步進電機基本上以開環電路驅動,用于位置控制 。換句話說,步進電機以外的電機尤其是高精度的步進電機之外并沒有做開環控制定位的,而用開環電路驅動的電機只有步進電機。
2023-09-22 10:37:59 680
680 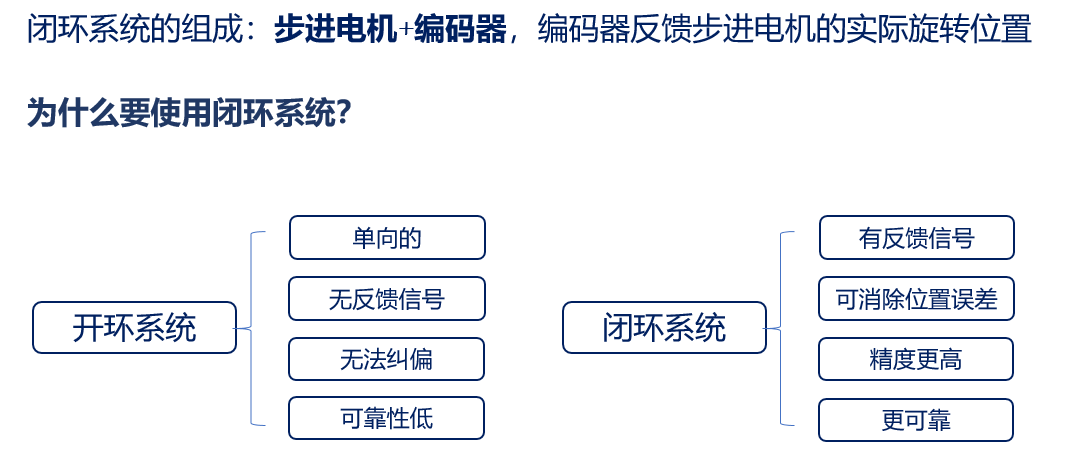
但隨著伺服閉環控制在高速度,高響應,高精度這“三高”上表現越來越出色,步進電機也開始往閉環控制上發展。越來越多廠商推出一體化閉環電機,填補開環的步進電機和高性能伺服電機中間階段的空白。當然有人說步進
2021-09-10 09:44:467564 越來越多廠商推出一體化閉環電機,填補開環的步進電機和高性能伺服電機中間階段的空白。步進電機做閉環,這是以前不敢想象的。同時如何解決丟步與過沖的問題,也是步進電機驅控能力的體現。現在的步進電機,都有了閉環精確的定位與流暢的運動曲線,這些步進電機背后強大的電機驅動器又是怎樣的。
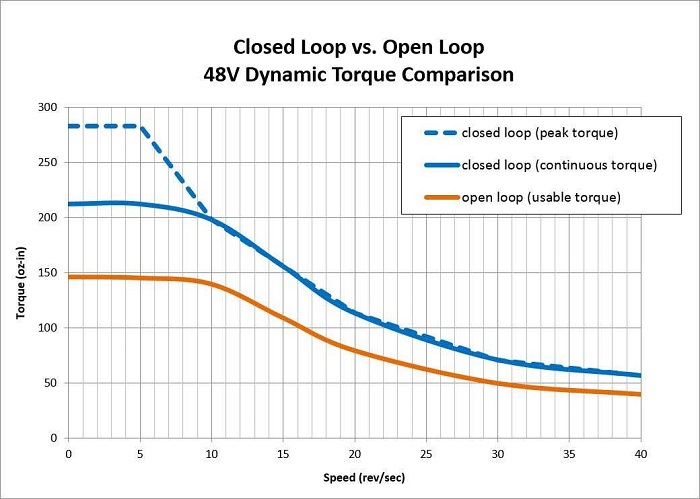
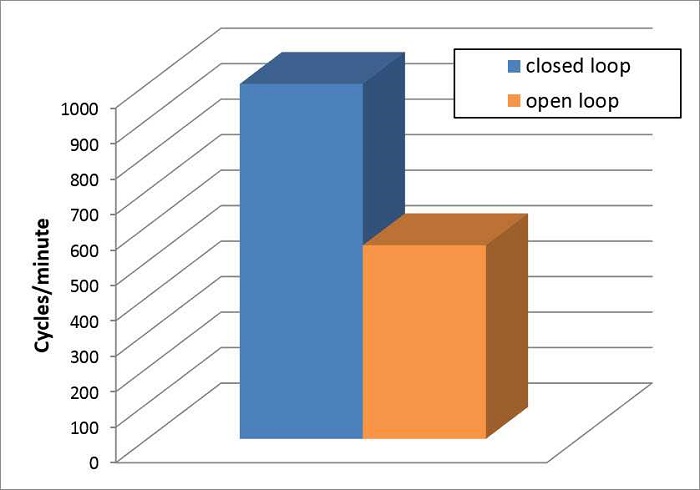
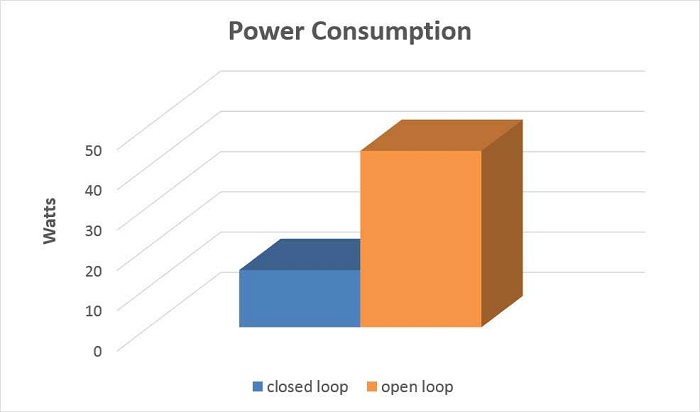
2022-02-08 08:00:002478 系統與傳統開環步進電機系統的對比。 實驗測試比較了兩個系統的加速度(轉矩),效率(功耗),位置誤差(精度),發熱量和噪聲水平,結果表明,閉環步進電機系統的性能優于開環設置。僅考慮扭矩和加速度之間的關系
2023-03-10 10:06:16
`步進電機的閉環控制最主要就是可靠性,開環有失步的風險,失步后控制系統不知道,照常發脈沖,其實機器已經失控。閉環后不會有失步現象,如果碰到沖擊力矩大的,造成無法繼續運轉,電機會以最大力矩頂住障礙物
2018-09-05 11:02:31
步進電機由于體積精巧、價格低廉、運行穩定,在低端行業應用廣泛,步進電機運動控制實現全閉環,是工控行業的一大難題。主要問題有兩個,原點的不確定性和失步,目前,采用高速光電開關作為步進系統的原點,這個
2019-06-24 07:43:27
