 電子發燒友App
電子發燒友App


?
?在對精度有要求的運動控制應用中,有很多伺服電機和設備執行器都可以滿足其要求,但是完整控制系統的選型、設計和集成對于運動控制的可重復性和精度十分關鍵。盡管相對于有競爭關系的技術而言,伺服電機有很多優點,但是在應用時還必須考慮一系列的因素。
高精度伺服系統運動控制的典型應用包括:印刷設備、旋轉填料機、取放型機器人、實驗或組裝操作、鉆孔、切削、攻絲以及其它在單軸或多軸運動中使用的簡單索引移動控制等類似應用。
伺服系統一般用于控制負載。對于伺服來講,為了完成系統所需的負載控制功能,必須選取合適的型號。為了保證整個系統能夠按照設計要求工作,伺服系統必須提供所需的力矩、速度、精度。
負載類型、機械傳動方式、系統工作周期(啟動和停機的頻率)、運行期間系統所需的速度、系統所需的精度,都是在進行系統選型時應該考慮的因素。
伺服控制的優勢
對于要求精準控制運動的應用,有很多方案可供選擇,包括帶變頻驅動的直流電機和交流電機、步進電機和伺服電機。
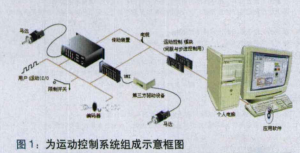
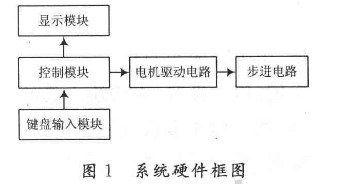
圖1 這種伺服電機和驅動裝置可以為一系列廣泛的運動控制引用提供精確的定位。利用伺服驅動和內部的“索引器”,最多可以預先配置8個索引運動,并安裝到驅動器中,然后就可以通過來自PLC或PAC的開關量輸入進行選擇和執行相應的運動。本文所有圖片來源:AutomationDirect
從定位、速度,和力矩控制精度方面來講,伺服系統提供了可能是最高水平的性能。相較于低成本的步進電機系統,伺服系統在更高的轉速下(最高可達5,000轉/分鐘)仍可以提供更大的力矩。步進電機,最大力矩發生在零轉速時,而伺服電機的最大力矩發生在更高的轉速。用于設備控制的典型伺服系統,所能提供的功率范圍也比步進電機更大,可達3千瓦或更多。
也許,步進電機和伺服電機之間最顯著的不同在于:伺服電機利用閉環控制改進了定位精度。盡管某些步進電機裝置也具有閉環控制功能,但是能夠實現精確和高速的運動控制,并且沒有諸如電機停止以及定位錯誤等問題,仍然是伺服電機的普遍優勢。閉環位置控制、更高的力矩和更高的速度,使得伺服電機在高精度應用場合具有更大的優勢。
相較于具有變頻驅動的直流電機和交流電機,伺服電機在轉速、高峰值力矩和加速度方面具有非常明顯的優勢。伺服電機可以將轉速精確的控制在5,000轉/分鐘或更高。其閉環定位能力也遠遠的超過變頻電機和驅動設備的典型定位功能。伺服系統還能運行在純力矩模式下,這時系統提供特定的力矩而不需考慮定位或轉速。這是各種繞線操作的一般需求。
精確運動控制的8個關鍵因素
升級換代現有伺服系統時,功率大小一般不變,即使電機的物理大小并不一致。當為新應用選擇伺服系統時,可以利用選型軟件來幫助選擇,包括利用數學公式來確定負載的慣量、關鍵參數等。相關組件需要經過選擇、設計、安裝和測試,從而設計出一套伺服系統。
精確運動控制的8個關鍵組件: 1.伺服電機 2.編碼器反饋 3.電機驅動 4.變速箱 5.執行器 6.運動控制器 7.驅動器通訊硬件 8.控制和調節軟件
在設計中,伺服電機、編碼器反饋以及伺服驅動器(有時候被稱為放大器),必須將其設計成按照一個整體協同工作,使之與電機和負載匹配。
必須慎重考慮執行器的類型和材料選擇。在某些應用場合,例如,在精確運動應用中,鋁制握柄傳動器就有些過于柔軟,因此應當考慮剛性更大的材料或增加支撐結構。
