可穿戴外骨骼是一種由外骨骼模樣的框架組成,且可讓人穿上的機器,它涉及生物運動學、機器人學、信息科學、人工智能等跨科學知識,這個裝備可以提供額外能量來供四肢,協助人體完成靠自然力量無法完成的動作。
2016-02-15 09:50:50 2661
2661 可穿戴外骨骼機器人技術的研發始于美國麻省理工學院(MIT)的「高效益機器人架構與電機系統(highly efficient robotic mechanisms
2017-02-07 10:51:069099 機器人技術不再是未來的幻想,它已經進入了我們的日常生活。但在這一領域,我們缺乏相應的法律法規。比如無人機,現在由美國聯邦航空管理局( FAA)來管理,但很多人認為,這完全越權了;比如機器人
2015-01-13 16:39:57
PID控制的優點有哪些?機器人控制技術有哪些重要性?
2021-06-18 08:02:56
機器人運動控制技術,盡管運動控制器需求增長迅速,但即便到明年,整體市場規模仍不到 10 億元。高性能工業機器人作為核心裝備,一直被國外品牌壟斷,而運動控制器的自主可控一直是國產機器人領域的一大痛點
2021-07-28 07:33:29
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
及應用機器人技術基礎(熊有倫)(此書比較早) 2.運動規劃書籍:Principles of Robot Motion Theory, Algorithms
2019-05-22 06:53:10
。.??有些品質是機器人應該遵循的,它應該有一個大腦(存儲器或控制器)它應該有一個 ARM。(顯然是用來裝東西的)它應該有一個運動的驅動機制。(像自由度,運動和其他)它應該有一個末端執行器。(手指狀
2022-03-31 10:31:31
1、機器人的控制系統“控制”的目的是使被控對象產生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教
2021-09-13 08:40:55
`機器人的主要技術參數 機器人的技術參數反映了機器人可勝任的工作、具有的最高操作性能等情況,是設計、應用機器人必須考慮的問題。機器人的主要技術參數有自由度、分辨率、工作空間、工作速度、工作載荷等
2017-08-15 14:00:52
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
第二章 機器人系統與控制需求簡介2.1 工業機器人的系統組成機械本體:精密減速機、伺服電機、伺服驅動器、控制系統(核心零部件)控制柜示教盒2.2 機器人本體結構與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
運動,然后我用Python編程畫個圖,想輸出這個圖形每一段路線的向量,然后可以設置運動時間來控制機器人運動的距離就是我怎么用labview去調用這個Python呢
2022-11-18 16:21:25
隨著機器人的轉動而改變方向,這就需要步進電機芯片進行精準的控制。此外,兒童陪護機器人中的手臂也需要步進電機芯片的支持,以實現手臂的精準運動控制。
步進電機芯片還應具有良好的穩定性和可靠性,以確保兒童陪護
2023-05-11 15:12:45
狀態方程2 控制器設計:(pure pursuit)純軌跡算法3程序源碼(Matlab)3.1 分為幾個步驟3.2 代碼3.3 效果1 差速機器人運動模型1.1 運動學分析建模運動特性為兩輪差速驅動,其底部
2021-09-01 08:11:00
HCTL-2020 解碼器及其在多關節機器人運動控制中的應用編碼器位置檢測通道的擴展是多軸運動控制系統開發中經常遇到的技術問題。該文詳細介紹了HCTL -2020 解碼器的工作原理,設計了它與DSP
2009-12-17 16:12:31
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
本書系統地介紹了工業機器人的基本組成、機械機構、運動學及動力學、控制系統、編程與調試、典型應用、管理與維護等內容。全書共7章,第1章介紹了工業機器人的發展與應用、機器人的組成與分類;第2章介紹了工業