**步進電機開環控制步進電機開環伺服系統的一般構成步進電動機的電樞通斷電次數和各相通電順序決定了輸出角位移和運動方向,控制脈沖分配頻率可實現步進電動機的速度控制。因此,步進電機控制系統一般采用開環
2021-07-07 06:56:09
步進電機控制系統設計一個開環步進電機控制系統。使得步進電機能夠正常運轉。并能實現啟停、正反轉、調速控制。以及顯示速度。2.設計要求如下:①硬件測試通過。接線完成。三個芯片分別測試通過。步進電機
2021-06-29 06:48:40
目錄步進電機梯形加減速梯形加減速算法原理分析算法實現步進電機梯形加減速電機的控制方式一般分為開環控制與閉環控制兩種控制方式,其中開環控制原理框圖如下:這種種控制方式的特點是:控制簡單、實現容易、價格
2021-07-07 07:53:48
步進電機的開環控制分析
2021-01-22 06:57:59
前言 上一講我們已成功實現基于STM32定時器的步進電機開環速度控制,這一節將介紹步時電機的開環電流控制,步進電機內阻較大,在電機停機或堵轉時其電流可近視為 I = U/R。其中R是常量,控制U
2021-07-08 07:37:53
》這本書,進行的學習過程中的知識記錄和心得體會的記錄。5.6 閉環控制??步進電機基本上以開環電路驅動,用于位置控制。換句話說,步進電機以外的電機尤其是高精度的步進電機之外并沒有做開環控制定位的,而用開環電路驅動的電機只有步進電機。例如無刷電機,首先為切換相,
2021-07-07 06:18:52
三、步進電機的控制步進電機的控制從控制形式上看,有開環控制和閉環控制。開環控制步進電機系統的主要特點是能實現精確位移、精確定位,且無積累誤差。這是因為步進電機的運動受輸入脈沖控制,其位移是斷續的,總
2021-07-08 06:44:25
的RA0、RAI、RA2控制步進電動機的三相。步進電動機的控制方式一般分為開環控制與閉環控制兩種控制方式,其中開環控制步進電機最簡單的控制方式就是玎環控制系統,在這種控制方式下,步進電機控制脈沖的輸入并不
2018-10-16 18:17:33
開環控制是什么?閉環控制又是什么?二者有何區別?
