本文探討基于CAN總線的行車記錄儀設計和實現,詳細闡述了系統的整體結構、硬件電路設計、軟件設計流程。所開發的行車記錄儀用于在車輛行駛過程中實時采集汽車CAN總線數據信息,并將數據存儲在u盤中,以u盤為載體傳輸給PC機,可運用PC機上的軟件對數據進行分析。
2016-01-07 10:16:57 5086
5086 LIN總線是針對汽車分布式電子系統而定義的一種低成本的串行通訊網絡,是對控制器區域網絡(CAN)等其它汽車多路網絡的一種補充,適用于對網絡的帶寬、性能或容錯功能沒有過高要求的應用。LIN總線是基于SCI(UART)數據格式,采用單主控制器/多從設備的模式,是UART中的一種特殊情況。
2018-01-25 22:07:2132708 
CAN總線上傳輸的信息稱為報文,當總線空閑時任何連接的單元都可以開始發送新的報文。
2022-09-26 14:15:5212197 假期更新了一文搞懂CAN總線協議幀格式,CAN FD總線協議怎能錯過?本篇博文將講解CAN FD總線協議幀格式。
2022-10-14 12:49:532679 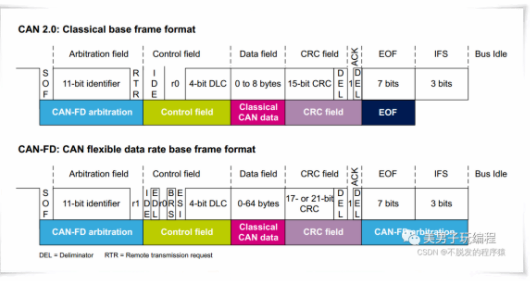
I2S(Inter-IC Sound)總線,又稱集成電路內置音頻總線,是飛利浦公司為數字音頻設備之間的音頻數據傳輸而制定的一種總線標準。采用了獨立的導線傳輸時鐘與數據信號的設計,通過將數據和時鐘信號分離,避免了因時差誘發的失真。
2022-12-09 14:03:313260 傳輸大數據塊,一幀CAN消息最多傳輸8字節用戶數據,采用短數據包也可以使得系統獲得更好的穩定性。CAN總線具有總線仲裁機制,可以組建多主系統。
2023-01-13 09:25:10768 我們知道,CAN總線上的每個節點往總線上發送數據的同時,會讀取總線上的數據,并與自己發送的數據作對比。
2023-06-07 09:32:131274 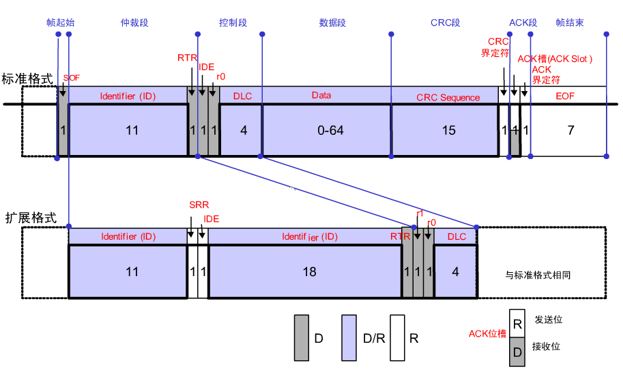
在之前的文章中小編介紹了什么是CAN總線,包括CAN總線的數據格式和通信特點等方面的內容,今天將分享串口通信相關知識內容。CAN總線、串口通信都屬于比較常見的有線傳輸方式。
2023-06-16 13:53:41720 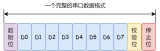
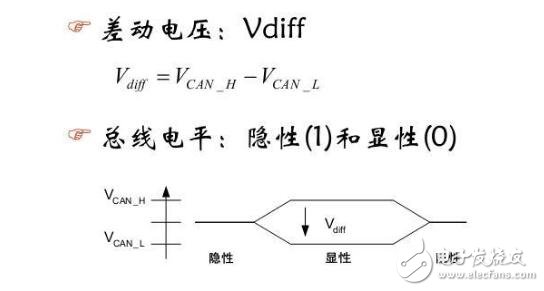
這意味著變送器通過CAN收發器改變總線電平,并將其信息傳輸到CAN總線。接收器通過監測總線電平將總線上的信息讀取到自己的CAN收發器中。
2024-02-19 14:53:54606 
點間的傳輸過程,主要是連接介質、線路電氣特性、數據的編碼/解碼、位定時和同步的實施標準。總線競爭的原則 BOSCH CAN基本上沒有對物理層進行定義,但基于CAN的ISO標準對物理層進行了定義
2014-04-27 15:16:02
在開發人員進行CAN總線相關裝置進行調試測試時,通常會采用CAN卡連接CAN網絡和PC電腦進行數據的采集、觀察和記錄。目前國內外有一些列配套的在線分析工具和軟件,但是價格昂貴。但長期以來,人們對采集
2020-01-05 11:22:13
數據幀,并正確的分析出了結果。總結,針對CAN總線協議的分析測試,發現了如下幾方面:1、OSC482L對于CAN總線數據獲取方式比較靈活,支持單線和雙線差分方式,這一點非常好,很靈活;2、通過單次觸發
