精度只是細(xì)分技術(shù)的一個(gè)附帶功能。比如對于步進(jìn)角為1.8° 的兩相混合式步進(jìn)電機(jī),如果細(xì)分驅(qū)動(dòng)器的細(xì)分?jǐn)?shù)設(shè)置為4,那么電機(jī)的運(yùn)轉(zhuǎn)分辨率為每個(gè)脈沖0.45°,電機(jī)的精度能否達(dá)到或接近0.45°,還取決于
2011-08-04 16:52:17
),其主要目的是減弱或消除步進(jìn)電機(jī)的低頻振動(dòng),提高電機(jī)的運(yùn)轉(zhuǎn)精度只是細(xì)分技術(shù)的一個(gè)附帶功能。比如對于步進(jìn)角為1.8° 的兩相混合式步進(jìn)電機(jī),如果細(xì)分驅(qū)動(dòng)器的細(xì)分?jǐn)?shù)設(shè)置為4,那么電機(jī)的運(yùn)轉(zhuǎn)分辨率為每個(gè)
2014-01-21 14:55:59
1.步進(jìn)電機(jī)驅(qū)動(dòng)器電壓的確定
混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的供電電源電壓一般是一個(gè)較寬的范圍(比如IM483的供電電壓為12~48VDC),電源電壓通常根據(jù)電機(jī)的工作轉(zhuǎn)速和響應(yīng)要求來選擇。如果電機(jī)工作轉(zhuǎn)速
2023-11-09 07:50:11
步進(jìn)電機(jī)驅(qū)動(dòng)器電壓是多少?首先來確定步進(jìn)電機(jī)驅(qū)動(dòng)器電壓,混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的供電電源電壓一般是一個(gè)較寬的范圍。如果電機(jī)工作轉(zhuǎn)速較高或響應(yīng)要求較快,那么電壓取值也高,但注意電源電壓的紋波不能超過
2021-07-08 08:54:55
步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)基于PIC16C621A 和A3955的步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)The Design of Steping Motor Driver Based on PIC16
2008-07-21 14:28:42
。14.如果用簡單的方法調(diào)整兩相步進(jìn)電機(jī)通電后的轉(zhuǎn)動(dòng)方向?只需將電機(jī)與驅(qū)動(dòng)器接線的A+和A-(或者B+和B-)對調(diào)即可。15.關(guān)于驅(qū)動(dòng)器的細(xì)分原理及一些相關(guān)說明在國外,對于步進(jìn)系統(tǒng),主要采用二相混合式步進(jìn)
2012-07-14 21:13:39
今天調(diào)試了一個(gè)步進(jìn)電機(jī),原來調(diào)試過一款歐柯達(dá)的42步進(jìn)電機(jī), 本以為兩個(gè)電機(jī)差不多,驅(qū)動(dòng)器給的一樣,結(jié)果發(fā)現(xiàn)死活不能用自己百度了一下,做一個(gè)筆記例如這個(gè)電機(jī) 42BYGH403AA 42 為機(jī)座尺寸
2021-07-07 06:05:42
剝線機(jī)概述 SYD2404是整/半步型驅(qū)動(dòng)器,驅(qū)動(dòng)電壓DC12-40V,采用單電源供電。適配6或8出線電流在4.0A以下,外徑42-86mm的各種型號的二相混合式步進(jìn)電機(jī)。該驅(qū)動(dòng)器內(nèi)部采用雙極恒流斬波
2008-11-07 16:10:51
混合式步進(jìn)電機(jī)的驅(qū)動(dòng)原理是什么?混合式步進(jìn)電機(jī)的結(jié)構(gòu)是由哪些部分組成的?混合式步進(jìn)電機(jī)如何去實(shí)現(xiàn)輸出控制呢?
2021-12-21 06:29:50
混合式步進(jìn)電機(jī)的結(jié)構(gòu)和驅(qū)動(dòng)原理是什么?如何產(chǎn)生Spwm?
2021-12-21 07:20:31
μs。4)3個(gè)16位通用定時(shí)器,每個(gè)定時(shí)器有多達(dá)4個(gè)通道,用于輸入捕獲/輸出比較/PWM或脈沖輸出;1個(gè)16位帶死區(qū)控制盒緊急剎車,用于電機(jī)控制的PWM高級控制定時(shí)器。 2 細(xì)分驅(qū)動(dòng)原理 一般兩相步進(jìn)
2018-02-24 14:01:14
單片機(jī)步進(jìn)電機(jī)控制器是什么?怎樣去制作一種單片機(jī)電動(dòng)機(jī)控制器?D306型號三相伺服混合式步進(jìn)電機(jī)驅(qū)動(dòng)器具有哪些特點(diǎn)?怎樣去使用D306三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器?
