步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度。
2023-03-01 09:54:49 4875
4875 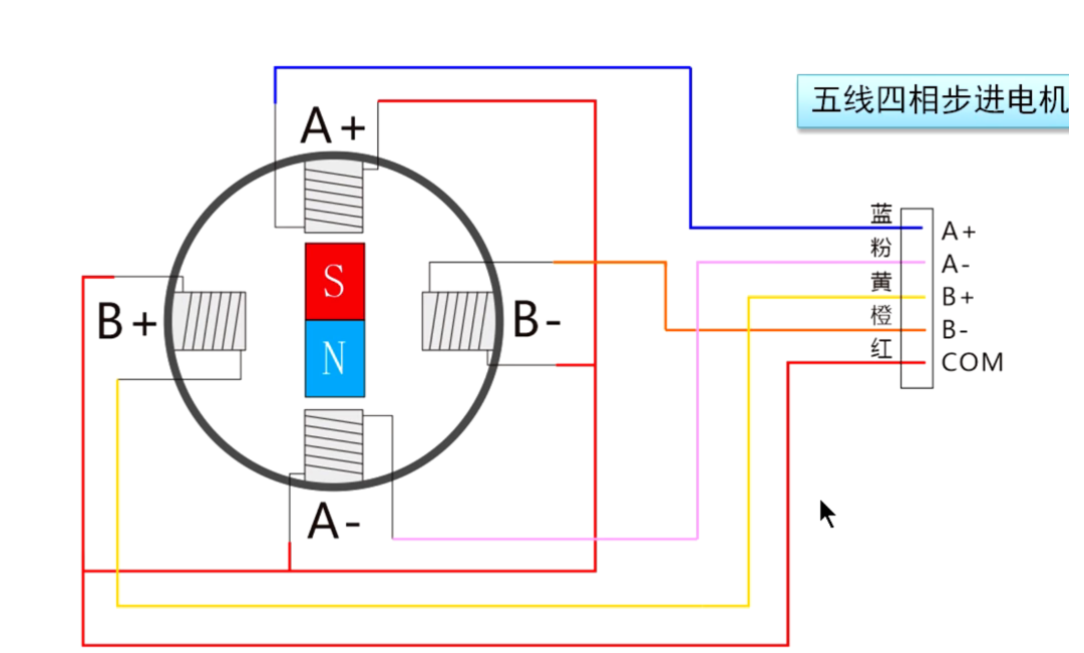
步進(jìn)電機(jī)是我們生活中常見的電機(jī)之一。顧名思義,步進(jìn)電機(jī)是根據(jù)一系列步距角進(jìn)行旋轉(zhuǎn),就像人們一步步上下樓梯一樣。步進(jìn)電機(jī)將完整的360度旋轉(zhuǎn)等分為若干步長(zhǎng),按順序執(zhí)行步長(zhǎng)從而實(shí)現(xiàn)特定旋轉(zhuǎn),同時(shí)通過
2023-03-08 15:12:392734 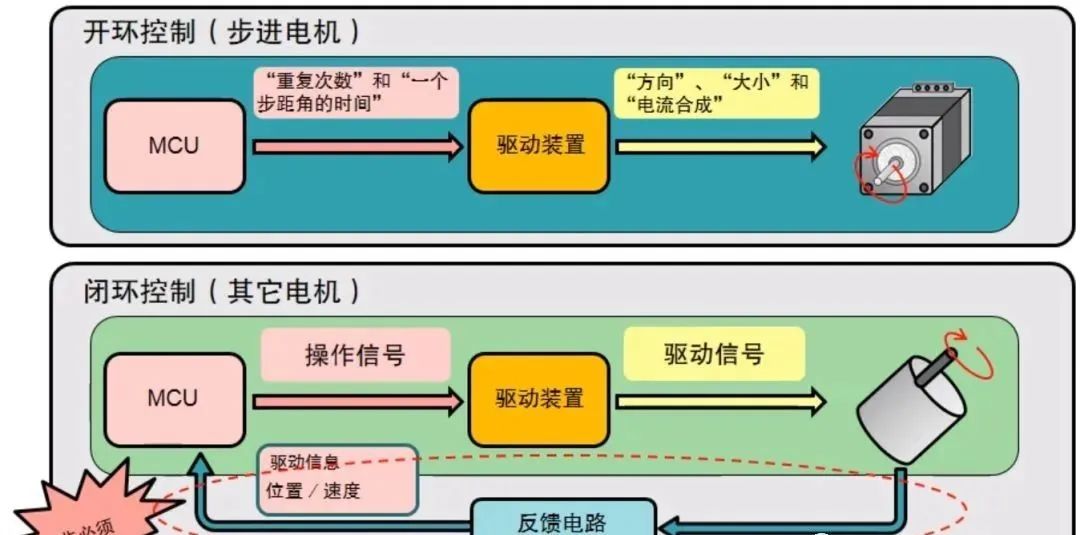
步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為“步距角”。
2023-03-14 09:37:213111 步進(jìn)電機(jī)控制器總結(jié)一、整體框架:系統(tǒng)在通信方式時(shí)支持主從控制二、系統(tǒng)原理1、 控制信號(hào)模塊電機(jī)控制信號(hào):EN——>電機(jī)使能信號(hào),只有當(dāng)該信號(hào)有效的時(shí)候,步進(jìn)電機(jī)才會(huì)工作DIR/CP+——>
2021-09-07 07:46:23
`步進(jìn)電機(jī)控制算法步進(jìn)電機(jī)控制通常采用雙向驅(qū)動(dòng)電流,其電機(jī)步進(jìn)由按順序切換繞組來實(shí)現(xiàn)。通常這種步進(jìn)電機(jī)有3個(gè)驅(qū)動(dòng)順序:?jiǎn)蜗嗳?b class="flag-6" style="color: red">步進(jìn)驅(qū)動(dòng):在這種模式中,其繞組按如下順序加電,AB/CD/BA/DC(BA
2014-01-22 10:49:38
**步進(jìn)電機(jī)開環(huán)控制步進(jìn)電機(jī)開環(huán)伺服系統(tǒng)的一般構(gòu)成步進(jìn)電動(dòng)機(jī)的電樞通斷電次數(shù)和各相通電順序決定了輸出角位移和運(yùn)動(dòng)方向,控制脈沖分配頻率可實(shí)現(xiàn)步進(jìn)電動(dòng)機(jī)的速度控制。因此,步進(jìn)電機(jī)控制系統(tǒng)一般采用開環(huán)
2021-07-07 06:56:09
`各位大神好,,我有一個(gè)2相4線的步進(jìn)電機(jī),并有相應(yīng)的驅(qū)動(dòng)器(淘寶購(gòu)買),我現(xiàn)在有一列脈沖信號(hào)和一列方向信號(hào)(一半脈沖對(duì)應(yīng)的方向為0或1,另一半的脈沖對(duì)應(yīng)的方向為1或0),當(dāng)我以前半周為1后半周
2015-01-19 20:14:54
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖個(gè)數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2021-06-28 08:34:17
元件篇:步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)