2020-08-19 09:27:19
在了解 CAN 總線協議以前,需要介紹有關協議中的基本概念。1.報文(Messages)在 CAN 總線傳輸的數據具有固定的格式和有限的長度,稱為報文。2.發送器(Transmitter)和接收器
2018-12-14 14:37:44
上各節點間的傳輸過程,主要是連接介質、線路電氣特性、數據的編碼/解碼、位定時和同步的實施標準。總線競爭的原則 BOSCH CAN基本上沒有對物理層進行定義,但基于CAN的ISO標準對物理層進行了定義
2014-04-18 16:36:30
主方式的串行通訊總線,基本設計規范要求有高的位速率,高抗電磁干擾性,而且能夠檢測出產生的任何錯誤。當信號傳輸距離達到10Km時,CAN 仍可提供高達50Kbit/s的數據傳輸速率。 由于CAN總線具有
2017-10-19 11:12:46
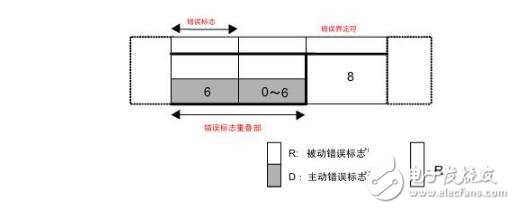
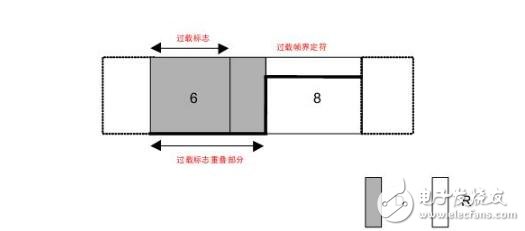
其尚未做好接收準備的幀。由于存在多個節點同時過載且過載幀發送有時間差的問題,可能出現過載標志疊加后超過6個位的現象。五、CAN總線延時分析:1. CAN總線的數據傳輸總會有一定的延時,例如:隔離器
2021-05-13 06:00:00
使用的CAN2517FD有所區別,僅供參考),主要體現在數據鏈路層這一部分。應用程序,具體表現在控制器以不同的通信方式、MCP2517FD提供的相應指令集和指令集格式對CAN2517FD的寄存器進行讀寫操作,進而實現相應的功能。具體可參考:CAN總線數據鏈路層分析(四) 二、CAN
2021-08-19 06:47:56
監聽總線上傳輸的數據。也就是說總線上的傳輸不是點到點的,而是一點對多點的傳輸,這里多點的意思是總線上所有的節點。但是總線上的節點如何知道那些數據是傳送給自己的呢?CAN總線的硬件芯片提供了一種叫做本地
2018-09-21 20:32:41
屬于現場總線的范疇,它是一種有效支持分布式控制或實時控制的串行通信網絡。在這個網絡中的各種硬件設備之間不可避免的需要實現數據傳輸,以實現產品的功用。適應技術具體要求,CAN總線透明傳輸通訊模塊誕生
2011-09-24 11:57:56
的NI PXI 儀器及CAN 接口模塊,滿足試驗工況對CAN 總線報文信息解析的功能需求,同時實現對報文數據與NI PXI 儀器其它測量參數同步采樣,試驗數據比對分析處理具有實時性和真實性。
2019-04-08 09:42:13
0.CAN總線錯誤分析與解決–講的最精辟的放在最前面我們知道CAN總線上的每個節點往總線上發送數據的同時會同時讀取總線上的數據,并與自己發送的數據作對比。—CAN仲裁???CAN總線錯誤分別有發送
2022-01-14 06:55:10
在圖1中,可讀取wav格式的文件,亦可播放,在后續的求均值中便會出錯,是否因為數據格式不對?或者是wav格式的文件用不用先用MATLAB轉成txt的數據然后再求,如果是那樣的話還能播放出wav嗎?圖
2017-03-10 10:19:06
向大神求助,想問一下單片機和計算機通信,數據格式怎么改,是在上位機部分改嗎?想實現用單片機按鍵控制計數器,將數值發給計算機,然后上位機編寫的窗口上能顯示十進制數現在能夠實現的是,發送數據0x01,接收顯示的是81,發送數據0x02,接收顯示的是82,以此類推。能夠幫忙的希望指點一下,萬謝!
