labview如何快速精確控制步進電機實現定位運動
2022-08-26 11:12:49 4306
4306 
正運動MOVESYNC指令實現多軸同步跟隨功能。
2023-05-31 09:52:17662 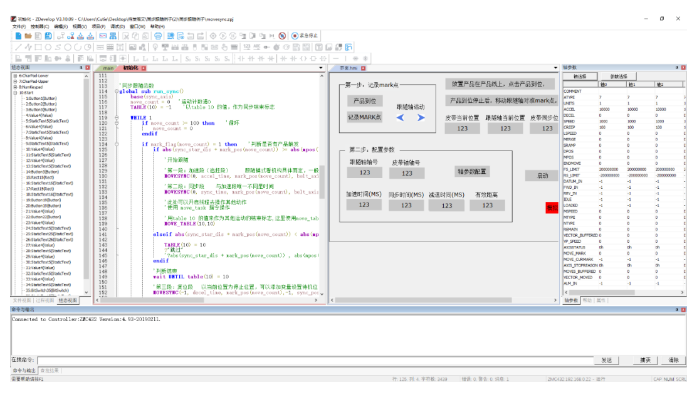
本文將介紹如何驅動和利用LSM6DS3TR-C傳感器,實現精確的運動感應功能。LSM6DS3TR-C是一款先進的6軸慣性測量單元(IMU),集成了三軸加速度計和三軸陀螺儀,可用于測量和檢測設備
2023-11-13 15:45:24779 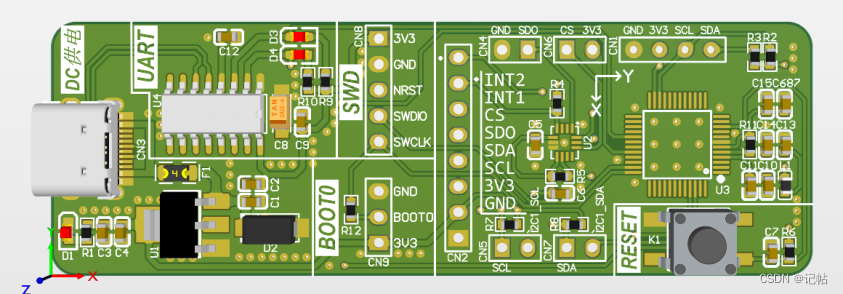
想找一款能快速測量電機表面溫度的儀器,不要求很高的精度,最好是價格便宜點的,哪位大俠能推薦下,先謝謝了!
2014-08-28 10:22:00
ParBERT 81250測量軟件 - 快速眼罩測量用戶指南
2019-07-12 12:52:34
電路板要既可以測量模塊溫度、又可以測量環境溫度請問這兩種分別該怎么實現用什么傳感器、測量電路謝謝
2019-03-18 19:08:03
測量高速信號快速的、比較干凈的測量方法是什么
2021-05-07 07:13:16
本帖最后由 sszx2007 于 2019-6-17 10:35 編輯
做電氣控制的都知道,用PLC寫運動控制的邏輯非常好。LabVIEW最新推出的狀態圖模塊可以幫助工程師方便實現基于UML
2017-07-25 10:03:20
基于雙DSP的運動目標智能跟蹤系統是怎樣設計并實現的?
2021-04-27 06:59:18
運動粘度測量用于廣泛領域的質量控制和表征測試。我們已經探討了一些關于粘度測試的最常見問題; 什么是運動粘度?它是如何衡量的?溫度如何影響粘度?您如何確保粘度測量準確?什么是粘度?粘度的定義是; 衡量
2019-02-22 10:26:15
PLC 等控制器即可實現,對于快速運動或圓弧插補運動,往往需要浮點數運算能力更強、輸出信號頻率更高的專用控制器或芯片來實現。`
2019-01-14 13:46:04
全球領先的高性能功率半導體解決方案供應商Fairchild (NASDAQ: FCS)今天發布了高精度運動跟蹤模塊FMT1000系列產品,此系列產品可將運動智能快速集成至各種系統,包括無人機
2016-03-31 22:16:04
同時安裝labview 2012 和labview2014 以及VAS模塊,在NI MAX中可以調用攝像頭,在LB2012中可以看見視覺運動模塊,但在LB2014中沒有視覺運動模塊,求解
2018-12-30 09:33:44
想試試新唐的MCU,但發現只有少量MCU帶了DAC。
新唐是出于什么考慮不帶DAC模塊呢?