對于高性能系統,負載的反射慣量,包括任何變速箱和執行器的慣量,應當盡可能的保持在較低水平(理想情況下需要與電機慣量保持在1:1的水平),但是,一般情況下,在慣量失配比高達5:1甚至是10:1的時候,其運行性能仍然可以接受。
選擇好合適的伺服系統和執行器,就可以確定用于調試和控制的運動控制器和相關軟件了。不管是單軸運動還是多軸運動系統,對于運動性能的要求,比如最大速度、加速度變化率(加速度的變化)、總行程、負加速度等必須加以審慎考慮,以便取得應用項目的成功。
變速箱和執行器的選擇
如果需要齒輪減速,相較于大多數其它齒輪減速裝置來講,精密行星式齒輪減速箱可以提供更好的精度和可重復性,并且它具有較高的效率,可以從伺服系統獲得最大的功率。變速箱可以降低負載的反射慣量,數值等于傳動比的平方。
如果某個應用需要在高速狀態下實現減速,則減速箱是一個很好的選擇,它可以改進系統的整體性能。在某些應用場合,利用減速箱可以倍增系統可用力矩的數量,從而可以使用較小的電機和驅動裝置,從而節省大量成本。
但是減速箱會將自身的反射慣量疊加到系統上,從而會引入一些反沖。大多數精密減速箱的反沖都比較小,但是設計人員需要意識到這個問題,并對由此所產生的定位錯誤采取適當措施。
當與行星式減速箱配合使用時,伺服系統可以與各種類型的執行器連接,提供精確的位置控制,但有一個前提條件:所有這些設備都必須是精心選擇,并且相互匹配的。盡管可以從不同的供應商那里分別購買伺服驅動裝置、伺服電機以及行星式減速箱,但是并不推薦這樣做,因為這需要大量的調研、設計和分析,以確保所有的設備都是配套的。
圖2 在很多需要高精度定位或高力矩應用場合,行星式減速器和伺服電機配合工作良好。
從同一個供應商處采購所有設備,尤其是那些經過仔細匹配的設備,具有多重優點。供應商已經完成了所有的研究工作,可以為用戶確保兼容性。大多數供應商還可為這種采購提供更優惠的質保,供應商還可提供連接這些設備所需的、經認證的硬件和電纜。
在線選型工具
某些供應商提供了在線選型工具,可以用于選擇伺服系統以及配套的減速箱,減少設計工作。在線選擇指導對設計提供幫助,還能為某些緊密連接、相互配套、可以作為一個系統來采購的設備提供某些建議。
一般情況下,選擇工具會要求設計人員輸入轉速和力矩,接著就自動提供一系列可供選擇的電機-減速箱組合。工程師可以輸入以公制或英制力矩數據,或者設計人員可以選擇特定的伺服電機型號。設計人員輸入單個數據或者選擇一個傳動比。最后,工程師就可以選擇合適的物理結構形式:直線或者直角齒輪,或者是兩者都有。
系統清單包括價格信息,很多情況下對于選擇過程來講,價格是一個關鍵因素。選擇完電機/減速箱組合后,設計人員就可以審查所選伺服系統、減速箱以及兩者組合體的完整規格書了。
更先進的選擇工具,可以為伺服電機的選擇提供幫助。有些應用程序可以幫助設計人員為某個特定工程選擇最優電機。軟件能夠計算所需的轉速和力矩,并且驗證系統的其它需求,比如頂端速度、加速度和慣量不匹配等。
利用軟件,設計工程師能夠對機械系統進行建模,包括導螺桿、同步皮帶、減速箱等諸如此類的部件。一旦模型化,軟件就可以為給定機械裝置布局,推薦最優的電機。軟件可以根據客戶的應用規格書來計算力矩、速度和慣量需求;處理來自數據庫的電機數據;創建滿足需求的清單。軟件提供最優的電機,供客戶從清單中進行選擇。
內部或外部控制?