2021-07-13 08:09:56
■ 背景簡介作為為了實(shí)驗(yàn)室機(jī)器臂驅(qū)動(dòng)電機(jī)待選型號之一,需要對于這款大功率 混合式步進(jìn)電機(jī) 進(jìn)行測試。獲得他的基本參數(shù)和使用方法。SUMTOR 三拓電氣 的主頁給出了相關(guān)產(chǎn)品的主要連接。▲ 實(shí)驗(yàn)所對應(yīng)
2021-06-28 07:51:51
Driver驅(qū)動(dòng)高精度系列二相混合式步進(jìn)電機(jī)多細(xì)分驅(qū)動(dòng)器1、使用說明:1、VCC&GND:20~40V DC; 2、A+A- B+B-:接二相混合式步進(jìn)電機(jī)的2相; 3、工作額定電流:3A;...
2021-07-08 07:29:05
,得認(rèn)清女人的類別,挑一類自己好口的進(jìn)行針對性的進(jìn)攻這樣方可告捷啊。于是就百度啊google啊,得到以下結(jié)論:步進(jìn)電機(jī)分三種:永磁式(PM)、反應(yīng)式(VR)和混合式(HB)。永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩
2019-07-27 04:30:00
以兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器為例來設(shè)計(jì)H橋驅(qū)動(dòng)電路。電路原理圖1給出了H橋驅(qū)動(dòng)電路與步進(jìn)電機(jī)AB相繞組連接的電路框圖。4個(gè)開關(guān)K1和K4,K2和K3分別受控制信號a,b的控制,當(dāng)控制信號使開關(guān)K1,K4
2020-08-25 14:11:27
新手求助,基于PIC的兩相混合式步進(jìn)電機(jī)閉環(huán)細(xì)分驅(qū)動(dòng)器設(shè)計(jì)!求大神指導(dǎo)!
2013-04-11 13:22:48
兩相混合式步進(jìn)電機(jī)H橋驅(qū)動(dòng)電路設(shè)計(jì)原理
2021-02-19 06:00:06
兩相混合式步進(jìn)電機(jī)及其驅(qū)動(dòng)技術(shù)
2013-04-11 13:54:40
兩相混合式步進(jìn)電機(jī)細(xì)分用32輸出可調(diào)的PWM波形 不用DA可以實(shí)現(xiàn)細(xì)分嗎
2015-08-20 13:45:39
1. 仿真圖2. 驅(qū)動(dòng)電路原理解析2.1 兩相四線混合式步進(jìn)電機(jī)驅(qū)動(dòng)原理首先給出兩相四線混合式步進(jìn)電機(jī)的整步驅(qū)動(dòng)順序圖。可以看出,兩相驅(qū)動(dòng)電壓的相位差為90°,因此,第一節(jié)中驅(qū)動(dòng)電路的兩個(gè)脈沖電壓源
2021-07-08 07:24:12
如何控制步進(jìn)電機(jī)的方向?步進(jìn)電機(jī)振動(dòng)大,噪聲也很大,什么原因?為什么步進(jìn)電機(jī)通電后,電機(jī)不運(yùn)行?步進(jìn)電機(jī)抖動(dòng),不能連續(xù)運(yùn)行,怎么辦?混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的脫機(jī)信號FREE一般在什么情況
2021-10-27 07:52:49
誰有PL2303的驅(qū)動(dòng)適合win8的 謝謝啦 還有我用L298驅(qū)動(dòng)二相混合式步進(jìn)電機(jī)怎動(dòng)不了求一個(gè)不帶按鍵的C程序 謝謝大神
2015-12-31 12:08:24
二相混合式步進(jìn)電機(jī)simulink仿真模型怎么搭建?