大家用新唐MCU的時候,又是怎么實現快速DAC的呢?
2023-06-27 06:50:07
、胳膊和手的運動與應用程序、菜單內部以及菜單之間的瀏覽、游戲機中的人物動作等設備功能聯系起來,實現真正的人機實時互動。 新模塊結構穩健,抗機械應力,采用與意法半導體銷售量超過6億支的運動傳感器相同
2018-11-14 16:36:40
紅外收發模塊和超生模塊實現測量小車的位移和速度
2017-07-13 15:48:25
labview2014的視覺與運動模塊,vision模塊哪位大神有?急用,謝謝。我的郵箱1612675383@qq.com
2017-02-07 20:09:09
我已安裝運動與視覺模塊,但是安裝QHYCCD的IMG1S無法調用,驅動都正常,請問這是什么原因呀?{:2:},小弟先謝過各位大神
2015-03-19 18:05:13
各位大俠:現在在用labview+運動控制卡的模式開發工控機,不知道labview哪個模塊是專門用于運動控制的,多謝大家指點。
2019-07-13 21:29:39
本文介紹了一種基于H.264標準的快速運動估計算法。
2021-06-03 06:27:37
我最近在做一個項目,但是在選用傳感器的時候有點疑惑,在一個弧形運動(比如單擺的擺動)中如何去測量末端的切向速度或者運動過的角度?我開始時的思路是用陀螺儀,不過后來發現這樣的話只能把傳感器放置在中心位置,這在這里是不被允許的,所以有點困擾,不知道有哪位做過這方面的,能提供點思路嗎?
2012-07-18 20:48:52
本文根據雷達發射機頻率快速變化的特點,采用目前新型的邏輯控制器件研究新型頻率測量模塊,結合等精度內插測頻原理,對整形放大后的脈沖直接計數,實現對下變頻后單脈沖包絡的載波快速測頻。具有測量精度高,測量用時短的特點,能作為脈沖雷達單脈沖瞬時測頻模塊。
2021-05-06 09:34:26
`<p> 運動棒材的直線度該如何檢測? 運動棒材的直線度測量可以采用光電測量法進行測量,通過多臺測徑儀測量信息,經過計算處理即可得到直線度的信息。 直線度測量儀主要
2019-01-10 10:47:02
如何實現基于STM32F103懸掛運動控制系統的設計?
2021-12-23 06:47:52
如何實現小車底盤實際運動整定?
2021-11-01 06:23:00
如題,由于本人是做電源的,所以對電池的容量比較敏感,但回想以往,似乎沒接觸過能夠快速測量電池容量的方法。過往按照常規方法,最簡單的方式就是帶載測試,以恒流或恒功率通過若干小時的放電過程來計算電池
2013-06-14 21:23:24
怎樣去描述速率適配算法?如何快速實現FPGA的速率匹配?
2021-04-08 07:01:15
如何快速精確地測量Gamma曲線?有哪些步驟流程?
2021-05-06 08:14:38
您想在高速信號上進行快速而又比較干凈(精確)的測量嗎?沒時間把探頭尖端焊接到器件上?不確定高速設計的問題來自哪兒?這些都是工程師們經常遇到的問題。隨著時間壓力越來越大,偶發問題阻礙項目竣工,您需要一種快捷、簡便、高性能的方法,來測量高速信號。
2019-08-09 08:21:46
本文設計了一種高精度時間間隔測量模塊,介紹了該模塊的軟硬件實現方法。大量實驗證明本模塊可以實現對微小時間間隔的精確測量,具有很高的應用價值。
2021-05-17 07:03:28
工業運動控制的測量技術怎么選?這些問題你要弄明白
2021-01-21 07:59:21
想做一個體感的軟件,目前已經定位到頭部,如何進行胳膊等肢體的識別,求大神幫忙
2015-05-30 10:32:44
怎么實現基于SOPC的運動視覺處理系統的設計?