大多數伺服系統能夠接收來自于外部控制器的傳統運動指令,比如可編程邏輯控制器(PLC)和可編程自動控制器(PAC),而且某些驅動裝置也具有提供內部運動控制的能力。利用伺服驅動和內部的“索引器”,最多可以預先配置8個索引運動,并安裝到驅動器中,然后就可以通過來自PLC或PAC的開關量輸入進行選擇和執行相應的運動。
利用串口協議,從外部控制器就可以發送指令,啟動甚至是改變這些預定義索引文件。運動指令可以是增量或者是絕對值,加速度可以是線性或S型曲線。很多應用都從調整加速度或者選擇S型曲線的運動模式中獲益,因為這可以降低在運動過程中的位置過調。
有很多種方式可以實現從外部控制器來控制伺服驅動裝置。RS485/RS422 和Modbus串口通信是非常典型的、用于將運動指令傳遞給驅動器的通訊協議。指令在驅動器內執行并完成閉環控制。驅動器還可以由高速脈沖和方向信號來控制,或者由與速度或力矩成比例的模擬量電壓來控制。驅動和伺服電機也能跟隨外部的解碼器信號指令動作。
以上每種方式都會影響伺服系統的精度。教科書上所教的模擬量電壓信號也許沒有新式數字控制方式,比如內部控制或外部脈沖和方向信號更精確。系統的分辨率可以通過數字驅動指令方案來進行計算,應當對其進行檢查以確保能夠滿足系統整體精度的需求。
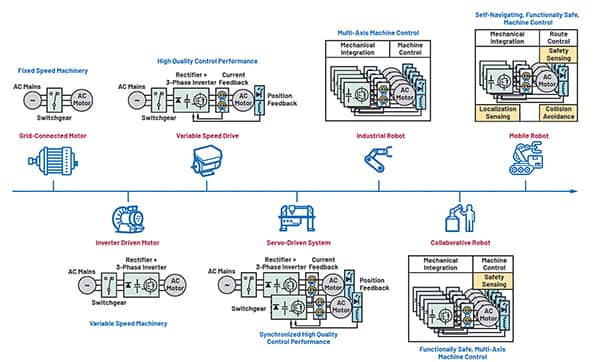
當使用外部運動控制器作為主控制器時,多個驅動裝置可以通過驅動器的串口,以菊花鏈形式連接和尋址。這就可以為不需精確路徑控制的多軸過程提供非常簡單而又強大的控制功能,僅需準確的開始和停止點(圖3)。
圖3 對于連續運動的組合裝置,這個三軸系統的伺服和驅動裝置可以提供精確的協調運動。選擇伺服系統及其配套減速箱的在線工具包括AutomationDirect公司的SureGear在線選型器。
伺服系統編程
無論是外部運動控制器還是內部控制器驅動,運動控制軟件及其特性和功能對于整個系統的精度影響很大。對于具有板載索引器和自適應調節模式的驅動器來講,必須對其進行適當的配置,正如外部運動控制器也需要適當的配置一樣。
當需要高動態響應時,應該對伺服系統進行精心調節,一般需要和負載連接。無論是使用自適應調節軟件或者是編程人員手動調節,精準的調節都可以實現快速移動,最大程度的降低海綿狀運動,同時可以降低過調或移動結束后的振動。
驅動配置軟件可以提供驅動參數的配置、自動調節算法和工具,可以幫助大多數應用尋找最優設置。
一旦驅動器配置并調節完成,就可以編程實現運動軌跡。S型-曲線加速度圖,相較于不規則四邊形(線性)位移,可以提供更好的定位精度,更小超調量,在具有邊界調節的伺服系統中更是如此。這些標準運動模式的能力可以改進精度,減少系統沖擊和振動。
某些時候,執行器的控制序列會影響精度。比如,在降低反沖以及相關的定位錯誤時常用的一個方法就是從公共方向到達多個目的位置。在需要逆向移動的場合,有些設計人員將其設計成:負載移動到目的位置后,并不停止,然后調轉方向,從公共位置移動到期望的位置。
選擇恰當的伺服系統、減速箱和驅動器組合,有助于應對各種各樣的精密自動化挑戰。
編輯:黃飛











 工商網監
工商網監
評論