2022-10-16 21:21:57
項目名稱:基于外骨骼的仿生機器人控制系統試用計劃:1.申請理由本人為電子在專業在校學生,以智能機器人為研究方向,參加了許多區級國家級比賽并獲獎,想要借助發燒友的智能語音開發板進行深入的學習和探索,并
2020-02-25 16:01:04
項目名稱:外骨骼助行器試用計劃:公司目前開展外骨骼助行器等項目的研發。作為核心技術之一,電機及電機驅動技術在整個項目的開發中占有非常重要的地位。同時,本公司還在開展其他電機驅動器的研發,比如,一個驅動器同時驅動2臺電機。為了加快對BLDC驅動器總體方案的設計,現申請MAX29956評估套件。
2019-09-19 09:49:22
項目名稱:機器人運動控制板(電機控制)項目試用計劃:本人目前從事機器人嵌入式軟件開發,專注于電機控制,實現電機運動控制算法,由于公司機器人運動邏輯越來越復雜,包含多個運動電機(步進伺服、伺服),目前
2018-01-22 10:32:40
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
清潔機器人是服務機器人的一種,所謂服務機器人是指自主或半自主的、從事非生產活動、能完成有益于人類健康的服務工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術、人工智能等諸多
2019-09-05 06:56:37
申請了專利。該專利的要點是借助伺服技術控制機器人的關節,利用人手對機器人進行動作示教,機器人能實現動作的記錄和再現。這就是所謂的示教再現機器人。現有的機器人差不多都采用這種控制方式。1959年第一臺工業
2015-01-19 10:58:38
,運動學部分從坐標變換人手,介紹了正向運動學方程的建立、逆向運動學的求解以及機器人的微分運動等內容。控制結構篇著重介紹機器人的傳感技術、位置控制和力控制。針對機器人控制領域的研究動態和主要研究方向,先進控制篇介紹了傳感信息融合、視覺控制、協調控制、移動機器人技術、智能控制方法等。
2017-09-19 15:30:57
全向輪機器人是如何進行直線運動的?
2021-10-29 07:09:14
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-07-05 07:08:47
機器人是先進的機電一體化數字化裝備,集機械、電子、控制、計算機、傳感器、人工智能等多學科高新技術于一體,技術附加值很高。對提高產品的質量與產量、保障人身安全,改善勞動環境,減輕勞動強度,提高勞動生產率
2015-09-02 14:03:18
研究的前沿,它在一定程度上代表了一個國家的高科技發展水平。運動控制系統是機器人控制技術的核心,也是機器人研究領域的關鍵技術之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構都把對機器人運動控制系統的研究作為首要任務。
2020-08-19 06:57:09
研究了一種用FPGA技術實現三輪全方位移動機器人運動控制系統的方法,與雙DSP結構,DSP+CPLD結構,以及DSP+專用集成電路結構等相比,該方法具有簡單可靠,擴展性強等特點。且FPGA設計簡單,使用方便,開發周期短,能夠實現真正的SOPC系統。
2019-10-22 07:35:19
工業生產中,傳統的工業機器人在生產適用性上已經不能滿足日益增長的多任務需求,多軸機器人順勢發展,趨勢明顯。多軸機器人是能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系
2020-07-29 06:57:04
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發智能機器人控制系統?
2021-12-23 06:55:02
各位大神,現在小弟想用LabVIEW控制安川機器人,可是通過調用motocom32的DLL不能和機器人通信,聽說LabVIEW不能二次開發安川機器人,請問有熟悉安川機器人的高手指點一二,不勝感激!