2021-09-06 07:22:03
市場上常見3D打印機電機選用的是開環步進電機,出于成本、體積、控制算法實現難以程度,開環步進電機可以達到acceptable的控制效果。伺服電機是被現在的工程師們所推崇和津津樂道的,提到運動控制不談
2021-06-27 06:38:44
市場上常見3D打印機電機選用的是開環步進電機,出于成本、體積、控制算法實現難以程度,開環步進電機可以達到acceptable的控制效果。伺服電機是被現在的工程師們所推崇和津津樂道的,提到運動控制不談
2021-06-28 07:50:24
伺服電機具有哪些缺陷?閉環步進電機與伺服電機對比分析哪個好?
2021-09-27 08:13:44
伺服電機有哪些缺陷?閉環步進電機有哪些優點?
2021-09-28 08:45:48
什么是混合伺服?閉環步進電機的基本特性有哪些?
2021-10-09 06:09:11
的解決方案。實際上,步進系統是唯一的一個不需反饋就具備位置控制能力的運動技術,但是當步進電機以開環方式驅動負載時,在指令步和實際步之間存在失去同步的潛在可能性。?閉環控制指被控的輸出以一定方式返回到作為控制
2022-11-12 11:24:12
CAN總線步進伺服一體機閉環步進電機具有哪些特點及優點?
2021-10-12 08:37:07
用于步進伺服的即插即用智能步進電機系統CAN總線步進伺服一體機閉環步進電機Trinamic的PD-1378 PANdrive智能步進電機系統結合了強大的步進電機和閉環驅控操作,具有更高的精度、可靠性
2021-06-28 10:00:00
《5大運放電路設計教程 帶你吃透模電技術》第一部第二小節第一講:運放開環缺點及閉環優點在運放開環部分,運放可以用作比較器。可加入正反饋形成滯回比較器,還學習了NE555電路,LT431等。下面為運放
2019-07-04 14:58:06
給所使用的電機裝置設速度檢出器(PG),將實際轉速反饋給控制裝置進行控制的,稱為“閉環 ”,不用PG運轉的就叫作“開環”。通用變頻器多為開環方式,也有的機種利用選件可進行PG反饋。無速度傳感器閉環控制方式是根據建立的數學模型根據磁通推算電機的實際速度,相當于用一個虛擬的速度傳感器形成閉環控制。
2021-04-30 09:03:48
,它的精確度就越高,伺服電機取塊于自帶的編碼器,編碼器的刻度越多,精度就越高。2.控制方式不同一個是開環控制,一個是閉環控制。3. 低頻特性不同步進電機在低速時易出現低頻振動現象,當它工作在低速時一般
2017-07-13 13:18:49
Trinamic的PD-1378 PANdrive智能步進電機系統結合了強大的步進電機和閉環驅控操作,具有更高的精度、可靠性、效率和安全性。漢堡,2020年2月17日-TRINAMIC運動控制
2021-06-28 13:29:38
控制(或SVPWM控制)使用滯環電流pwm控制,因此需要在電流反饋回路加入低通濾波?也可以使用SVPWM控制,在我的另一篇文章中有提(二相混合式步進電機閉環矢量控制simulink仿真(含仿真文件
2020-06-14 22:33:19
1.開環進給伺服系統 開環進給伺服系統是數控機床中最簡單的伺服系統,執行元件一般為步進電機,其控制原理 開環進給伺服系統的精度較低,速度也受到步進電動機性能的限制。但由于其結構簡單,易于調整
2023-03-21 17:53:51
閉環控制步進電機是控制論的一個基本概念。指作為被控的輸出以一定方式返回到作為控制的輸入端,并對輸入端施加控制影響的一種控制關系。步進電動機的閉環控制是采用位置反饋和 速度反饋來確定與轉子位置相適應
2018-08-30 10:41:23
DM330022,dsPICDEM MCSM開發板旨在以開環或閉環(電流控制)模式控制單極和雙極步進電機。硬件的設計使得無論是雙極還是單極配置的8,6或4線步進電機都不需要進行硬件更改。提供了在完全
2019-07-01 12:35:06
伺服電機的缺點有哪些?閉環步進電機的優點有哪些?伺服電機和閉環步進電機有哪些不同之處?