2021-10-28 07:53:18
://blog.csdn.net/qq_39023633/article/details/106653559二相混合式步進(jìn)電機(jī)simulink仿真簡單的驅(qū)動(dòng)器建模(含模型文件)https://blog.csdn.net/qq_39023633/article/details/106652195
2020-06-14 22:33:19
細(xì)分原理二相混合式步進(jìn)電機(jī)電磁轉(zhuǎn)矩方程p-轉(zhuǎn)子級數(shù);Zr-轉(zhuǎn)子齒數(shù)Zr=2*p;Ta-a相電磁轉(zhuǎn)矩;Tb-b相電磁轉(zhuǎn)矩;Td-定位矩(關(guān)于二相混合式步進(jìn)電機(jī)的數(shù)學(xué)模型可參見我的另一篇博客https
2021-07-08 09:59:07
/details/106653559二相混合式步進(jìn)電機(jī)simulink仿真簡單的驅(qū)動(dòng)器建模(含模型文件)https://blog.csdn.net/qq_39023633/article/details/106652195
2020-06-14 22:35:18
如題目描述,二相混合式步進(jìn)電機(jī),鎖步時(shí)電流聲音很大,驅(qū)動(dòng)器是lv8729v,細(xì)分設(shè)置為2,單片機(jī)是stc15系列的。但并不是所有鎖步的時(shí)候電流聲音都大,會間隔出現(xiàn),而且總是在某一次運(yùn)動(dòng)之后才會有。不知道是什么原因造成的,求大神指點(diǎn)。
2016-12-21 10:09:33
上圖中的Te仿真中有兩個(gè)小錯(cuò)誤,正確方程應(yīng)為:模型文件名為:model_of_Two_phase_Hybrid_stepping_motor.slx(2019b)參考文獻(xiàn):基于MATLAB/Simulink的二相混合式步進(jìn)電機(jī)的建模與仿真
2021-08-31 06:13:04
下圖為兩相四線混合式步進(jìn)電機(jī)用雙H橋驅(qū)動(dòng)電路。圖中Ra、La、Rb、Lb分別為兩相四線混合式步進(jìn)電機(jī)的兩相電阻及電感參數(shù)。
2021-07-07 07:15:42
1.控制精度不同兩相步進(jìn)電機(jī)步距角為1.8度:200個(gè)脈沖/轉(zhuǎn)。交流伺服電機(jī)的控制精度由電動(dòng)機(jī)后端的編碼器保證。對于帶17位編碼器的電動(dòng)機(jī)而言,驅(qū)動(dòng)器每接收217 = 131072個(gè)脈沖電動(dòng)機(jī)轉(zhuǎn)一圈
2021-06-28 09:56:07
本設(shè)計(jì)介紹的是THB8128大功率、高細(xì)分兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì),見附件下載其原理圖和測試代碼等。該THB8128步進(jìn)電機(jī)驅(qū)動(dòng)器支持雙全橋MOSFET驅(qū)動(dòng),低導(dǎo)通電阻Ron=0.4Ω(上橋
2019-11-12 07:00:00
一、硬件方面本次步進(jìn)電機(jī)使用的是混合式二相步進(jìn)電機(jī)電機(jī)與驅(qū)動(dòng)的連接二相步距角為1.8°,對于硬件連接(電機(jī)驅(qū)動(dòng)和stm32單片機(jī))方面有共陰共陽兩種方式本次采用共陽的連接方式,如圖中驅(qū)動(dòng)器的控制信號
2021-08-31 09:21:03
分析了電腦繡花機(jī)系統(tǒng)中,現(xiàn)有的五相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器存在低頻轉(zhuǎn)矩振蕩、高頻輸出轉(zhuǎn)矩不足和多電源供電及不通用等諸多不足之處的基礎(chǔ)上,設(shè)計(jì)出一種基于單片機(jī)的通用型五相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器.該驅(qū)動(dòng)器
2011-03-07 12:15:26
如何使用uln2003驅(qū)動(dòng)39BYG混合式1.8°步進(jìn)角的步進(jìn)電機(jī)?
2021-10-28 07:24:24
