 電子發燒友App
電子發燒友App


摘 要:本文通過合理選擇步進電機相繞組細分電流波形,提出并介紹了基于80C196MC單片機控制的步進電機恒轉矩斬波恒流細分驅動方案、技術實現及其應用。
引言
步進電機是一種將離散的電脈沖信號轉化成相應的角位移或線位移的電磁機械裝置,它具有轉矩大、慣性小、響應頻率高等優點,已經在當今工業上得到廣泛的應用,但其步矩角較大,一般為1.5o~3o,往往滿足不了某些高精密定位、精密加工等方面的要求。實現細分驅動是減小步距角、提高步進分辨率、增加電機運行平穩性的一種行之有效的方法。本文在選擇了合理的電流波形的基礎上,提出了基于Intel 80C196MC單片機控制的步進電機恒轉矩細分驅動方案,其運行功耗小,可靠性高,通用性好,具有很強的實用性。
細分電流波形的選擇及量化
步進電機的細分控制,從本質上講是通過對步進電機的勵磁繞組中電流的控制,使步進電機內部的合成磁場為均勻的圓形旋轉磁場,從而實現步進電機步距角的細分。一般情況下,合成磁場矢量的幅值決定了步進電機旋轉力矩的大小,相鄰兩合成磁場矢量之間的夾角大小決定了步距角的大小。因此,要想實現對步進電機的恒轉矩均勻細分控制,必須合理控制電機繞組中的電流,使步進電機內部合成磁場的幅值恒定,而且每個進給脈沖所引起的合成磁場的角度變化也要均勻。我們知道在空間彼此相差2p/m的m相繞組,分別通以相位上相差2p/m而幅值相同的正弦電流,合成的電流矢量便在空間作旋轉運動,且幅值保持不變。這—點對于反應式步進電機來說比較困難,因為反應式步進電機的旋轉磁場只與繞組電流的絕對值有關,而與電流的正反流向無關。以比較經濟合理的方式對三相反應式步進電機實現步距角的任意細分,繞組電流波形宜采用如圖1所示的形式。
圖中,a為電機轉子偏離參考點的角度。ib滯后于ia,ic超前于ia。此時,合成電流矢量在所有區間b=Ime-ja,從而保證合成磁場幅值恒定,實現電機的恒轉矩運行。且步進電機在這種情況下也最為平穩。將繞組電流根據細分倍數均勻量化后,所得細分步距角也是均勻的。為了進一步得到更加均勻的細分步距角,可通過實驗測取一組在通入量化電流波形時的步進電機細分步距的數據,然后對其誤差進行差值補償,求得實際的補償電流曲線。這些工作大部分由計算機來完成。在取得校正后的量化電引言
步進電機是一種將離散的電脈沖信號轉化成相應的角位移或線位移的電磁機械裝置,它具有轉矩大、慣性小、響應頻率高等優點,已經在當今工業上得到廣泛的應用,但其步矩角較大,一般為1.5o~3o,往往滿足不了某些高精密定位、精密加工等方面的要求。實現細分驅動是減小步距角、提高步進分辨率、增加電機運行平穩性的一種行之有效的方法。本文在選擇了合理的電流波形的基礎上,提出了基于Intel 80C196MC單片機控制的步進電機恒轉矩細分驅動方案,其運行功耗小,可靠性高,通用性好,具有很強的實用性。
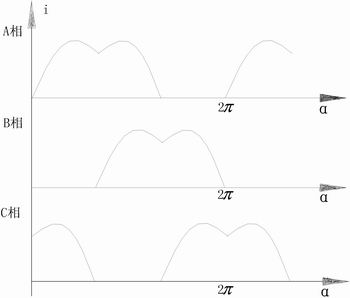
圖1 反應式步進電機繞組電流波形

圖2 硬件系統原理框圖
細分電流波形的選擇及量化