2021-09-27 07:58:29
開閉環 Open closed loop——————關于伺服電機和步進電機的部分原理差異步進電機與伺服電機的本質都是通過驅動器控制電機,但是在控制原理上有不同之處。Step and servo
2021-06-28 07:10:10
對步進電機進行閉環控制,做了位置反饋環后還有必要做速度環嗎?
2016-03-28 11:00:51
基于89C51單片機對步進電機進行控制,重點描述了步進電機的控制器,驅動電路和方法和LED顯示電路的設計,實現了對步進電機的開環控制
2016-01-22 14:50:39
基于單片機的步進電機開環控制PCB打樣找華強 http://www.hqpcb.com/3 樣板2天出貨
2012-10-22 22:23:07
基于單片機的步進電機開環控制系統
2012-08-08 00:18:34
基于單片機的步進電機開環控制系統摘要: 通過ATMEL89C51單片機對步進電機進行控制,主要介紹了步進電機控制器、驅動電路和LED顯示電路的設計,實現了步進電機的開環控制。在步進電機控制器的設計中
2009-08-26 15:03:12
如何設計一個開環步進電機控制系統?
2021-10-15 06:43:25
■ 前言在 42HS48EIS步進閉環電機最大轉速 中給出了一款帶有驅動器的步進電機的測量結果。為了進一步減少實驗室機械臂設計重量,購置了更小的一款電機進行測。▲ 實驗電機的外觀以及旋轉光電編碼器
2021-07-07 08:04:16
一、開環、半閉環、閉環控制方式的區別?開環:發出指令后,不再管了,執行到位沒有,不再過問。半閉環:發出指令后,只檢測電機運轉情況,不管最終執行元件是否到位。全閉環:發出指令后,檢測最終執行元件是否
2021-07-05 08:03:59
拓達伺服步進電機是步進電機的位置閉環控制,那不用說了一定是位置環,控制量是長度(位移)。這是因為位置控制的閉環控制策略可以大致根據控制量分三種:1.位置環,就是用位移量來做閉環控制。2.速度環,就是
2018-08-25 10:05:53
,可以簡單的位置控制(低速)使用定時器中斷,基數脈沖個數。可以對步進電機做梯形或者S形的加速控制。優點:可以降低步進電機的開環丟步,但是頻繁中斷。關于步進伺服電機1:單脈沖法 :參考步進電機2:門控方式:用主從定時器門控方式,比較繁瑣;3:高級定時器T1、T8的重復計數方式 高級定時器有一個8位
2021-06-28 08:07:43
技術,對輸出增益和零安培輸出電壓進行片上補償。這些參數通過在Allegro工廠生產線末端測試中進行編程,并通過在IC上集成EEPROM、溫度傳感器和數字分段線性溫度補償算法得以完美呈現。如何在開環和閉環
2019-06-24 05:00:52
閉環系統的開環傳遞函數可以用來判斷閉環系統的穩定性,也就是奈奎斯特穩定性判據。第一種說法:如果開環傳遞函數穩定(S復平面不存在右極點),若頻率特性圖不包圍(-1,j0)點,那么閉環系統穩定,否則閉環
2012-09-05 17:04:34
類型。具體內容是指: 把控制系統輸出量的一部分或全部,通過一定方法和裝置反送回系統的輸入端,然后將反饋信息與原輸入信息進行比較,再將比較的結果施加于系統進行控制,避免系統偏離預定目標。閉環步進電機控制系統利用的是負反饋。 即是由信號正向通路和反饋通路構成閉合回路的自動控制系統,又稱反饋控制系統。
2019-09-27 18:02:18
如何對電機開環系統進行調試?如何對電機閉環系統進行調試?