2021-06-04 06:33:28
多普勒測量系統利用多普勒效應測量運動目標(固體、液體或氣體)的速度。最著名的應用大概要算雷達槍了,交通巡警利用它檢測超速汽車。
2019-10-22 06:30:44
通過審視五種運動檢測模式——加速度(包括平移運動,如位置和方向)、振動、沖擊、傾斜和旋轉,各自的可能性,可以超越當今大量MEMS應用的范圍,極大地擴大應用選項。MEMS加速度計和陀螺儀如何通過五類運動檢測實現各類最終產品的變革?接下來我們舉例來說明~
2019-07-30 07:47:02
具有基于虛擬現實的運動跟蹤功能的上臂外骨骼的設計和分析摘要:機器人康復是治療腿部或肢體受傷的患者的新療法。患者的第二個選擇是使用機器人康復,而不是傳統的康復,因為機器人康復消耗更少的錢和更短的時間
2021-09-01 06:10:43
想要視覺與運動模塊!! 求助…………
2012-11-01 15:31:36
求助,如何用腦電波模塊控制機械手臂棘爪的運動。可以加QQ私聊。只實現單一功能起價800元,不算元器件。997206771
2016-06-17 22:58:53
正運動技術運動控制器EtherCAT 總線快速入門。 視頻教程:《視頻教程:正運動控制器EtherCAT總線..
2021-09-07 06:59:12
EtherCAT總線擴展模塊包含哪些?怎樣去使用正運動技術運動控制器EtherCAT總線?
2021-09-27 08:34:04
Labview學習運動控制卡例程。-使用運動控制卡USB_AMC2XE V1.0及單杠絲滑臺進行硬件的設備連接,實現上位機與硬件設備之間的通訊,進行運動控制效果定長運動、回原點運動實驗講解,以及進行
2021-11-26 10:38:50
氣動人工肌肉運動位移測量系統設計全攻略,總結的太好了
2021-04-15 06:47:18
求LabVIEW的視覺與運動模塊安裝包2018版的!萬分感謝!!
2019-08-13 00:09:38
本文詳細介紹了一個測量各類海德漢編碼器的數據的通用且實用的模塊。該模塊基于Xilinx FPGA平臺和TI DSP平臺,使用和調試方便,使用者可快速掌握;通過了實驗和精度的檢測,實現了設計目的,工作可靠;模塊小巧,可以與上位機通信,可以很好的被結合到嵌入式系統中。
2021-04-30 07:01:32
如果一臺PLC能安裝codesys內核,并且這臺plc有can總線,支持CANopen協議,那么通過codesys里的庫指令+CANopen,是不是就可以實現直線插補,圓弧插補,甚至可以實現更復雜
2023-01-09 23:13:35
labview肢體比對的話,大概應該有哪幾個方面啊,感謝大佬
2019-10-16 21:42:00
跪求2014 的運動控制模塊下載鏈接
2017-05-06 21:56:45
使用LabVIEW FPGA 模塊和可重新配置I/O 設備開發測量與控制應用通過使用LabVIEW FPGA 模塊和可重新配置I/O(RIO)硬件,NI 為您提供了一種直觀可用的解決方案,它可以將
2009-07-23 08:15:57
求一個《基于超聲波測距模塊的速度測量方案設計》,設計需要實現一種新的方案,對2cm-4.5m內運動物體的速度進行測量。本設計采用超聲波測距模塊為信號輸入端,以51單片機為控制單元,通過對超聲波信號
2012-11-23 10:33:05
手里有MPU9250和18f46k22要做陀螺儀的運動軌跡測量怎么下手???
2016-08-04 11:55:55
在通道之間如何實現快速切換、進行準確的測量和保持低功耗?