。4)3個(gè)16位通用定時(shí)器,每個(gè)定時(shí)器有多達(dá)4個(gè)通道,用于輸入捕獲/輸出比較/PWM或脈沖輸出;1個(gè)16位帶死區(qū)控制盒緊急剎車,用于電機(jī)控制的PWM高級控制定時(shí)器。2 細(xì)分驅(qū)動(dòng)原理一般兩相步進(jìn)電機(jī)驅(qū)動(dòng)
2019-06-24 08:00:00
時(shí)的振動(dòng)和噪聲?四相混合式步進(jìn)電機(jī)與驅(qū)動(dòng)器的串聯(lián)接法和并聯(lián)接法有什么區(qū)別?混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的脫機(jī)信號FREE一般在什么情況下使用?
2021-10-13 09:04:55
三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器B3C的工作原理根據(jù)正弦電流細(xì)分驅(qū)動(dòng)的原理,設(shè)計(jì)出三相混合式細(xì)分型步進(jìn)電機(jī)驅(qū)動(dòng)器,系統(tǒng)采用電流跟蹤和脈寬調(diào)制技術(shù),使電機(jī)的相電流為相位相
2008-12-19 01:36:33 136
136 本文介紹了森創(chuàng)-兩相混合式步進(jìn)電機(jī)的組成部分及優(yōu)點(diǎn)。
2009-04-02 13:59:38100 本文針對電流控制的兩相混合式步進(jìn)電機(jī)給出了一種驅(qū)動(dòng)方案。
2009-04-02 15:24:0740 兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)芯片BY-5064使用說明:BY-5064是一款小型化、高細(xì)分、多功能、使用方便的兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)芯片,配合簡單的外圍電路即可實(shí)現(xiàn)高性能的驅(qū)動(dòng)電路。該
2009-09-29 10:41:5163 THB6128 高細(xì)分兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)芯片:一、特性:●雙全橋MOSFET驅(qū)動(dòng),低導(dǎo)通電阻Ron=0.55Ω●最高耐壓36VDC,大電流2.2A(峰值)●多種細(xì)分可選(1、1/2、1/4、1/8、1/1
2009-10-27 18:29:42259 DY3A/DY3B 混合式步進(jìn)電機(jī)使用手冊
2010-01-09 10:19:1820 MOTEC 步進(jìn)電機(jī)及驅(qū)動(dòng)器:德國MOTEC公司多年以來一直致力于步進(jìn)電機(jī)及驅(qū)動(dòng)器的研究、開發(fā)、生產(chǎn)工作,是世界上步進(jìn)驅(qū)動(dòng)系統(tǒng)行業(yè)的領(lǐng)先者。該公司生產(chǎn)的兩項(xiàng)混合式步進(jìn)電機(jī)正弦
2010-01-09 10:21:5955 三相混合式細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器具有動(dòng)態(tài)性能好、運(yùn)行平穩(wěn)、噪音小、輸出力矩大等明顯優(yōu)點(diǎn),體現(xiàn)了步進(jìn)電機(jī)驅(qū)動(dòng)的發(fā)展趨勢。BY—30H 驅(qū)動(dòng)器具有如下優(yōu)點(diǎn):1、采用交流伺服
2010-01-09 13:58:20139 MC-2060X 系列二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器采用最新專利技術(shù),兼具本公司以往產(chǎn)品步距角靈活可選(即單一驅(qū)動(dòng)器配二相步進(jìn)電機(jī)即可覆蓋二相,三相,五相典型步距角)的特色。驅(qū)
2010-01-13 08:50:5323 二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì):從 改善步進(jìn)電機(jī)動(dòng)靜態(tài)性能的角度出發(fā),給出了基于8051的二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì)方案,主要介紹了系統(tǒng)結(jié)構(gòu)、通訊策略、
2010-01-14 09:44:21100 SH-20403兩相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)器