2012-12-24 22:58:25
GPS數據格式是由哪些部分組成的?怎樣編寫GPS結構體用來存放接收GPRMC緩存和提取經緯度信息呢?
2021-12-09 06:19:39
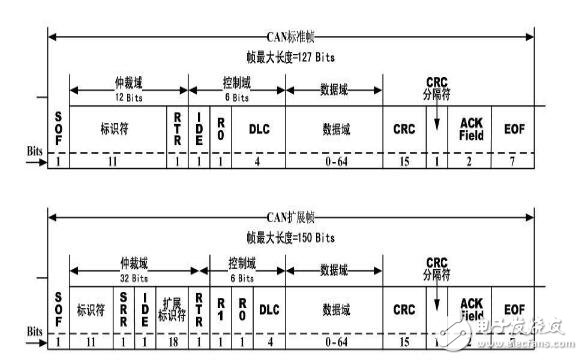
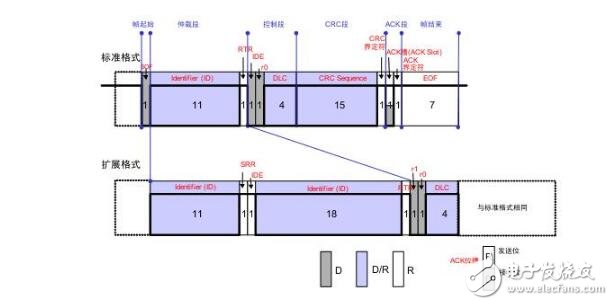
總線上的數據承載能力。數據格式:數據在CAN總線上以幀的形式傳輸,CAN有多種數據格式,通常使用數據幀發送數據。幀格式如下我們需要格外關注仲裁段、控制段和數據段:仲裁段包含CAN ID,標準狀態下為11位(可看作三位十六進制數,例如0x200),拓展幀額外增加了18位,RTR位用來表明...
2021-08-23 08:12:48
MYSQL內部數據格式
2020-06-05 16:34:13
STM32串口通信有哪幾種呢?分別有何優缺點呢?STM32串口通信過程和數據格式是怎樣的?
2021-12-06 06:33:37
總線接口適配器,可進行雙向傳送。本公司所生產的USB接口支持USB2.0,兼容USB1.1;支持CAN協議2.0A和2.0B主動模式;支持擴展幀,支持標準幀格式;支持數據幀,遠程幀格式;支持自動重傳
2011-05-27 09:13:53
VTHD這個寄存器的數據格式是?3.21帶符號格式是什么格式?沒有找到相關說明,那位高人給兄弟指點下,非常感謝!