2014-11-10 12:29:06
?舉例: 工業機器人系統由三大部分六個子系統組成,1、三大部分是:(1)機械部分(2)傳感部分(3)控制部分2、六個系統(1)驅動系統,要使用機器人的運行起來,就需給各個關節即每個運動自由度安置
2016-03-06 12:56:19
席文姣,陳帝伊,馬孝義(西北農林科技大學 水利與建筑工程學院,陜西 西安712100)0引言如何設計智能滅火機器人控制器?控制器是智能機器人處理和控制信息的主體,它直接決定了機器人的行為和性能
2019-07-31 06:23:18
`<span style="" >工業機器人的技術原理機器人是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而
2018-11-23 10:40:38
依賴進口。目前國內伺服電機領域的領先企業包括匯川技術、廣州數控、華中數控(300161,診股)、埃斯頓等。控制器控制器是機器人的大腦,主要負責發布和傳遞動作指令。控制器的主要任務是對機器人的正向運動
2017-08-23 15:10:27
機器人技術是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的領域。機器人應用情況,是一個國家工業自動化水平的重要標志。
2020-03-27 09:03:30
工業機器人一般由主構架(手臂)、手腕、驅動系統、測量系統、控制器及傳感器等組成。 1圖是工業機器人的典型結構。機器人手臂具有3個自由度(運動坐標軸),機器人作業空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
必須考慮的問題。機器人的主要技術參數有自由度、分辨率、工作空間、工作速度、工作載荷等。1、自由度機器人具有的獨立坐標軸運動的數目。 機器人的自由度是指確定機器人手部在空間的位置和姿態時所需要的獨立運動
2018-10-12 10:16:22
怎么實現對機甲大師機器人的控制?
2021-11-19 06:33:45
如何去驗證電機的運動性能?怎樣去設計一種基于STM32F407ZGT6芯片控制板機器人的運動控制系統?
2021-06-29 08:34:12
具有基于虛擬現實的運動跟蹤功能的上臂外骨骼的設計和分析摘要:機器人康復是治療腿部或肢體受傷的患者的新療法。患者的第二個選擇是使用機器人康復,而不是傳統的康復,因為機器人康復消耗更少的錢和更短的時間
2021-09-01 06:10:43
技術在各個精密行業得到廣泛應用,使得現在許多的高精密件的誤差可以控制在微米的范圍內;另一方面是送料的精密度。因此數控機床機器人生產的沖壓件質量更高更穩定!質量可以保證的。
2018-11-22 12:00:57
,體積小同樣是機器人上傳感器的要求,對于安裝在機器人手臂等運動部件上的傳感器,重量一定要輕,否則會加大運動部件的損壞,影響機器人的運動性能。對于工作空間受到某種限制的機器人,對體積和安裝方向的要求也是
2015-01-20 14:56:46
有什么機器人技術的資料?單片機開發的.
2011-06-21 10:42:25
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-06-30 06:37:34
機械外骨骼傳感器采用壓力傳感設計,這樣的好處是:1、關節運動部件功率和速度可調節;2、機械和人體的運動跟隨性更好;3、電機的功率可以最大化的輸出,同時可控制;
2016-04-27 23:51:57
機器人前沿--下肢外骨骼機器人
2019-04-28 06:56:09
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
外骨骼壓力傳感器測試2
2016-05-06 01:15:00