驅(qū)動(dòng)器內(nèi)部的開關(guān)電源設(shè)計(jì)保證了可以適應(yīng)較寬的電壓范圍,用戶可根據(jù)各自的情況在10V到40V DC之間選擇。
2010-05-11 11:59:29138 作為混合式步進(jìn)電機(jī)的驅(qū)動(dòng)器,基于L297/298驅(qū)動(dòng)芯片的組合是較為常見的一種。本文較為詳細(xì)得論述了基于該種驅(qū)動(dòng)器下混合式步進(jìn)電機(jī)的三種工作模式,給出了相應(yīng)的單片機(jī)接口方
2010-08-02 16:24:0842 摘要:作為混合式步進(jìn)電機(jī)的驅(qū)動(dòng)器, 基于L297/298 驅(qū)動(dòng)芯片的組合是較為常見的一種。本文較為詳細(xì)得論述了基于該種驅(qū)動(dòng)器下混合式步進(jìn)電機(jī)的三種工作模式, 給出了相應(yīng)的單片機(jī)接
2010-08-18 14:44:21140 文章詳細(xì)介紹了一種以Xilinx 公司生產(chǎn)的CPLD 器件XC9536 為核心來產(chǎn)生電機(jī)繞組參考電流, 進(jìn)而實(shí)現(xiàn)具有繞組電流補(bǔ)償功能的兩相混合式步進(jìn)電動(dòng)機(jī)10 細(xì)分和50 細(xì)分運(yùn)行方式的方法。
2010-10-27 15:31:5754 2005年12月28日,北京訊 凌陽科技(sunplus)于近日宣布,推出基于16位單片機(jī)SPMC75的混合式步進(jìn)電機(jī)驅(qū)動(dòng)器方案。
2006-03-13 13:01:49 495
495
混合式壓電轉(zhuǎn)換器驅(qū)動(dòng)電路
2009-02-18 22:38:28682 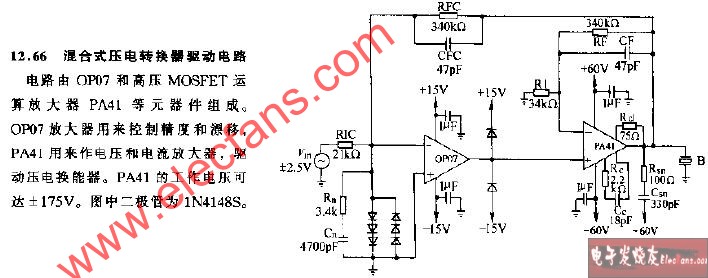
五相混合式步進(jìn)電動(dòng)機(jī)走步均勻性分析
文章對五相混合式步進(jìn)電動(dòng)機(jī)采用下橋臂電流恒定不變式恒流斬波驅(qū)動(dòng)時(shí)的步進(jìn)均勻性進(jìn)行了詳細(xì)分析,針
2009-10-16 08:32:201062 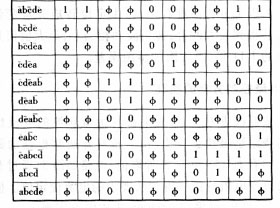
三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器
本文根據(jù)正弦電流細(xì)分驅(qū)動(dòng)的原理,設(shè)計(jì)出三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器。系統(tǒng)采用電流跟跟蹤和脈寬調(diào)制技術(shù),使用電機(jī)的相
2010-02-22 10:58:092133 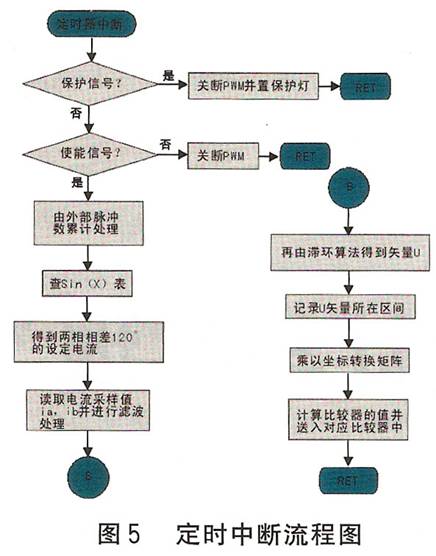
在分析了步進(jìn)電機(jī)的驅(qū)動(dòng)特性和斬波恒流細(xì)分驅(qū)動(dòng)原理和混合式步進(jìn)電機(jī)驅(qū)動(dòng)芯片L297/298的性能、結(jié)構(gòu)的基礎(chǔ)上,結(jié)合8751單片機(jī),設(shè)計(jì)出了混合式步進(jìn)電機(jī)驅(qū)動(dòng)器.實(shí)測表明,此細(xì)分
2011-09-27 16:25:0674 三相混合式步進(jìn)電機(jī)比二相步進(jìn)電機(jī)有更好的低速平穩(wěn)性及輸出力矩,所以三相混合式步進(jìn)電機(jī)比二相步進(jìn)電機(jī)有更好應(yīng)用前景。
2012-02-29 10:50:402834 
根據(jù)兩相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)原理,設(shè)計(jì)了一種基于STM32F103RB單片機(jī)的、細(xì)分度可調(diào)的步進(jìn)電機(jī)驅(qū)動(dòng)器。控制器采用電流矢量控制算法,通過雙H橋驅(qū)動(dòng)步進(jìn)電機(jī)的兩相轉(zhuǎn)子。利用片
2012-06-13 14:29:36239 基于DSP的三相混合式步進(jìn)電機(jī)的SVPWM控制。
2016-04-18 09:47:4914 多細(xì)分二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的研制,下來看看