2023-12-27 07:56:46
1.各種數據格式之間華山論劍2.深入淺出帶你了解TDMS數據格式的用法[hide] [/hide]
2011-11-21 09:38:05
;根據CAN總線的特點和實驗數據,分析了CAN總線在光纖介質下傳輸性能的改善。1 CAN總線的雙絞線及光纖傳輸1.1 CAN總線雙絞線傳輸CAN總線典型的網絡拓撲是總線結構。1993年頒布的同際標準
2018-12-04 10:41:09
文章目錄一.前言二.串口數據的發送與接收三.串口波特率四.串口的數據格式(1)起始位(2)數據位(1)奇偶檢驗位(1)停止位五.物理接口的形式六.TTL、RS232、RS485電平標準六.九針串口
2021-08-06 07:28:23
通信方式:串口通信數據格式:一位起始位,8位數據位,一位停止位波特率: 9600校驗算法:CRC-16 (MODBUS), 具體算法代碼見附錄控制板發送數據幀格式幀頭和幀尾:數據幀以0x9B開始,以
2021-12-03 08:03:35
在 5kbit/s 以下)。? CAN 總線上的節點信息分成不同的優先級,可以滿足不同級別的實時要求,高優先級的數據可以在 134μs 內得到傳輸。? CAN 總線通過報文濾波即可實現點對點、一點
2018-12-13 14:26:31
什么是CAN總線?CAN總線是如何發展的?CAN總線是如何工作的?CAN有哪些特性?Philips制造的CAN芯片有哪些?什么是標準格式CAN和擴展格式CAN?
2021-05-20 06:16:35
什么是GPS模塊?GPS模塊的數據格式是怎樣的?
2021-05-24 07:14:23
CAN總線的幀格式中,為什么數據場只能傳輸8個字節的數據呢?
2020-07-20 16:28:52
can總線本身有一個規范協議can 2.0b,那應用層協議主要是規定哪些內容的(我只知道有分配標識符等),can總線通信的數據格式是不是也是在應用層規定的?哪位高手能不能具體舉例講一下。------謝謝
2011-07-09 02:38:01
和接收器輸入端的數據格式為幀信息格式,與TMS320LF2407的SCI格式相同。通信時,雙方預先約定通信數據傳輸格式、傳輸速率及各自工作方式等。本文設計中雙方約定:波特率為9600bps。1幀信息格式
2018-12-10 10:19:26
在串口的應用中,9位數據格式保含著8位的數據字節及1位的奇偶校驗位。另外在RS485應用中利用奇偶校驗位指出這是數據字節還是地址字節。在初始化串口之后,如下表所示,依照奇偶校驗位的電平,設定
2023-06-15 10:17:54
如何實現規定數據格式的不定長數據的接收?
2021-12-09 07:48:20
本帖最后由 腹了個黑 于 2012-5-21 16:11 編輯
最近剛剛接觸LABVIEW,需要與一個逆變器的控制器進行數據采集,數據格式如下Header(0x55 0xAA
2012-05-21 16:10:06
標準數據格式實用程序
2019-01-23 17:02:05
標準數據格式實用程序快速參考
2019-01-22 11:32:50
STDF (標準測試數據格式) 是我們半導體測試行業的最主要的數據格式,包含了summary信息和所有測試項的測試結果。泰瑞達的Image測試機上都自帶了很多stdf工具,讓你可以讀取和分析stdf
2014-06-18 10:41:11
我們使用 stsw-st25001 讀寫 ST25-04 來配置 Wifi。但根據用戶手冊,它沒有 wifi NEDF 數據格式。我們想分析數據格式,然后開發我們的產品。你能給我發一份
2023-01-16 08:31:56
這是觸摸板芯片發來的數據格式。當觸摸板有數據的時候INT腳會拉低,來通知MCU來讀取數據,數據格式如下:我現在要怎么讀取?接到mcu的引腳有sda,scl,int三個,i2c通訊方式。能給個解決方案嗎?
2017-09-05 14:55:48
車身的傳感器,汽車的各種行駛數據會被發送到“總線”上,這些數據不會指定唯一的接收者,凡是需要這些數據的接收端都可以從“總線”上讀取需要的信息。Can總線的傳輸數據非常快,可以達到每秒傳輸32bytes
2015-06-24 13:56:39
在串口的應用中,9位數據格式保含著8位的數據字節及1位的奇偶校驗位。另外在RS485應用中利用奇偶校驗位指出這是數據字節還是地址字節。在初始化串口之后,如下表所示,依照奇偶校驗位的電平,設定
2023-06-20 08:07:09
引言在一般的項目開發過程中,往往需要兩塊或以上單片機進行通信完成數據傳輸,例如四旋翼無人機在飛行過程中無線傳輸數據回到地面站,治療儀器需要實時將患者和機器運轉情況傳回上位機平臺,糧倉溫控裝置需將各種傳感器通過RS485總線或者CAN總線的方式達到數據傳輸的目的等等,這些...