的進步,直接精神控制的外骨骼被廣泛使用只是時間問題。(圖片來源:EksoBionics)5.靶向治療微型機器人雖然是相對較新型的醫療機器人,但卻是非常有前途的。它們工作的基礎是使用近微觀機械粒子將藥物
2018-10-19 22:28:29
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
我國自主研發的外骨骼機器人FourierX1近期在滬正式對外發布。這是中國真正意義上的首款商用化的外骨骼機器人,在國內實現了該領域零的突破,將讓下肢癱瘓或偏癱患者能夠借助輔具實現有尊嚴的行走。預計FourierX1價格將僅為國外同類產品的三分之一至五分之一。
2017-03-25 11:30:252390 機器人外骨骼通常用于康復治療中,它是一種可以像穿衣服一樣穿在身體上的智能機器人,幫助穿戴者跑得更快、力氣更大、耐力更強。
2017-10-15 11:09:211096 運動自適應外骨骼機器人系統的主要功能是為腦卒中患者提供上肢關節協同運動康 復訓練,主要是通過與患者建立的空間物理聯接以物理交互和感知交互的方式實現。外骨骼機器人系統和人體緊密聯接,相互作用,相互影響
2017-10-17 14:45:01 15
15 除了軍用,外骨骼機器人開始在商業上也有了發展。日本筑波大學的機械人專家三階吉行和他的同事們在2004年創建了一個叫做“Cyberdyne”的公司,開始把他們花了十年時間研制的動力外骨骼機器人推向市場
2017-11-14 14:52:0510268 外骨骼機器人可用作于康復治療。外骨骼機器人可以用于輔助殘疾人、老年人以及上肢、下肢無力患者、癱瘓病人等。有了外骨骼機器人,四肢癱瘓的病人都有可能重新站立起來自主行走。
2018-06-27 15:30:001925 近日,在成都召開的第一屆全國醫用機器人和醫學智能化大會上,一套由我國自主研發的外骨骼機器人在成都亮相,驚艷全場。據悉,這套可穿戴外骨骼機器人裝備,可根據人的行為意圖來控制機器人系統,具有實現
2018-01-19 09:38:333349 對于脊髓損傷和腦卒中(中風)患者來說,站立行走似乎是一個可望而不可及的夢想,而外骨骼機器人的誕生,將使這一夢想變為現實。所謂外骨骼機器人,通俗來說就是“套在人體外面”的機器人,它是基于仿生學和人體
2018-07-08 16:10:006487 據新華社報道,近日,電子科技大學機器人研究中心執行主任程洪團隊研發出第四代外骨骼機器人,幫助脊髓損傷的截癱患者像正常人一樣站立行走。
2018-08-20 16:49:005203 近日,電子科技大學機器人研究中心研發出第四代外骨骼機器人,幫助脊髓損傷的截癱患者像正常人一樣站立行走。
2018-08-21 16:52:084737 中國科學院深圳先進技術研究院智能仿生研究中心執行主任吳新宇告訴記者,外骨骼機器人是集機械、電子、計算機、人工智能等技術于一身的復雜智能系統,人們把特制的“骨骼”穿在身上,安裝在膝蓋和髖關節等位置的傳感器可以讀取人體運動意圖,給驅動系統發出指令帶動腿部運動,從而實現行走。
2018-12-17 08:49:193219 外骨骼機器人通過幫助無法行走的人重獲行走能力,實現了醫療行業的變革,它們還可以協助人們移動和舉起物體,減少了工傷的發生。亞洲的兩個國家引領著外骨骼機器人的發展,分別是:中國和日本。這兩個國家的外骨骼機器人產業發展如何?亞洲兩大經濟體的技術區別是什么?
2019-01-14 10:51:303218 今年上半年,兩部科幻影片《流浪地球》和《阿麗塔》相繼被熱議。《流浪地球》中的救援隊員們身著外骨骼機甲,在惡劣的地表為生存而奮戰;《阿麗塔》中,機器能替代人類失去的肢體,使身體機能大幅提升。在現實生活中,也有人正在利用外骨骼,使失去行走能力、運動能力的人,重新恢復站立甚至行走的希望。