2021-06-30 07:10:55
這里所說的“開環”指的是“I/f”控制,閉環即“速度-電流雙閉環”。很多論文中都提到了加權過渡的思路,比如參考論文中的描述如下圖所示,使用角度信號加權的方式來實現開環到閉環的過渡。實驗結果
2021-08-27 06:40:25
針尖對麥芒,閉環步進電機對于伺服電機的優勢?伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服電機轉子轉速受輸入信號控制,并能快速反應,在自動控制系統中,用作
2015-12-29 15:21:11
基于單片機的步進電機開環控制系統:通過ATMEL89C51單片機對步進電機進行控制,主要介紹了步進電機控制器、驅動電路和LED顯示電路的設計,實現了步進電機的開環控制。在步進電機
2009-08-25 18:27:01 102
102 閉環 控 制 中的反饋檢測采用電流波形檢測方式。通過檢測電機繞組的電壓和電流的波動,產生和機械位置相對應的脈沖作為反饋信號控制步進電機。步進電機工作時,不論導通還
2010-01-12 17:19:16126 電壓比較器VIO的開環測試
輸入失調電壓(VIO)是電壓比較器(以下簡稱比較器)一個重要的電性能參數,GB/T 6798-1996中,將其定義為“使輸出電壓為規定
2010-01-15 17:57:471790 步進電機和交流伺服電機性能比較
步進電機和交流伺服電機性能比較 步進電機是一種離散運動的裝置,它和現代數字控制技術有著本質的聯系。在目前國內的數字
2010-02-06 10:25:44933 單片機的步進電機開環控制系統
0 概述
步進電機是一種將電脈沖信號變換成相應的角位移或直線位移的機電執行元件。控制步進電機的輸入
2010-04-12 11:59:381658 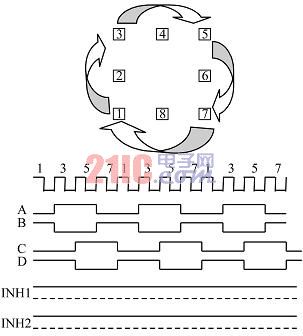
步進電機由于體積精巧、價格低廉、運行穩定,在低端行業應用廣泛,步進電機運動控制實現全閉環,是工控行業的一大難題。
2012-01-06 15:22:1114427 
基于單片機的步進電機開環控制系統,下來看看
2016-04-25 17:07:5312 基于單片機的步進電機開環控制系統基于單片機的步進電機開環控制系統
2021-11-30 11:55:5827 泰德- 01370是一款具有以下用途的TI設計:在存在通過光學旋轉增量編碼器獲取的閉環反饋的情況下,在由DRV8880驅動的步進電機中進行失速檢測。該參考設計顯示如何使用閉環算法檢測失速。 步進電機
2017-05-03 10:10:0342 步進電機伺服系統是典型的開環控制系統,指令信號是單向流動的。開環系統沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統簡單可靠,不需要像閉環伺服系統那樣進行復雜的設計計算與試驗驗證。
2017-06-12 15:32:5815223 
中沒有加入負反饋電路時的放大增益,加入負反饋后的增益稱為閉環增益。由于負反饋降低了放大器的放大能力,所以在同一系統中,閉環增益一定小于開環增益。在自動控制系統中,開環增益是指將開環傳遞函數寫為標準形式后,對應的開環傳遞函數增益。
2017-11-24 17:01:2199434 
NiMotion一體化閉環步進電機融合了步進電機和伺服電機各自的技術優點。NiMotion一體化閉環步進電機比標準步進電機運行更安靜,振動更少,同時又能實現位置反饋的閉環控制,校正時間短,不失
2018-03-29 14:48:4810 步進電動機的控制方式一般分為開環控制與閉環控制兩種控制方式,其中開環控制步進電機最簡單的控制方式就是玎環控制系統,在這樣的控制方式下,步進電機控制脈沖的輸入并不依賴于轉子的位置,反而是按一固定的規律
2018-04-25 14:28:54106655 