2021-08-23 09:01:02
的RS-485遠距離通信接口和DSP從機與CAN現場總線的數據傳輸接口設計,同時具備主從機的遠距離通信和CAN現場總線設備的實時通信功能,具有廣泛的應用前景。在設計中充分發揮了DSP的CAN模塊和SCI模塊的作用,使得接口設計簡單,工作更加可靠。
2019-06-14 05:00:10
在VXI總線系統中,為了能夠獲得大量實時數據,需要利用CAN總線快速可靠的傳輸數據的性能,設計一種混合VXI總線和CAN總線的系統。在這種混合系統中要實現CAN總線上各個節點采集
2009-07-06 16:27:58 13
13 本文針對最常見的JPEG 圖像格式的壓縮數據進行分析,描述了每一字節的數據所表示的含義,同時也介紹了JPEG 圖像格式中的大部分典型且必要的標記、參數等元素,這些都是對JPE
2009-09-18 11:05:5916 海洋環境信息是海洋科學研究與信息交流的重要基礎,其數據格式的標準化不僅影響數據的交互性,也是影響海洋環境信息共享的關鍵所在。目前,國內外海洋環境信息數據格式多種
2010-02-22 16:05:327 什么是標準格式CAN和擴展格式CAN?標準CAN的標志符長度是11位,而擴展格式CAN的標志符長度可達29位。CAN 協議的2.0A版本規定CAN控制器必須有一個11位的標志符。同時,在2.0B
2008-10-27 13:08:016281 數據格式,計算機中數據格式詳細介紹 計算機中常用的數據表示格式有兩種,一是定點格式,二是浮點格式。一般來說,定點格式容許的數值范圍
2010-04-13 11:36:003196 提出了一種數據格式轉換方法。使用VHDL語言,采用流水線處理方式將ASCII碼所表示的一定范圍內的實數轉換為單精度浮點數。
2011-11-18 15:39:50732 
本內容介紹了gps數據格式的含義,給出了GPS輸出的是NMEA-0183的數據格式,GPS固定數據輸出語句($GPGGA)
2011-12-19 14:57:0312054 CAN協議與其它現場總線協議的區別中有一個是:它使用同步數據傳輸而不是異步傳輸(面向字符)。這意味著傳輸性能得到更有效的發揮,但是另一方面,這需要更加復雜的位同步方法。
2016-08-16 16:56:392063 CAN 總線的物理連接只需要兩根線,常稱為 CAN_H 和 CAN_L,通過差分信號進行數據的傳輸。CAN 總線有兩種電平,分別為 隱性電平 和 顯性電平,這兩種電平有著類似漏極 I/O 電平信號之間“與”的關系:
2018-07-11 16:31:0012767 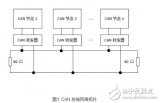
CAN總線原理 CAN總線使用串行數據傳輸方式,可以1Mb/s的速率在40m的雙絞線上運行,也可以使用光纜連接,而且在這種總線上總線協議支持多主控制器。CAN與I2C總線的許多細節很類似,但也有一些