2021-04-02 07:33:36
的差距,進而結合教練的指導,調整自己的訓練,更快地提高競技水平,達到教練員的要求。采用專業高速攝像儀捕捉運動員跳水瞬間,可以實現以下功能:(1)、能夠從50~100m外針對運動員姿態進行姿態測量。針對
2016-05-20 15:26:03
、不干擾肢體動作、在接近實際的工作條件測量等優點。對人體運動信息的檢測和處理是以人體運動作為研究對象的。精確測量和分析人體各部分在運動過程中的位移、速度、加速度、相互作用力及肌電信號,并對其進行處理
2016-06-07 11:35:24
現代運動模擬器對響應快速性、跟蹤準確性等仿真運動特性提出了更高要求,使得并聯機器人機構的運動控制更為復雜。以某型潛艇操縱模擬器為例,其控制軟件采用模塊化設
2009-06-01 10:53:32 23
23 提出了一種基于運動特性的自適應快速運動估計算法。該算法充分利用視頻圖像序列的運動特征進行運動模式判定,實現了一種簡單高效的搜索方法,并且根據不同的運動模式動態
2009-08-15 07:59:4218 在金屬板材、塑料、玻璃等的生產過程中,需要對生產出的縱向運動的板材進行在線橫向切割,并且切割是精確定長的,這就要求在對運動板材測量的同時進行快速準確的切割
2009-08-28 08:16:1631 序列圖像運動目標檢測的一種快速算法:研究了序列視頻圖像中運動目標的檢測與跟蹤快速算法.研究基于Kalman濾波理論的漸消記憶最小二乘法,用該方法重建背景圖像;采用圖像差
2009-10-26 11:23:2337 該文針對全局運動估計計算復雜度過高的問題,提出了一種基于運動矢量對消和差分原理的快速全局運動估計方法。基于不同象限運動矢量對之間存在的對稱抵消特性,首先估計出
2009-11-20 15:26:5912 基于運動控制技術的非球面測量系統:為滿足非球面光學元件表面精度的測量要求,設計和實現了一種高效數控非球面測量系統. 系統基于運動控制技術,構建了四軸聯動的測量工作平臺
2010-01-01 11:34:489
MIO(motive)心率表——運動星IV型快速使用指引
五 運動計時器的使用
1. 進入運動計時模式(屏幕顯CRN)
2. 按設定/開始鍵
2010-01-20 15:20:1823 由于實際場景的多樣性,目前常用的運動目標檢測算法都還存在一定程度的缺陷,因此本文提出了一種將幀差法和背景減法相結合的方法,實現快速精確地檢測和提取運動目標。實
2010-07-27 16:42:0713 介紹利用CPLD實現快速、同步計算的虛擬相位測量方法,講述系統的原理與結構,給出CPLD的模塊設計。
2010-08-09 14:58:5819 摘??? 要:本文主要介紹了一種基于加速度傳感器ADXL105和無線數傳模塊的運動員起跑反應時測量系統的設計和實現方案。該系統能夠實時采集運動員的反應時,并對其進
2011-08-10 17:44:131005 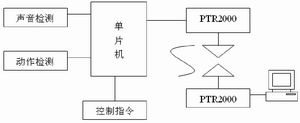
【摘 要】介紹了通過圖像處理方法實現傳送帶上運動物體的圖像恢復及幾何參數測量,并將其應用到羽毛球生產中毛片的在線彎度、粗細測量中。詳細敘述了線性運動圖像恢復的
2009-05-19 21:18:001623 
基于虛擬儀器的氣動人工肌肉運動位移測量系統的實現
0 引言
氣動人工肌肉也稱氣動人工肌肉驅動器(Pneumatic Musecle Actuator,PMA),其研究始于20世紀50代,
2009-12-14 10:57:20739 ST 多軸運動傳感器模塊實現精確的運動檢測功能
意法半導體(紐約證券交易所代碼:STM), 在單一模塊內成功集成一個3軸數字加速傳感器和一個2軸模擬陀螺儀。線性