步進電機失步的原因和對策 步進電機可以根據脈沖數和脈沖頻率來對電機實現開環控制位置和速度,是一種便宜、簡單好用的控制類電機,在自動化控制領域得到越來越廣泛的應用。但由于步進電機不是閉環控制,選型或者
2020-06-28 17:25:1512072 步進電機可用于簡單的開環控制系統; 這些通常適用于在靜態載荷下以低加速度運行的系統,但是閉環控制對于高加速度來說可能是必不可少的,特別是如果它們涉及可變載荷的話。如果開環控制系統中的步進電機過載,則轉子位置的所有知識都將丟失,系統必須重新初始化; 伺服電機不受此問題的困擾。
2019-07-08 09:27:404690 
本文簡述開環系統中步進電機按 線性 加、 減速及指數形加速時 , 電機由啟動須左升 至運行頻北 , 或由運行 須率降至啟動須率的數學模型和 汁算 子 , 有一定的實用 價值。
2019-11-04 08:00:000 伴隨著科學技術的不斷進步,伺服電機驅動器的控制方式也在不斷增加,有模擬量、232、 CAN控制、閉環控制、開環控制等,那么今天華科星就分別來談談閉環控制和開環控制的區別。
2021-08-02 16:21:2511894 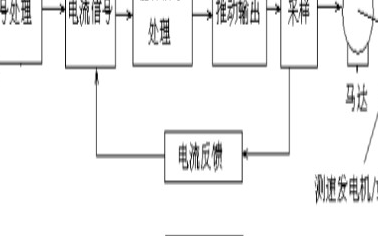
做好閉環步進電機速度控制,是保證電機有好的控制,能夠能夠呈現出好的運行效果發揮出優勢功能的重點之一。所謂的控制電機運行速度,實際上就是控制系統發出步進脈沖的頻率或者換相的周期。該系統可用兩種辦法來確定步進脈沖的周期。
2021-08-14 10:02:251456 ,是一種開環控制系統。 但隨著伺服閉環控制在高速度,高響應,高精度這“三高”上表現越來越出色,步進電機也開始往閉環控制上發展。越來越多廠商推出一體化閉環電機,填補開環的步進電機和高性能伺服電機中間階段的空白。 當然
2021-09-17 10:58:074689 0、引言實驗材料類目型號MCUN76E003步進電機42步進步進電機驅動器設置800細分電源24VTTLCH3401、程序邏輯1.1、程序采用PWM中斷,實現對PWM脈沖計數,由此實現開環控制步進
2021-12-29 19:22:255 步進電機閉環驅動器使用教程
2021-12-30 14:41:4811 電子發燒友網站提供《步進電機開環驅動板設計.zip》資料免費下載
2022-08-09 11:38:045 這些要求可以分為開環或閉環。注意不要將其與上一節中描述的開環或閉環傳感器混淆。在這里,電流測量應用本身被稱為開環或閉環。
2022-10-14 16:17:481602 在工業自動化中,步進電機的應用非常的廣泛,例如工業機器人、3D打印機、計算機硬盤等都有步進電機的身影。傳統的步進電機可以控制轉子的角度位置,而不需要傳感器來控制位置,是一種開環控制系統,在這樣的控制
2022-10-24 10:52:25862 2 相和 5 相步進電機比較
2023-03-07 16:58:202553 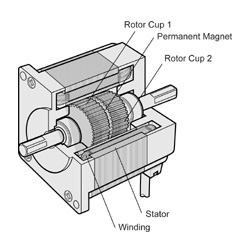
步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,步進電機的也稱為“脈沖電機”。由于步進電機無需使用位置傳感器僅通過開環控制即可實現準確的定位而被廣泛用??于需要定位的設備中。
2023-03-09 11:49:321227 
算法實現 程序流程圖 步進電機梯形加減速 電機的控制方式一般分為開環控制與閉環控制兩種控制方式,其中開環控制原理框圖如下:這種種控制方式的特點是:控制簡單、實現容易、價格較低,這種開環控制方式,負載位置
2023-03-17 15:08:376 開環電機是一種沒有反饋控制的電機,也稱為非閉環電機。其輸出轉速和位置由輸入控制信號決定,沒有位置或速度反饋回路來控制輸出。其特點是成本低、結構簡單、轉速波動大且誤差較大,適用于一些不要求精度和負載