2017-12-07 10:25:5426 基于保證CAN總線網絡傳輸數據時可靠性的目的,采用了從包內數據的可靠性、數據包的可靠性傳輸兩方面進行驗證的方法,通過多次對比使用文章設計的算法、不使用文章設計的算法時CAN總線網絡傳輸數據的準確率
2017-12-21 16:19:060 在各種現場總線中,CAN總線以其結構簡單、應用靈活方便而在工業過程控制和車輛中得到廣泛應用。在CAN的技術規范中,規定了CAN分為數據鏈路層和物理層兩層,用戶在設計通信軟件時,必須先根據需求設計合適
2018-01-08 15:01:029 MCU沒有CAN或CAN接口數量不夠怎么辦?目前市面上有串口轉CAN的相關模塊或設備,但大家知道串口轉CAN是如何實現的嗎?轉換后的幀格式是如何的?本文將為大家詳細介紹串口經過轉換后的CAN幀格式與注意事項。
2019-02-02 16:30:0014376 CAN協議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節點都可以偵聽到所有傳輸的報文。無法將報文單獨發送給指定節點;所有節點都將始終捕獲所有報文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213499 在分析CAN總線雙絞線和光纖傳輸特點的基礎上,提出一種基于光纖收發一體模塊及CAN總線控制器SJAl000的光纖傳輸接口設計方案;詳細介紹光纖收發器的選取及傳輸接口的實現;根據光纖收發一體模塊
2021-04-20 10:24:3733 CAN是一種用于實時應用的串行通訊協議總線,CAN能夠使用雙絞線來傳輸信號,是國際上應用最廣泛的現場總線之一。 can總線工作原理 CAN總線的傳輸方式是串行數據傳輸,能夠在1Mb/s的速率40m
2021-08-07 17:07:4333792 MDB-RS232適配器數據格式分析。讓用戶能夠很容易理解發送和接收的數據格式。快速實現MDB接口的紙幣器,硬幣器和非現金支付刷卡器的數據解析。
2022-04-27 15:50:477 已超過了 CAN總線的功能。越來越多的技術先進的電子模塊有不斷增加的數據要求,這就需要更加靈活的總線協議支持。當越來越多的CAN總線功能開始變得不足時,就需要一個新的解決方案。此外,隨著數據和帶寬需求
2022-06-20 17:40:144968 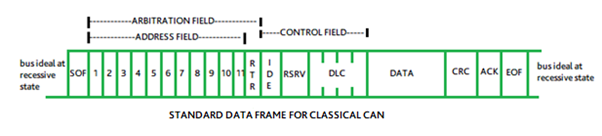
回到 OSI 7 層模型,CAN 總線只有兩層。一,電線,對應于模型的最低或物理級別。另一個,消息格式和 CSMA/CD 過程,大致映射到數據鏈路層。
2022-08-15 11:15:441678 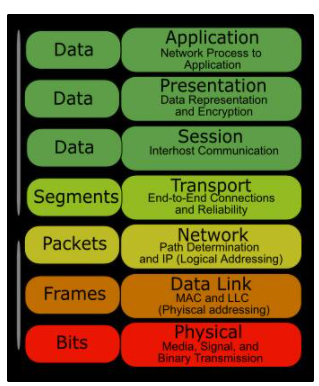
CAN總線上傳輸的信息稱為報文,當總線空閑時任何連接的單元都可以開始發送新的報文。
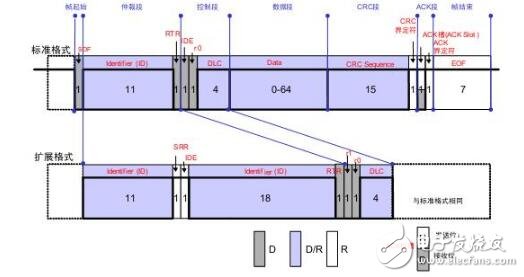