步進電機的細分控制,從本質上講是通過對步進電機的勵磁繞組中電流的控制,使步進電機內部的合成磁場為均勻的圓形旋轉磁場,從而實現步進電機步距角的細分。一般情況下,合成磁場矢量的幅值決定了步進電機旋轉力矩的大小,相鄰兩合成磁場矢量之間的夾角大小決定了步距角的大小。因此,要想實現對步進電機的恒轉矩均勻細分控制,必須合理控制電機繞組中的電流,使步進電機內部合成磁場的幅值恒定,而且每個進給脈沖所引起的合成磁場的角度變化也要均勻。我們知道在空間彼此相差2p/m的m相繞組,分別通以相位上相差2p/m而幅值相同的正弦電流,合成的電流矢量便在空間作旋轉運動,且幅值保持不變。這—點對于反應式步進電機來說比較困難,因為反應式步進電機的旋轉磁場只與繞組電流的絕對值有關,而與電流的正反流向無關。以比較經濟合理的方式對三相反應式步進電機實現步距角的任意細分,繞組電流波形宜采用如圖1所示的形式。
圖中,a為電機轉子偏離參考點的角度。ib滯后于ia,ic超前于ia。此時,合成電流矢量在所有區間b=Ime-ja,從而保證合成磁場幅值恒定,實現電機的恒轉矩運行。且步進電機在這種情況下也最為平穩。將繞組電流根據細分倍數均勻量化后,所得細分步距角也是均勻的。為了進一步得到更加均勻的細分步距角,可通過實驗測取一組在通入量化電流波形時的步進電機細分步距的數據,然后對其誤差進行差值補償,求得實際的補償電流曲線。這些工作大部分由計算機來完成。在取得校正后的量化電流波形之后,以相應的數字量存儲于EEPROM中的不同區域,量化的程度決定了細分驅動的分辨率。
斬波恒流細分驅動方案及
硬件實現
斬波恒流細分驅動方案的原理為:由單片機輸出EEPROM中存儲的細分電流控制信號,經D/A轉換成模擬電壓信號,再與取樣信號進行比較,形成斬波控制信號,控制各功率管前級驅動電路的導通和關斷,實現繞組中電流的閉環控制,從而實現步距的精確細分。系統原理框圖如圖2所示。
控制電路
控制電路主要由80C196MC單片機、晶振電路、地址鎖存器、譯碼器、EEPROM存儲器及可編程鍵盤/顯示控制器Intel-8279等組成,受控步進電機的細分倍數、運行脈沖頻率、正反轉、運行速度、單次運行線位移、啟/停等的控制,既可由鍵盤輸入,也可以通過串行通信接口由上位機設置。狀態顯示提供當前通電相位、相電流大小、電機運行時間、正反轉、當前運行速度、線位移及相關計數等信息顯示,并將工作狀態和數據傳送給上位機。傳感器(霍爾傳感器)用于檢測計數器的當前值。單片機是控制系統的核心其主要功能是輸出EEPROM中存儲的細分電流控制信號進行D/A轉換。根據轉換精度的要求,D/A轉換器既可以選擇8位的,亦可選擇12位的。本控制系統選用的是8位D/A轉換器MAX516,MAX516把4個D/A轉換器與4個比較器組合在單個的CMOS IC上,4個D/A轉換器共享一個參考輸入電壓VREF。每個轉換器的輸出電壓均可采用下式表示:
VDACi=VREFN/256
N=0,l,......,255,對應于8位的DAC的輸入碼D0—D7(此處為細分電流控制信號)。通過調節VREF的變化范圍,便可調節步進電機繞組中電流的幅值。
功率驅動電路
工作中,步進電機細分電流控制信號的D/A轉換值Ui輸入到MAX516內部各比較器COMPi的同向輸入端,繞組電流取樣信號Vi輸入到COMPi的反向輸入端。斬波恒流驅動采用固定頻率的方波與比較器輸出信號調制成斬波控制信號,控制繞組的通電時間,使反饋電壓Vi始終跟隨D/A轉換輸出的控制電壓Ui。合理選擇續流回路就可使繞組中的電流值在一定的平均值上下波動,且波動范圍不大。
調制用方波信號頻率為21.74KHz,由80C196MC的P6.6/PWM0端產生,且各相是同頻斬波,不會產生差拍現象,所以消除了電磁噪聲。為防止因比較器漂移或干擾導致功率開關管誤導通,讓斬波控制信號和相序控制信號相與后控制功放管。