2019-08-15 16:08:115776 現有的外骨骼康復機器人,按照針對軀體的部位可分為:上肢機器人,下肢機器人;按照功能劃分可分為康復訓練機器人和輔助行走機器人。
2019-08-28 09:51:113024 外骨骼機器人的研究可以追溯到 20 世紀 60 年代,最初的研究目的主要是用于提高士兵的背負承載能力,隨著機器人技術和生物檢測技術的不斷發展,外骨骼機器人的研究取得了飛躍性突破。基于不同作用對象
2019-09-23 08:00:002 機器人產業正在快速發展,我們可以看到,不僅是制造業,機器人外骨骼的研制還將為更多行業提供裝備支持。
2020-01-13 14:30:351834 電影《流浪地球》中,通過控制機器人外骨骼,救援隊在冰原中拖動火石、救助墜落的人員、最后協力推動"頂針",賺足了觀眾的眼球。
2020-03-28 16:38:133059 機器人技術是融合傳感、控制、信息、融合、移動計算,為作為操作者的人提供一種可穿戴的機械機構的綜合技術。本文簡要介紹了軍事領域外骨骼世界機器人技術的發展現狀與趨勢。是指套在人體外面的機器人,也稱可穿戴的機器人
2020-10-21 15:28:183163 隨著機器人產業的整體發展,機器人產品體系愈發完善,應用也更趨多元化。在這一背景下,機器人各細分領域的發展不斷提速,在工業、醫療等場景中取得了新的突破。近日,外骨骼機器人企業傲鯊智能宣布完成數千萬人民幣Pre-A輪融資,體現出外骨骼機器人這一行業的快速崛起。
2020-11-02 14:23:36833 11月30日,在位于北京經濟技術開發區的一家康復中心,患者使用外骨骼康復訓練機器人進行康復訓練。 外骨骼康復訓練機器人通過運用仿人機器人技術與康復醫學相結合,為截癱、偏癱、腦癱及老年人等失去站立
2020-12-17 18:16:202909 操控機器人是很多人的夢想,不過這次夢想或許能成真了。日本機器外骨骼制作公司 Skeletonics 發布一款擴張人體功能的外骨骼型機械人"Skeletonics Arrive",使用者可透過四肢移動直接操控機器手臂與機器腿,可做出自由度高的身體動作。
2020-12-25 22:16:20619 近幾年,隨著外骨骼機器人的發展,其在醫療、物流等行業已有實際應用案例,而包括科大訊飛、中國科學技術大學先進技術研究院等在內的企業、研究機構等都在致力于外骨骼機器人的研制。
2021-03-19 16:32:08823 本月初,加拿大滑鐵盧大學的研究人員更新了第一個開源的人類運動場景高分辨率可穿戴相機圖像數據庫。在此基礎上,可使用AI和可穿戴相機,讓外骨骼機器人實現自主行走。 外骨骼機器人是指套在人體外部的機器人
2021-04-15 17:18:543138 基于TI處理器的外骨骼輔助康復機器人
2021-06-25 10:28:3715 近年來,機械外骨骼機器人總是會吸引大家的目光,首先經常在科幻片中看到外骨骼機器人,比如異形、極樂世界、阿凡達等經典電影。在真實應用中,有軍用、工業制造和醫療康復類的外骨骼輔助機器人,但都避免不了笨重
2022-04-07 10:13:45938 雙足的外骨骼機器人怎么又可以像帶輪子的車一樣向前運行呢,同時又可以像雙足機器人一樣上樓梯?看看這個雙足外骨骼輪式機器人就明白了。 在平路上,該外骨骼機器人是通過驅動輪滾動式的前行,前面2個小輪子作為
2022-04-08 09:42:525948 
主要由機械骨架、控制中樞、驅動系統三大核心部件構成。在專注于外骨骼機器人領域10年之久的程天科技合伙人兼COO張繼宇看來,公司每次的研發與創新都有一個“柔軟”的夢想,“如果你有一天看到一個十年都沒有站起來的人,在外骨骼
2022-06-17 19:52:591388 