2016-04-25 10:40:3618 多細(xì)分三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器研究及實(shí)現(xiàn)
2016-04-25 10:40:3645 二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì),下來看看
2016-04-25 10:40:3622 混合式步進(jìn)驅(qū)動(dòng)單元的研究,有需要 的下來看看
2016-04-25 10:40:3616 基于DSP的兩相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)設(shè)計(jì)
2016-04-25 10:54:0917 本文研究了一種應(yīng)用于經(jīng)濟(jì)型數(shù)控系統(tǒng)的混合式步進(jìn)電機(jī)驅(qū)動(dòng)裝置的設(shè)計(jì)技術(shù)。 文中詳述了該驅(qū)動(dòng)裝置的構(gòu)成原理,并結(jié)合在經(jīng)濟(jì)型數(shù)控系統(tǒng)的應(yīng)用講述其應(yīng)用技巧。
2016-05-11 15:26:212 我們了解了步進(jìn)驅(qū)動(dòng)器的原理以及接線圖,但卻還不知道如何實(shí)操,接下來就以ZHH-MC兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器為例,說說步進(jìn)電機(jī)驅(qū)動(dòng)器的使用說明書。
2017-08-15 09:22:0838440 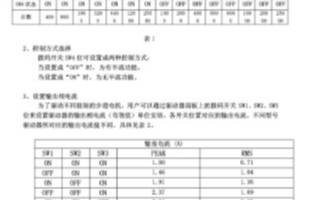
步進(jìn)電機(jī)驅(qū)動(dòng)器的電壓和電流應(yīng)該如何確定呢?如何配用步進(jìn)電機(jī)驅(qū)動(dòng)器?專業(yè)銷售鳴志步進(jìn)電機(jī)驅(qū)動(dòng)器的工程師認(rèn)為針對電壓和電流建議兩種方案來確定步進(jìn)電機(jī)驅(qū)動(dòng)器配用。 1.步進(jìn)電機(jī)驅(qū)動(dòng)器電壓的確定 混合式步進(jìn)
2017-11-03 14:26:0621 一、型號說明 混合式步進(jìn)電機(jī)采用稀土永磁 材料制造 與反應(yīng)式步進(jìn)電機(jī)相比具有電磁損耗小 轉(zhuǎn)換效率高 動(dòng)態(tài)特性好等優(yōu)點(diǎn) 混合步進(jìn)電機(jī)的電磁靜力矩為電機(jī)阻尼 ,取消了反應(yīng)式電機(jī)的機(jī)械阻尼盤 無需人工調(diào)整 運(yùn)行平穩(wěn) 噪音小不易失步 混合式步進(jìn)電機(jī)取代反應(yīng)式電機(jī)是經(jīng)濟(jì)型數(shù)控系統(tǒng)的發(fā)展趨勢。
2017-11-13 12:46:4116 基于提高兩相混合式步進(jìn)電機(jī)的穩(wěn)態(tài)性能和動(dòng)態(tài)特性的目的,本文結(jié)合轉(zhuǎn)矩矢量控制策略,提出基于DSP的步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)方案。通過采用最大電流/轉(zhuǎn)矩的轉(zhuǎn)子磁場定向失量控制,完成對兩相混合式步進(jìn)電機(jī)的控制
2017-12-07 10:07:498 混合式(即HB型)步進(jìn)電機(jī)有兩相、三相、五相式,轉(zhuǎn)子因與相數(shù)無關(guān),而采用相同轉(zhuǎn)子,本文以兩相HB型混合式步進(jìn)電機(jī)為例加以說明。HB型的名稱由其轉(zhuǎn)子結(jié)構(gòu)得來,其轉(zhuǎn)子是PM型永磁步進(jìn)電機(jī)與VR型變磁阻
2018-04-25 10:04:0519114 混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點(diǎn),分為兩相和五相,兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為 0.72度,這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。本文主要解析HB型混合式步進(jìn)電機(jī)與相數(shù)、轉(zhuǎn)子齒數(shù)、主極數(shù)的關(guān)系,首先介紹的是步進(jìn)電機(jī)相數(shù)、轉(zhuǎn)子齒數(shù)和主極數(shù)的表達(dá)式,其次介紹了相內(nèi)及相間磁路的一般形式。