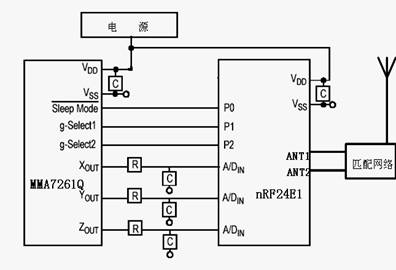
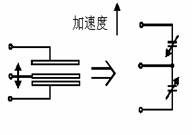
2009-12-29 17:51:291138 ZigBee模塊的運動數據采集與傳輸設計
ADl公司的ADIS16355提供完全的三軸慣性檢測(角度運動與線性運動)。內核采用iMEMS傳
2010-04-16 15:07:36980 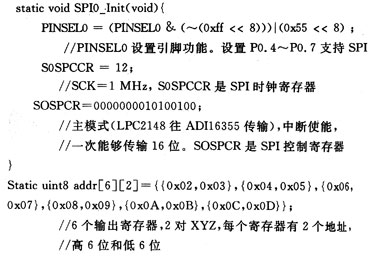
本文實現了一個測量運動員(聽覺)神經-運動反應時的系統,以提高運動員聽到發令槍后的起跑速度。該系統是通過聲音傳感器和加速度傳感器檢測運動員聽到發令槍到起跑所
2010-08-30 11:15:281175 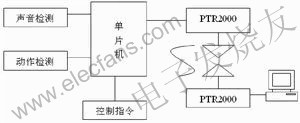
摘 要: 設計了一套快速反應嵌入式智能安防監控系統,實現對運動目標的跟蹤、定位,快速捕獲人臉圖像。利
2011-01-05 13:43:30650 
設計了一種高精度時間間隔測量模塊,該模塊由單片機控制,采用脈沖計數原理,通過測量時間間隔內高頻參考時鐘個數,得到被測時間間隔的精確值。該模塊具有結構簡單,易于實現
2011-09-20 17:23:063259 
系統由PCI-1411視頻采集卡和LabVIEW數字圖像處理平臺構成。通過對采集到的肢體運動狀態視頻分幀進行處理,建立了肢體關節運動的相關數學模型,獲得了較為準確的肢體運動參數。研究結
2011-11-04 11:08:0928 )大會上宣布推出MM7150運動模塊,此模塊整合了Microchip SSC7150運動協處理器和9軸傳感器,包含加速計、磁力計和陀螺儀,封裝小巧易于使用。
2015-03-02 11:32:201101 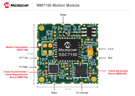
基于曲面線接觸加工中全軟件數控系統實現多軸運動控制的目的,介紹了一種基于單片機+FPGA的多軸運動控制卡的設計方法,該卡可以實現五軸控制。采用模塊化的設計思想設計出了運動控制卡的總線、總線驅動、數據
2016-01-04 15:02:290 基于光流的運動目標檢測跟蹤快速算法_關興來
2017-03-16 15:42:481 基于Kinect的下肢體康復動作評估系統_楊文璐
2017-03-19 11:41:230 基于研華ADAM模塊的溫度測量系統設計
2017-04-20 11:33:2714 GHN系列高性能多軸網絡運動控制器是一款網絡型、模塊化的插卡式運動控制器。控制器主卡實現基本的運動規劃,軸控模塊完成與外部硬件交互,主卡與軸控模塊、軸控模塊之間通過gLink-II總線進行通信。客戶
2017-09-23 10:55:363 MELSEC-Q系列電力測量模塊,可直接插入可編程控制器,簡單實現各種電能信息的測量。為滿足日益增長的市場需求,本次全新推出電力測量模塊新產品,支持三相4線制。特點: 1. 節省空間,簡單實現追加安裝 2. 節省接線/減少工程作業 3. 易于進行電力測量、原單位※1管理 4. 可簡單構建可視化系統
2017-09-29 17:48:074 本文基于MSP430單片機設計了一種手持式便攜設備,采用心率傳感器,基于心率測量原理實現人體運動后心率的測量,然后通過運動負荷轉換算法計算出用戶運動效果。
2018-04-27 08:46:336 針對圖像拼接時用隨機抽樣一致性( RANSAC)算法迭代計算過程中計算量大、匹配正確率低的問題,提出了一種基于運動平滑約束項的誤匹配剔除算法。首先采用快速旋轉不變特征( ORB)算法提取特征