2022-10-17 15:09:493134 在詳解CAN總線:CAN總線報文格式—數據幀文章中,講解到仲裁段。仲裁段用于寫明需要發送到目的CAN節點的地址、確定發送的幀類型(當前發送的是數據幀還是遙控幀),并確定發送的幀格式是標準幀還是擴展幀。
2022-10-25 14:00:181632 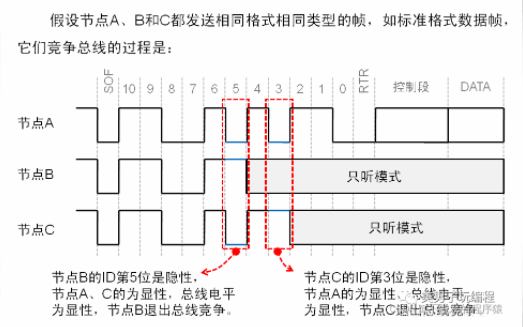
CAN總線由CAN控制器、CAN收發器、數據傳輸線、數據傳輸終端等組成。CB311的ECU(發動機控制單元)、TCU(變速器控制單元)、FEPS(無鑰匙進入和無鑰匙啟動系統)、組合儀表四個電控單元通過CAN總線連接,CAN控制器、CAN收發器均集成在電控單元中。
2022-12-02 11:47:092259 的CANBUS數據,CAN分析儀可以將其可視化。 2、進行CAN數據的格式轉換,比如將CAN數據變為二進制格式、批處理格式、文本格式。 3、進行目標CAN設備波特率的解析,像是我們的CAN分析儀就可以自識別波特率。 4、進行CANBUS數據的過濾,降低總線的負載。 5、檢查CAN數據中存在的
2023-04-17 17:15:02891 本文介紹了串口通訊的基本概念、數據格式、通訊方式、典型的串口通訊標準等內容。
2023-04-23 11:13:154347 
Datumaro 是支持命令行調用的模式,因此我們可以非常方便地使用 1 行命令完成 2 種不同格式數據的轉換,下面我將基于命令行模式,演示一下 Datumaro 處理標注數據格式轉化時的基本方法。
2023-06-13 17:00:41551 
通過 CAN 總線傳輸數據是需要按照一定協議進行的,CAN 協議提供了 5種幀格式來傳輸數據:數據幀、遙控幀、錯誤幀、過載幀和幀間隔。其中數據幀和遙控幀有標準格式和擴展格式兩種,標準格式有 11
2023-07-25 10:36:194969 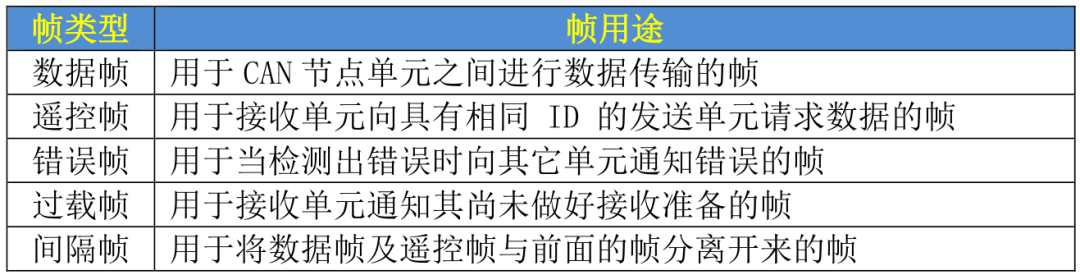
CAN總線協議目前廣泛應用于汽車中各種不同控制器之間的通信,CAN總線的物理應用是采用絕緣的雙絞線來進行信號的傳輸,是世界上應用最廣泛的現場總線,CAN總線本身具有強大的抗干擾能力。
2023-08-11 11:10:29922 
總線的主要特點是高速、可靠和實時性強,因此它是許多實時控制和數據傳輸任務的理想選擇。 Can總線波特率是指Can總線傳輸數據每秒鐘的位數。Can總線波特率一般采用多少主要取決于以下幾個因素: 1. 數據傳輸的速度要求 Can總線被廣泛應用于需要快速、可靠的數據傳輸的場合,例如
2023-09-07 15:05:381642 can總線的傳輸速率是多少?? CAN(Controller Area Network)總線是一種控制區域網絡,是一種高速串行通信總線,廣泛應用于汽車、工業、醫療和家庭等領域。CAN總線是一種實時
2023-09-07 15:05:439442 1、CAN總線的常見故障 CAN總線錯誤分析與解決 當CAN總線出現故障或數據傳輸異常時,往往會出現多種奇怪的故障現象,如儀表板顯示異常,車輛無法啟動,啟動后無法熄滅,車輛動力性能下降,某些電控系統