2023-03-19 15:14:455302 五線四相步進電機驅動測試程序(2個步進電機)
2023-03-22 14:18:406 轉子位置,需要含位置傳感器的位置閉環電路。而旦如果按一定速度驅動,需測出轉子的速度,此為速度閉環電路;如果想定位控制,需要含有轉子位置信號的編碼器等傳感器的 閉環電路。與開環驅動的步進電機相比較,含傳感器的閉環
2023-03-22 09:47:362 SSD2608PC 步進電機驅動器控制 開環57兩相步進電機CanOpen通訊 測試硬件倍福CX5130+EL6751 CANOPEN主站模塊 研控步進電機驅動器 SSD2608PC(閉環式步進電機
2023-03-23 14:21:500 設計一個開環步進電機控制系統。使得步進電機能夠正常運轉。并能實現啟停、正反轉、調速控制。以及顯示速度。
設計要求如下: ①硬件測試通過。接線完成。三個芯片分別測試通過。步進電機能夠正常運轉
2023-03-23 10:56:581 步進伺服和步進電機都是一種設備,但它們的工作原理和控制方式有所不同。 步進電機是一種常見的電動機,其工作原理是通過交替通電使電機轉子按照一定的步距旋轉。步進電機通常采用開環控制方式,即根據輸入的脈沖
2023-06-13 08:30:02494 閉環步進電機的實時控制與監測。同時,基于編碼器搭建了系統精度測試平臺,測試結果表明,系統不適用于精度要求不高于0.216°的場合和小角度高精度定位的情況,而更適用于應用場合為大角度定位的情況。
2023-07-14 13:59:52992 
步進電機伺服系統是典型的開環控制系統,指令信號是單向流動的。開環系統沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統簡單可靠,不需要像閉環伺服系統那樣進行復雜的設計計算與試驗驗證。
2023-08-19 11:04:08440 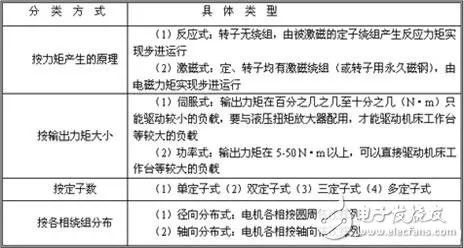
有密切的關系,步進電機控制系統從其控制方式來看,可以分為以下三類:開環控制系統、閉環控制系統、半閉環控制系統。半閉環控制系統在實際應用中一般歸類于開環或閉環系統中
2023-09-14 08:09:031313 
步進電機基本上以開環電路驅動,用于位置控制。換句話說,步進電機以外的電機尤其是高精度的步進電機之外并沒有做開環控制定位的,而用開環電路驅動的電機只有步進電機。例如無刷電機,首先為切換相,需要測出轉子
2023-09-24 08:08:441735 步進電機開環控制與閉環控制有什么區別? 介紹步進電機開環控制和閉環控制的區別 概述: 步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用
2023-10-24 11:49:19823 開環電機是一種沒有反饋控制的電機,也稱為非閉環電機。其輸出轉速和位置由輸入控制信號決定,沒有位置或速度反饋回路來控制輸出。其特點是成本低、結構簡單、轉速波動大且誤差較大,適用于一些不要求精度和負載變化較小的應用場景。
2023-10-25 09:27:332019 步進電機開環控制和閉環控制的區別概述:步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用于控制精度要求較高的場合,如打印機、數碼相機等。而對
2023-10-28 08:07:461306 步進電機工作原理 步進電機是一種控制方式特殊的電動機。相比傳統的直流電動機,步進電機具有精準定位、高轉矩、高效能等優勢,被廣泛應用于各種自動化設備中。步進電機的工作原理可以簡單地分為兩個方面:磁場
2024-02-14 17:07:00357
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論