2018-04-25 10:23:1615161 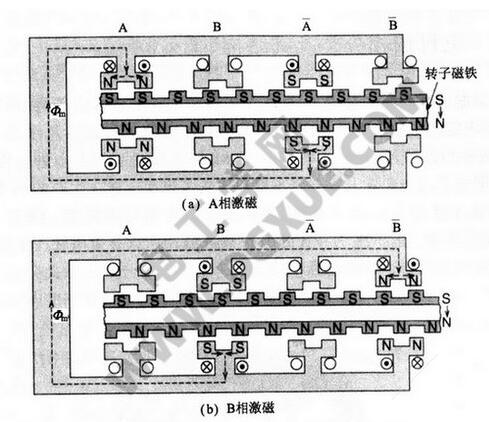
轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步進(jìn)角)。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的。那么什么是混合式步進(jìn)電機(jī),混合式步進(jìn)電機(jī)和反應(yīng)式步進(jìn)電機(jī)有什么區(qū)別嗎?接下來跟隨小編詳細(xì)的來了解一下混合式步進(jìn)電機(jī)。
2018-04-25 10:59:1115747 闡述了兩相混合式步進(jìn)電機(jī)的細(xì)分控制原理 , 提出了以 MSP430 單片機(jī)為微控制器 , 通過 DAC7612 產(chǎn)生相差為 π/2的細(xì)分電流控制信號 , 以集成步進(jìn)電機(jī)驅(qū)動(dòng)芯片為驅(qū)動(dòng)器 , 實(shí)現(xiàn)了兩相混合式步進(jìn)電機(jī)的細(xì)分運(yùn)行控制 , 電流細(xì)分精度達(dá)到 1/ 2048 。
2018-05-03 15:39:1038 本設(shè)計(jì)介紹的是THB8128大功率、高細(xì)分兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)。該THB8128步進(jìn)電機(jī)驅(qū)動(dòng)器支持雙全橋MOSFET驅(qū)動(dòng),低導(dǎo)通電阻Ron=0.4Ω(上橋+下橋)。
2020-04-06 10:10:001035 次之,在運(yùn)行特性上有區(qū)別,混合式電機(jī)運(yùn)轉(zhuǎn)時(shí)相對性較穩(wěn)定,輸出力矩相對性比較大,運(yùn)轉(zhuǎn)聲音小。
2020-08-08 09:14:001429 步進(jìn)電機(jī)從其結(jié)構(gòu)形式上可分為反應(yīng)式步進(jìn)電機(jī)、永磁式步進(jìn)電機(jī)、混合式步進(jìn)電機(jī)、單相步進(jìn)電機(jī)、平面步進(jìn)電機(jī)等多種類型。
2020-12-26 08:30:353527 H橋功率驅(qū)動(dòng)電路可應(yīng)用于步進(jìn)電機(jī)、交流電機(jī)及直流電機(jī)等的驅(qū)動(dòng)。永磁步進(jìn)電機(jī)或混合式步進(jìn)電機(jī)的勵(lì)磁繞組都必須用雙極性電源供電,也就是說繞組有時(shí)需正向電流,有時(shí)需反向電流,這樣繞組電源需用H橋驅(qū)動(dòng)。本文以兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器為例來設(shè)計(jì)H橋驅(qū)動(dòng)電路。
2021-01-31 06:21:3529 此前已經(jīng)以PM型步進(jìn)電機(jī)為例介紹了步進(jìn)電機(jī)的工作。本文將介紹當(dāng)今應(yīng)用廣泛的混合式步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理。
2021-06-12 10:48:006607 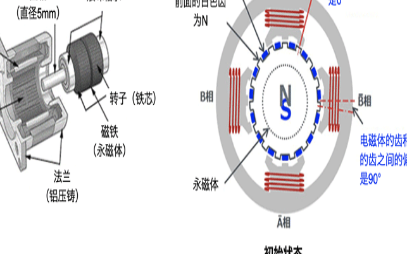
。對步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)器的研究幾乎是與步進(jìn)電動(dòng)機(jī)的研究同步進(jìn)行的 步進(jìn)電機(jī)驅(qū)動(dòng)器模塊 1、爬山復(fù)位 2、自動(dòng)控制 3、手動(dòng)微調(diào) 4、方向和限位處理 5、邏輯輸出 步進(jìn)電機(jī)驅(qū)動(dòng)器的分類 1.永磁式步進(jìn)電動(dòng)機(jī) 2.兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器 3.三相