當開關管截止時,并聯RC、快恢復續流二極管D、繞組L及主電源構成泄放回路。與單純電阻釋能電路相比,RC釋能電路使功耗和電流紋波增加較小,而電流下降速度大大加快。電流取樣信號由精密電流傳感放大器MAX471完成。當繞組電流流過其內部35mΩ精密取樣電阻時,經內部電路變化,轉換為輸出電壓信號:
VOUT=ROUT×(ILOAD×500mA/A)
其中ROUT為MAX471外部調壓電阻,阻值按設計要求選定。ILOAD為流過精密電阻的相繞組電流。MAX471同時具有電流檢測與放大功能,從而大大方便了整個電路的設計與調試。
功率開關管(功放管)是功放電路中的關鍵部分,影響著整個系統的功耗和體積。由于所設計的驅動器主要用來驅動額定電流3A、額定電壓27V以下的步進電機,故選用高頻VMOS功率場效應晶體管IRF540(VDS=100V,RDS(on)=0.052W,ID=27A)作為開關管。IRF540導通電阻很小,因此,即使電機長時間運轉,該VMOS管殼本身的溫度也比較低,無須外加風扇。
為了提高步進電機的工作可靠性,消除電機電感性繞組的串擾,本系統無論從驅動部分還是反饋部分都進行了隔離。驅動隔離采用高速光電耦合器6N137為隔離元件,一方面可以實現前級控制電路同步進電機繞組的隔離;另一方面使功率開關管的驅動變得方便可靠。反饋通道的濾波部分采用無源低通濾波器,其作用是高速衰減繞組(電感線圈)在開關時截止頻率以上的瞬時高頻電壓信號,從而避免控制電路做出太迅速的反應,可以有效地防止步進電機的振蕩。線性光耦合電路的作用是將濾波后的采樣電阻反饋信號線性地傳輸給比較器。
軟件設計
步進電機細分驅動系統的軟件主要由主控程序、細分驅動程序、鍵處理程序、顯示數據處理及顯示驅動程序、通信監控程序等部分組成。
細分驅動電路的主控制程序控制整個程序的流程,主要完成程序的初始化、中斷方式的設置、計數器工作方式的設置及相關子程序的調用等。初始化包括8279各寄存器、8279的顯示RAM、80C916MC的中斷系統及內部RAM等。在80C196MC的各中斷中,使用了INT15、INT14和INT13這三個中斷,其中,INT15為高優先級。在運行狀態下,當有停止鍵按下時,則INT15中斷服務程序將T1關閉,從而使步進電機停止。T1控制每一步的步進周期,該服務程序基本上只作重置定時器和置標志位的操作,而其它操作均在主程序中完成。主程序流程圖見本刊網站。
細分驅動程序中,細分電流控制信號的輸出采用單片機片內EEPROM軟件查表法,用地址選擇來實現不同通電方式下的可變步距細分,從而實時控制步進電機的轉角位置。其流程圖如圖4所示。
步進電機的正反轉控制是通過改變電機通電相序來實現的。為達到對步進電機啟/停運行過程的快速和精確控制,從其動力學特性出發,推導出符合步進電機矩頻特性的曲線應該是指數型運行曲線,并將這一曲線量化后,存入EEPROM。步進電機在運行過程中,每個通電狀態保持時間的長短,由當前速度對應的延時時間值決定。
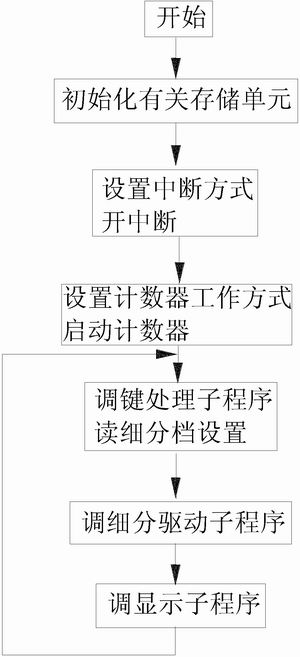
圖3 步進電機細分驅動控制主程序流程圖
結語