2023-09-14 16:30:071595 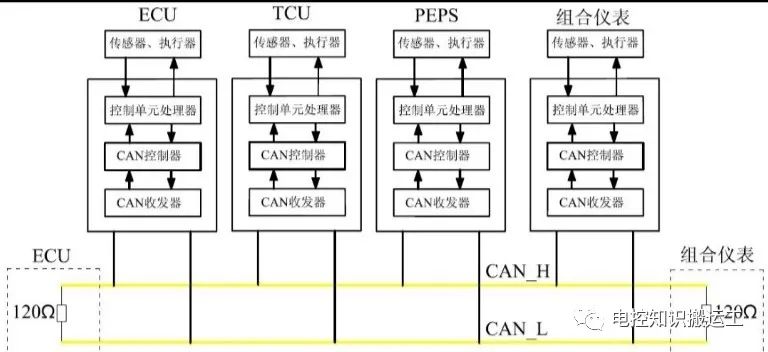
CAN 總線入門:學習 CAN 總線,了解 CAN 總線原理、數據格式。我公司的 USBCAN\CANalyst-II 分析儀都是雙通道產品,兩個通道可以直接組網,通道之間可以相互收發數據,不用接入其他設備就可以實現 CAN 數據的收發。
2023-11-16 17:04:422 CAN總線是數字信號?還是模擬信號? CAN總線是一種數字通信協議,因此可以說是傳輸數字信號的。下面詳細介紹CAN總線是如何以數字信號進行數據傳輸的。 CAN(Controller Area
2023-11-22 18:18:251294 CAN(Controller Area Network)是一種廣泛應用于汽車、工業控制和通信領域的串行通信總線標準。CAN數據幀是CAN總線上傳輸數據的基本單位,它包含了一系列的字段,用于確定
2023-12-01 16:41:501282 can總線傳輸距離? CAN總線是一種串行通信協議,常用于汽車行業中的數據通信。它被廣泛應用于車載電子系統,如發動機控制單元、制動系統、儀表盤和空調控制系統等。CAN總線的主要優勢在于其高可靠性
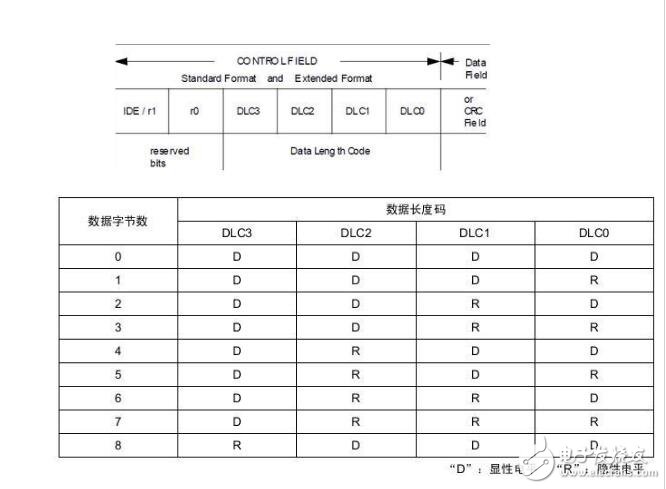
2023-12-07 18:09:401216 can總線的數據幀中數據長度碼和數據字節數的關系? CAN總線是一種常用于數據通信的協議,它使用數據幀來傳輸信息。在CAN數據幀中,數據長度碼(DLC)和數據字節數是緊密相關的。 首先,我們來了
2024-01-31 11:31:52305 請問用CAN存儲器存儲的CAN總線數據幀格式有哪些呢? CAN總線是一種常用于汽車、工業控制和其他應用領域的串行通信協議。在CAN總線中,數據通過數據幀的形式進行傳輸。數據幀包含了發送節點和接收節點
2024-01-31 13:46:38314 CAN總線為什么能在1Mbps上傳輸超過50M? CAN總線是一種被廣泛應用于汽車和工業控制領域的串行通信協議。它可以提供高效、可靠和實時的通信,使得復雜的系統能夠實現數據的傳輸和交流。然而,對于
2024-01-31 13:46:49270 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497 盟通提出的醫療設備CAN/CANopen總線數據傳輸解決方案是基于IXXAT的高性能CAN設備,助力您實現穩定、便捷的數據采集和分析,為您的項目創新提供有利支持。
2024-03-18 14:26:41164 
CAN接口:用于接收和發送CAN總線上的數據。CAN接口通常與CAN總線設備連接,能夠接收來自CAN總線的數據幀,并將其轉換為模塊內部可處理的數據格式。
2024-03-22 15:03:34157 
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論