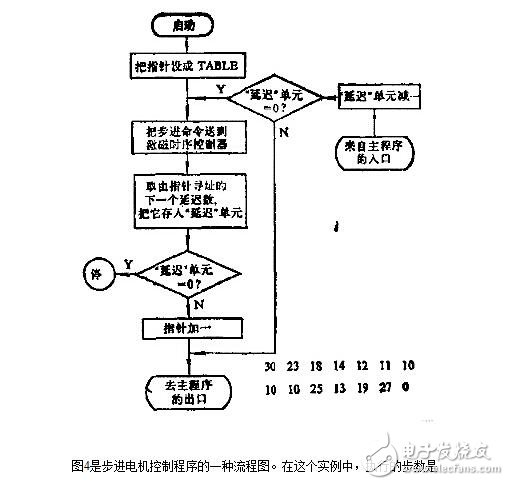
固定的,步進(jìn)命令之間的時(shí)間受從“TABLE”單元開始的查閱表里存儲(chǔ)數(shù)值的控制。程序以設(shè)寄存器“指針”等于“TABLE”開始,因此,“指針”里裝有查閱表中第一個(gè)值的地址。然后,把第一次步進(jìn)命令發(fā)給激磁時(shí)序控制器,用它改變電機(jī)里的相激磁。
在發(fā)下一次步進(jìn)命令之前必須進(jìn)行延時(shí),使電機(jī)有時(shí)間執(zhí)行第一步。這時(shí), 取出由指針尋址的延時(shí)數(shù)(第一次為查閱表里的第一個(gè)值)并把它存入“延遲”單元里。然后,檢查這個(gè)單元的內(nèi)容是不是零。如果是零,表示已經(jīng)走到了這個(gè)表的末尾;不是零則“指針”加一,指向表內(nèi)的下一個(gè)數(shù)。最后,控制程序返回主程序。
主程序繼續(xù)執(zhí)行直到發(fā)生下次時(shí)鐘中斷,它使處理機(jī)返回到電機(jī)控制子程序的“入口”。‘延遲”單元里的數(shù)減一并且與零比較。如果不為零,則控制立即返回主程序;如果“延遲”單元已達(dá)到零,則把下一步命令送到激磁時(shí)序控制器,并且往“延遲”單元裝入查閱表里的下一個(gè)位。因此,步進(jìn)命令之間的時(shí)間與恒定的時(shí)鐘周期及查閱表中的數(shù)值成正比。例如:第一步命令發(fā)出之后,“延遲”單元裝入“30”,于是,“延遲”單元減到零之前將產(chǎn)生30次時(shí)鐘中斷。
查閱表中的數(shù)值是考慮以6步上升到最高步進(jìn)頻率設(shè)置的,這個(gè)最高頻率是鐘頻的l/l0。減速從長延時(shí)數(shù)值(25)開始,這個(gè)時(shí)間對應(yīng)轉(zhuǎn)子轉(zhuǎn)過平衡位置而進(jìn)入產(chǎn)生減速所需要的負(fù)轉(zhuǎn)矩的位置。因?yàn)樨?fù)載轉(zhuǎn)矩產(chǎn)生的是負(fù)轉(zhuǎn)矩,所以,使電機(jī)減速只需要4步。最后,系統(tǒng)逐漸靜止,距離初始位置共14步。這時(shí),程序檢
測到“延遲”單元內(nèi)容為零
并轉(zhuǎn)到“停止”。 考慮14步運(yùn)動(dòng)的”延遲”值取樣表
該例中,走過的距離是
固定的。不過,行程開始之前,程序可裝入不同的目標(biāo)位置。通過擴(kuò)展查閱表和修改有關(guān)程序,能使步數(shù)增加。如果目標(biāo)離初始位置少于14步,這時(shí),可以刪去查閱表里適當(dāng)?shù)奈唬诡l率降低,步數(shù)減少。
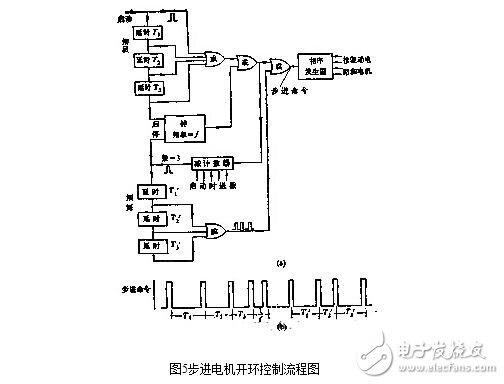
(2)以硬件定時(shí) 如果加速系統(tǒng)需要執(zhí)行的步數(shù)比較少,那么,相激磁定時(shí)可以用數(shù)字集成電路產(chǎn)生。例如,在圖5 (a)小,精確的前三步定時(shí)由持
續(xù)時(shí)間可變的延時(shí)時(shí)序電路產(chǎn)生,用它把電機(jī)加速到由系統(tǒng)鐘頻確定的步進(jìn)頻率。當(dāng)接近目標(biāo)位值時(shí),利用后面的延時(shí)時(shí)序電路使電機(jī)減速。
系統(tǒng)最初靜止,啟動(dòng)脈沖加到 “啟動(dòng)”輸入端后,經(jīng)過一系列邏輯“或”門作用到相序發(fā)生器上,相序發(fā)處器發(fā)生的激磁變化啟動(dòng)電機(jī)加速。啟動(dòng)脈沖同時(shí)觸發(fā)第一級延時(shí)電路,把這個(gè)脈沖延遲T1時(shí)間,在這期間,電機(jī)運(yùn)動(dòng)到第—次相轉(zhuǎn)換位置。經(jīng)過T1延時(shí)后,第一級的脈沖輸出送到相序發(fā)生器并觸發(fā)下級延時(shí)電路。這種時(shí)序一直繼續(xù)到所有延時(shí)電路都工作完。最末一級延時(shí)的輸出用來啟動(dòng)恒頻時(shí)鐘,以恒頻時(shí)鐘生以后的步進(jìn)命令,定時(shí)波形如圖5(b)所示。
因?yàn)槭孪劝涯繕?biāo)位置送入了減法計(jì)數(shù)器。以后每執(zhí)行一次,計(jì)數(shù)器就減一。因此,這個(gè)計(jì)數(shù)器記錄著到達(dá)目標(biāo)位置之前需要發(fā)出的步進(jìn)命令數(shù)。當(dāng)還需要執(zhí)行的步數(shù)等于減速延時(shí)電路數(shù)時(shí),減法計(jì)數(shù)器產(chǎn)生一個(gè)脈沖, 關(guān)斷時(shí)鐘并觸發(fā)第一級減速電路延時(shí)T1,。到達(dá)目標(biāo)位置之前的最后幾步的減速控制由三級持續(xù)時(shí)間可變的延時(shí)T1,、T2,、T3,產(chǎn)生,它們順序觸發(fā),產(chǎn)生送到相序發(fā)生器的步進(jìn)命令。減速以長激磁周期(T1,)開始,讓轉(zhuǎn)子轉(zhuǎn)過平衡位置和產(chǎn)生負(fù)轉(zhuǎn)矩。 如果系統(tǒng)的最大工作速度接近失步頻率,那末,也許需要20到50級
延時(shí),這時(shí)成本很高。通常,硬件定時(shí)僅用在工作速度比正常的啟停頻率高得不太多的場合。在這些應(yīng)用中,延時(shí)時(shí)間能夠用靜轉(zhuǎn)矩/轉(zhuǎn)子位置特性曲線成功地預(yù)測。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論