本文提出并實現的步進電機均勻細分驅動系統,最高細分達到256細分,能適應大多數中小微型步進電機的可變細分控制、較高細分步距角精度及平滑運行等要求。大量新型元器件的采用,使所設計的驅動器具有體積小、細分精度高、運行功耗低、可靠性高、可維護性強等特點。系統軟件功能豐富,通用性強,從而使控制系統更加靈活。
該驅動控制系統已經用于“全自動高精度線材切割機”的驅動控制系統中,實現了較高的穩速精度和切割精度,慣性小,運行可靠,取得了滿意的效果。
- 機恒轉矩(5122)


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。 舉報投訴
相關推薦
80C196單片機是不是壞了
MC33991二相步進電機驅動集成電路相關資料下載
恒轉矩調速方式和恒功率調速方式
恒轉矩負載應該用什么控制方式的變頻器
步進電機14問
步進電機14問
步進電機中的力矩、轉矩與扭矩有什么區別
步進電機可以連續運轉嗎? 精選資料分享
步進電機基礎-步進電機的原理與特性之基礎理論
步進電機小常識
步進電機控制系統為什么要采用開環控制方式?
步進電機是如何增加動態轉矩的?有什么方法嗎
步進電機的原理與特性之基本特性 相關資料分享
步進電機的有關知識
步進電機的特性測量方法有哪些
步進電機的脈沖頻率與轉矩的數學關系是什么?
Product Introduction新型電機性能測試系統
一張圖看懂步進電機的轉矩頻率特性
二相混合式步進電機電磁轉矩的原理是什么?
什么叫步進電機的牽入轉矩?
伺服電機和步進電機在性能上有哪些差異?
伺服電機和步進電機的區別
基于單片機的步進電機驅動控制設計
如何正確選擇伺服電機和步進電機
當電機的旋轉速度改變時,其輸出轉矩會怎樣?
怎樣選擇步進和伺服電機
恒興隆機電:深圳恒轉矩雕銑電主軸有什么功能特點?
恒功率電主軸與恒轉矩電主軸相比哪種好?深圳廠家
想做一個近似恒轉矩的單相交流電機調速器
用80C51單片機設計一個步進電機控制器
通過簡單的接線配置將單極步進電機驅動為雙極步進電機
基于80196 與PBL3717 的步進電機控制介紹系統
 48
48Intel16位單片機的特殊串行通訊方式
2480C196MC 的外設事務服務器及其應用
13基于80C196KC的微機勵磁調節器
36基于80C196MC的步進電機斬波恒流均勻細分電路的實現
32基于80196與PBL3717的步進電機控制系統
29靈活步進電機驅動器-MC-22006600X系列
23基于80C196KC和80C196MC雙單片機的通用伺服控制
54MC33991型二相步進電機驅動器
64基于MC56F8323的步進電機高速細分驅動模塊
8080C196MC單片機實現多處理機互聯技術應用
23基于80C196的頻率測量及在電壓采樣中的應用
 984
984
Intel80C196MC微處理器在靜止逆變電源中的應用
1063
80C196MC單片機波形發生器原理及其在逆變電源中的應用
2091
什么是保持轉矩(HOLDING TORQUE)?
9751
步進電機的選購方法
1035IPM門極驅動隔離電路
3240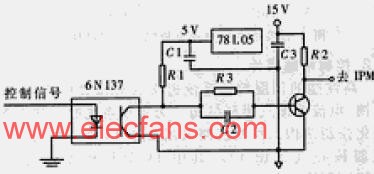
基于80C196MC的可控硅中頻電源控制技術的研究
10380C196MC在交流電機變頻器中的應用
271恒轉矩中編碼器的作用
1186步進電機保持轉矩與定位轉矩概念解析
18228
高轉矩雙極性步進電機驅動器的解決方案詳細中文概述
15什么是步進電機?步進電機的特點,分類與原理!