2019-01-03 14:50:581 一、任務設計并制作一個管道內鋼珠運動測量裝置,鋼珠運動部分的結構如圖 1 所示。裝置使用 2 個非接觸傳感器檢測鋼珠運動,配合信號處理和顯示電路獲得鋼珠的運動參數。
二、要求
2019-08-14 08:00:0015 GTN系列多軸網絡運動控制器是一款網絡型、模塊化的插卡式運動控制器。控制器主卡實現基本的運動規劃,軸控模塊完成與外部硬件交互,主卡與軸控模塊、軸控模塊之間通過gLink-II總線進行通信。客戶可以
2019-08-19 08:00:001 智能功率模塊運動 SPM&174;
2022-11-15 20:00:030 河北穩控科技VM系列振弦采集模塊 快速測量( 10Hz) 快速測量是上一節“ 測量時長與優化” 的一種具體應用, 通過時間參數合理設置,可以實現快速頻率激勵、 讀取,最高可達每秒 10 次或更高
2022-12-12 10:05:55396 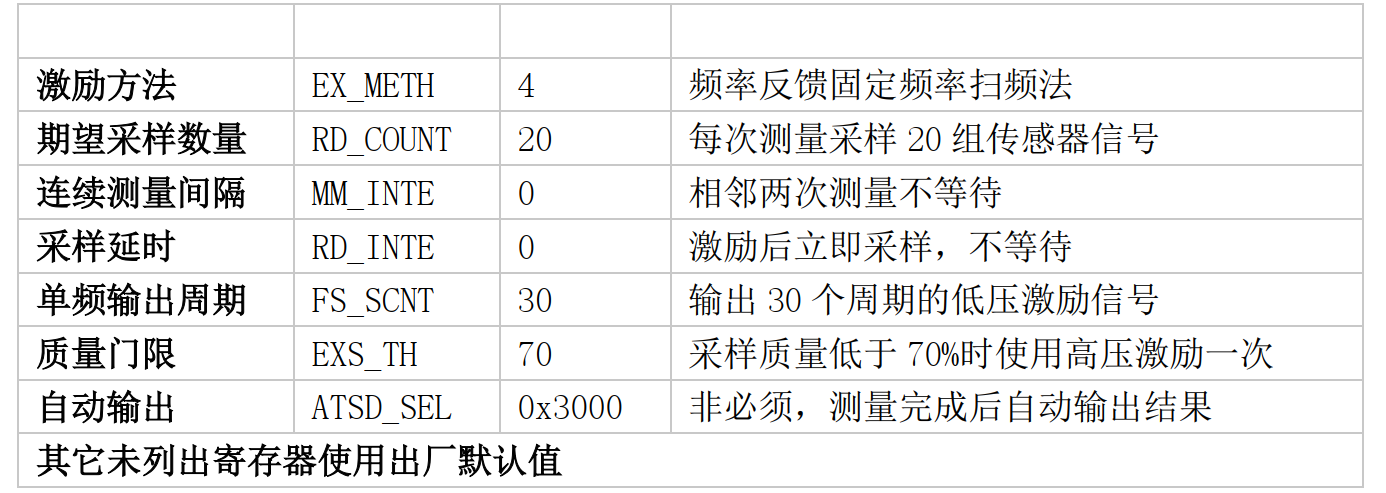
模塊化編程是現在開發的基本思路之一,能夠實現快速移植到不同平臺,從而達到開發一次多端使用到的效果;在畫PCB的時候也會遇到類似的模塊,有沒什么辦法實現模塊復用呢,今天就給各位帶來一種方法;
2023-01-06 14:36:182146 到怎么控制機械臂的基本運動和人臉識別是如何實現的,在這里就不再復述了,本篇的內容主要是介紹是如何完成運動控制模塊的。 使用到的設備 mechArm 270 -Pi ,適配的攝像頭 設備的詳情可以了解前文
2023-02-10 16:07:281108 
ZMC運動控制器SCARA機械手應用快速入門
2021-09-23 11:30:341384 
此前,我們依次講解了軟硬件介紹及計數實例、相機的基本使用、基于形狀匹配的視覺定位以及BLOB有無檢測等。
今天,正運動技術為大家分享一下VPLC系列機器視覺運動控制一體機快速入門(五),和大家一起分享機器視覺常用的檢測功能---測量尺寸。
2021-09-26 18:06:20653 
VPLC系列機器視覺運動控制一體機快速入門(八)實現測量點/直線/圓的功能
2021-10-14 18:39:58593 
根據工件的形狀自動定位測量對象、匹配模板、測量評價、報表生成,實現一鍵式快速準確測量。VX3000系列快速一鍵測量儀閃測儀可以滿足各類零部件輪廓尺寸快速測量需求,工
2022-06-27 17:47:491157 
外骨骼是通過動力控制實現人機交互的技術,與人的匹配度更高,相當于人類肢體的延伸。
2023-09-20 17:42:22598 
使用如ADI公司提供的高精度、低噪聲、高速A/D轉換器,例如用于ADMX3652模塊中的器件,這類芯片專為高分辨率測量系統設計,能夠滿足六位半電壓測量所需的精度指標。
2024-03-13 14:36:51135 隨著電子行業的飛速發展,貼片機作為電子制造中的關鍵設備,其性能直接影響著電子產品的生產效率和質量。貼片機的核心部件之一是X-Y運動模塊,它負責將電子元件快速準確地貼裝到電路板上的預定位置。本文旨在探討貼片機X-Y運動模塊的設計原理、關鍵技術和未來發展趨勢。
2024-03-20 09:55:01167 
 電子發燒友App
電子發燒友App


 (b)???????????????????????????????????????????????????????????????????? (c)
(b)???????????????????????????????????????????????????????????????????? (c)







 工商網監
工商網監
評論