邁步下肢外骨骼康復訓練機器人BEAR-H1是一款輔助腦卒中患者用于步態康復訓練的新型可穿戴式下肢外骨骼機器人。憑借出色的設計和創新的概念,該產品榮獲2018年德國紅點概念設計大獎。
2023-08-30 14:17:44414 過去,對于許多殘障人士來說,一輩子只能依靠輪椅。現在,外骨骼機器人的出現,改變了下肢癱瘓、行動不便的人幾乎無法行走的困境。
2023-08-30 14:21:03290 等目的,其本質是一類可實現人機結合的可穿戴式機器人。 在仿生原理、人體工程學設計以及信息控制技術等基礎上,外骨骼機器人還涉及生物運動學、機器人學、信息科學、人工智能等學科知識,專業類涉及機械,電子自動化,計
2023-08-30 16:16:44711 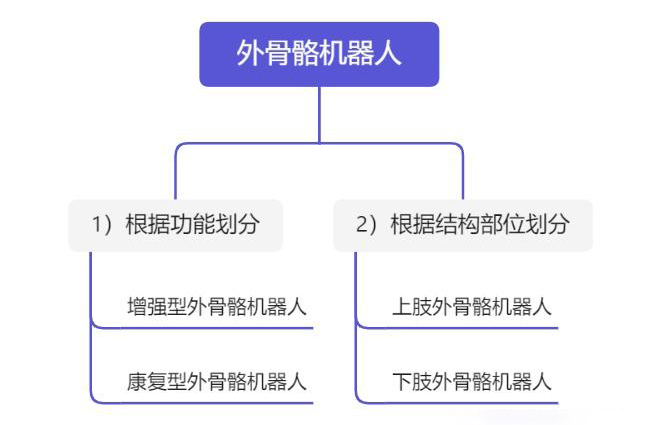
資本對外骨骼機器人關注度有望大大提升:根據CB Insights數據,2016年至今,外骨骼機器人產業融資將近百次交易,融資總規模億美元級別,比較與外骨骼機器人有相似性和重合度的三個產業,醫療設備、機器人及智能可穿戴設備,融資規模均超十億美元。
2023-08-30 16:18:45574 
外骨骼機器人之技術 外骨骼機器人技術是融合傳感、控制、信息、融合、移動計算,為作為操作者的人提供一種可穿戴的機械機構的綜合技術。 外骨骼機器人是一種可以穿戴在人體表面,能夠提供額外動力和能力的機器人
2023-09-12 16:13:57278 一、外骨骼機器人的發展與場景 外骨骼的定義最早其實來源于動物,即外部的骨骼,這些外部骨骼一般用于支撐和保護動物,與之相反的是人類這樣“內骨骼”的生物。因此,外骨骼機器人一般是指那些能夠保護自身
2023-09-14 11:37:07391 及人機交互技術,推動創新型康復外骨骼機器人廣泛應用,提高肢體殘疾人士生活質量的企業——邁步機器人。 △技術討論集錦 自成立起,邁步機器人便堅持“用科學技術改善康復醫療”的企業使命,團隊成員攻堅克難,秉承創新精
2023-09-18 16:00:22188 
以夢為馬,用科技的力量點亮患者的“康復夢”。科技賦能,讓外骨骼機器人給患者插上康復的翅膀。
2023-09-20 17:47:42557 
目前就外骨骼機器人的市場上來看,因為工業市場和工業機器人等成熟產品都存在競爭,外骨骼機器人最有可能的市場依然在醫療場景。
2023-09-20 17:54:09507 
外骨骼機器人技術具有廣泛的應用前景和重要的研究價值。我們有理由相信,在不遠的將來,外骨骼機器人會向著民用的方向蓬勃發展,走進千家萬戶。
2023-09-20 18:00:49412 
如何?接下來將一一為大家解答。△圖片源自邁步機器人一、外骨骼機器人如何帶動人行走?這里,我們要先了解什么是外骨骼機器人技術,百度百科釋義如下:外骨骼機器人技術是融合傳感、
2023-09-21 10:01:58698 
等目的,其本質是一類可實現人機結合的可穿戴式機器人。在仿生原理、人體工程學設計以及信息控制技術等基礎上,外骨骼機器人還涉及生物運動學、機器人學、信息科學、人工智能等
2023-09-21 10:07:16733 
外骨骼機器人技術是融合傳感、控制、信息、融合、移動計算,為作為操作者的人提供一種可穿戴的機械機構的綜合技術。它能夠通過傳感器、電腦算法和動力學裝置來輔助、增強甚至取代人體的運動能力。這項技術
2023-09-21 10:11:32523 
毋庸置疑,目前我國的外骨骼機器人還處于技術迭代和升級階段,但國家政策的支持為外骨骼機器人提供了良好的環境,行業正不斷加速發展。醫療康復外骨骼機器人站在“康復器械”、“人工智能”、“機器人"等交叉領域風口上,享受多重利好。
2023-10-11 16:13:50367 
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論