36654
以80C196MC單片機為控制核心的步進電機恒轉矩斬設計
1420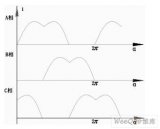
步進電機轉矩的選擇
12873MC100EP196B 具有FTUNE的3.3 V ECL可編程延遲芯片
MC100EP196 3.3 V ECL可編程延遲芯片

步進電機基本結構
10101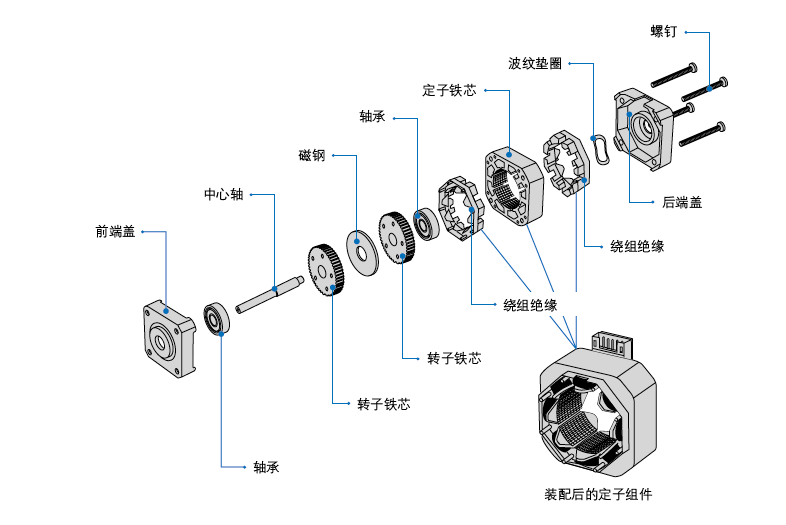
步進電機靜態轉矩特性的測量方法
3881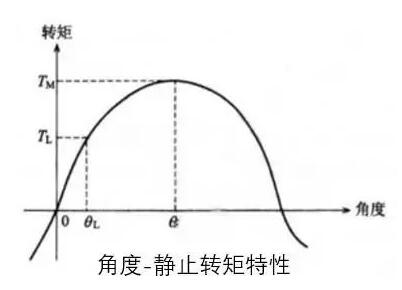
POWERMAX M和P系列步進電機的簡介和特點說明
11步進電機在高速時增加轉矩的方法
5489
步進電機的主要特性與基本特性
10550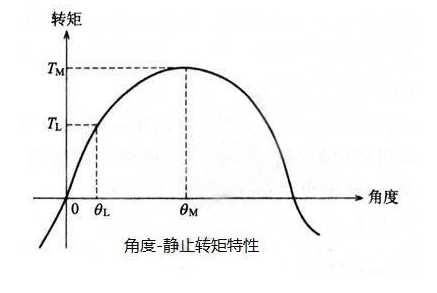
步進電機選型的步驟及步進電機選型方法
25692直線絲桿步進電機應用原則
258280C196MC單片機波形發生器原理及其在逆變電源中的應用
12如何使用FPGA實現步進電機細分驅動器
28步進電機的特性介紹
5566
80C196MC單片機波形發生器原理及其在逆變電源中的應用
4
步進電機的基本特性
454
步進電機原理介紹
9步進電機增加動態轉矩的解決方法
0步進電機的選擇方法 選擇電機的計算方法
0步進電機的原理與特性之基本特性
2選用步進伺服電機替換步進電機,有什么優勢?
388
步進電機可以配什么減速機?
863- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察



版權所有 ? 深圳華秋電子有限公司
電子發燒友 (電路圖) 粵公網安備 44030402000349 號 電信與信息服務業務經營許可證:合字B2-20210191 工商網監
湘ICP備 2023018690 號
工商網監
湘ICP備 2023018690 號
評論