2021-10-02 18:10:009033 此前已經(jīng)以PM型步進(jìn)電機(jī)為例介紹了步進(jìn)電機(jī)的工作。本文將介紹當(dāng)今應(yīng)用廣泛的混合式步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理。混合式步進(jìn)電機(jī)的結(jié)構(gòu),混合式步進(jìn)電機(jī)是兼具VR型和PM型電機(jī)優(yōu)點(diǎn)的步進(jìn)電機(jī)。
2023-02-24 09:51:101218 
混合式步進(jìn)電機(jī)(Hybrid Stepper Motor)是目前應(yīng)用較廣泛的一種步進(jìn)電機(jī),其工作原理是將永磁式和可變磁阻式兩種原理結(jié)合在一起。
混合式步進(jìn)電機(jī)的轉(zhuǎn)子由多個(gè)磁極組成,通常
2023-03-08 16:10:341801 混合式步進(jìn)電機(jī)是兼具VR型和PM型電機(jī)優(yōu)點(diǎn)的步進(jìn)電機(jī)。VR(Variable Reluctance)型電機(jī)使用齒輪狀的鐵芯作為轉(zhuǎn)子。其優(yōu)點(diǎn)是可以通過機(jī)械加工減小步距角,缺點(diǎn)是轉(zhuǎn)矩稍低,難以同時(shí)實(shí)現(xiàn)
2023-03-10 09:12:36545 
1. 仿真圖 2. 驅(qū)動(dòng)電路原理解析 2.1 兩相四線混合式步進(jìn)電機(jī)驅(qū)動(dòng)原理 首先給出兩相四線混合式步進(jìn)電機(jī)的整步驅(qū)動(dòng)順序圖。可以看出,兩相驅(qū)動(dòng)電壓的相位差為90°。 在驅(qū)動(dòng)電路中,一個(gè)H橋驅(qū)動(dòng)
2023-03-20 10:57:401 兩相混合式步進(jìn)電機(jī)數(shù)學(xué)模型 式中 Ls為自感,它與轉(zhuǎn)子的機(jī)械角位置 θ 有關(guān)。 由于混合式步進(jìn)電機(jī)中磁芯造成很大的氣隙, 其可變磁阻對于輸出總力矩的貢獻(xiàn)可以忽略,式 (2)作為單相繞組等效電路
2023-03-22 09:52:400 混合式四線雙極性步進(jìn)電機(jī): 步進(jìn)電機(jī)的整步、半步、細(xì)分: 整步:A-B-A'-B'各加一次脈沖完成一圈旋轉(zhuǎn)360度,但42步進(jìn)電機(jī)轉(zhuǎn)子齒數(shù)50,兩相混合式步進(jìn)電機(jī)
2023-03-22 09:26:132 目錄在位置跟蹤伺服系統(tǒng)中二相混合式步進(jìn)電機(jī)閉環(huán)矢量控制simulink仿真 閉環(huán)矢量控制系統(tǒng)simulink圖? 閉環(huán)矢量控制系統(tǒng)系統(tǒng)結(jié)構(gòu)框圖 二相混合式步進(jìn)電機(jī)的數(shù)學(xué)模型 矩角特性 電壓方程
2023-03-24 10:30:591 反應(yīng)式步進(jìn)電機(jī)與混合式步進(jìn)電機(jī)的區(qū)別如下:
1、在結(jié)構(gòu)和材料上不同,混合式電機(jī)內(nèi)部具有永久磁性材料,故混合式電機(jī)有自阻(即在電機(jī)未加電的情況下有一定的自鎖力),而反應(yīng)式電機(jī)沒有自阻。
2、在運(yùn)行性能上有差別,混合式電機(jī)運(yùn)行時(shí)相對較平穩(wěn),輸出力矩相對較大,運(yùn)行聲音小。
2023-03-27 15:42:33745 的品種也非常繁多。對于工業(yè)應(yīng)用來說,每轉(zhuǎn) 200 步的兩相混合式步進(jìn)電機(jī)最為常見。這里的 “混合” 是指它利用永磁體和帶齒鐵轉(zhuǎn)子的工作方式(例如可變磁阻電機(jī)),而 “200 步” 則指電機(jī)每步移動(dòng) 1.8°,該步數(shù)為轉(zhuǎn)子和定子上齒數(shù)的函數(shù)
2023-08-23 15:22:55715 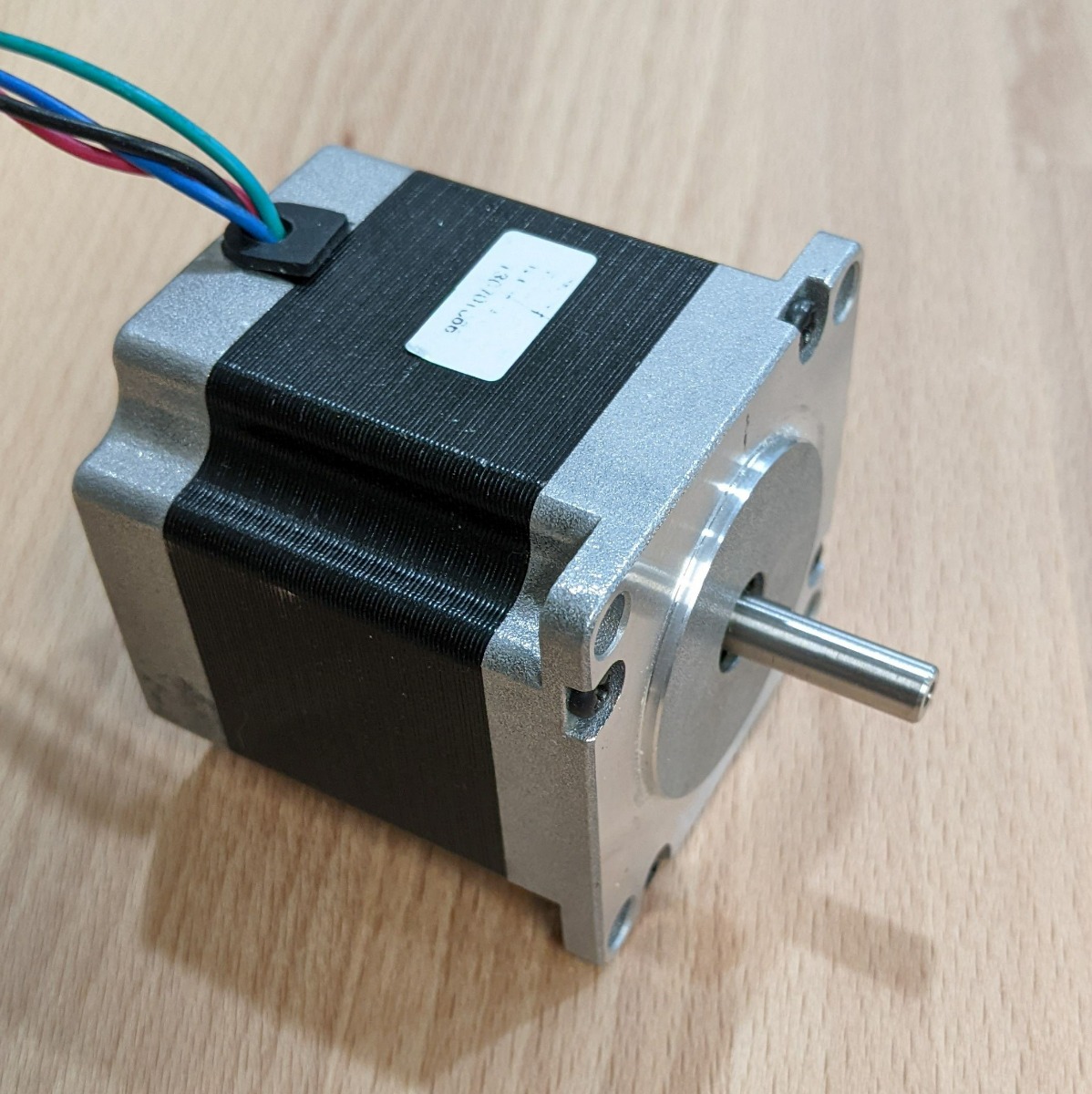
混合式步進(jìn)電機(jī)(Hybrid Stepper Motor)結(jié)合了永磁式和變極式步進(jìn)電機(jī)的特點(diǎn),以實(shí)現(xiàn)高性能和高可靠性。 合式步進(jìn)電機(jī)融合了可變磁阻(VR)型步進(jìn)電機(jī)和永磁(PM)型步進(jìn)電機(jī)的優(yōu)勢
2024-02-06 10:01:46236 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論