2021-09-01 08:06:40
步進(jìn)電機(jī)單雙脈沖控制是什么?
2021-12-21 07:42:56
步進(jìn)電機(jī)只能一個(gè)方向轉(zhuǎn)?步進(jìn)電機(jī)只能一個(gè)方向轉(zhuǎn)的原因是DIP開關(guān)設(shè)置錯(cuò)誤,單脈沖輸入時(shí)設(shè)置在ON,雙脈沖設(shè)置在OFF。看看驅(qū)動(dòng)器上的設(shè)置,一般來說我們都采用方向+脈沖控制,你看看是不是弄成雙脈沖方式了。另外如果你確實(shí)接的方向+脈沖控制的話,你試試改變下方向信號(hào)電平,比如原來是高現(xiàn)在給低電平。...
2021-06-29 09:29:16
直流電機(jī)分為哪幾種?什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)可以實(shí)現(xiàn)電機(jī)轉(zhuǎn)速和位置的精確控制嗎?
2021-09-14 06:10:07
步進(jìn)電機(jī)是將電脈沖信號(hào)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載情況下,電機(jī)的轉(zhuǎn)速,停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過一個(gè)步距角。這一
2021-07-07 07:20:28
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、 停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī) 則轉(zhuǎn)過一個(gè)步距
2021-09-07 08:43:04
步進(jìn)電機(jī)的加、減速是怎么加的,聽說是有拋物線式,指數(shù)式的啟動(dòng)方式?
2016-02-01 14:52:47
`傳統(tǒng)的步進(jìn)電機(jī)脈沖控制是用一對(duì)相位差90度的方波來驅(qū)動(dòng)步進(jìn)電機(jī)的A、B相線圈電流,以達(dá)到定向轉(zhuǎn)動(dòng)的目的。 以A相線圈通電超前B相90度時(shí),方向為正。當(dāng)線圈B相超前A相90度通電時(shí),電機(jī)反方向轉(zhuǎn)
2012-02-24 21:58:30
步進(jìn)電機(jī)的概述步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),應(yīng)用極為廣泛。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收
2021-07-08 08:38:59
一、前言步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過一個(gè)
2021-07-08 07:57:57
優(yōu)缺點(diǎn)都非常的突出,具體來說,步進(jìn)電機(jī)的優(yōu)點(diǎn)包括電機(jī)操作簡(jiǎn)單,易于通過脈沖信號(hào)輸入到電機(jī)進(jìn)行控制;不需要反饋電路來反饋旋轉(zhuǎn)軸的位置和速度信息(開環(huán)控制);由于沒有接觸電刷可靠性更高。當(dāng)然,在諸多優(yōu)點(diǎn)
2022-10-30 11:39:10
》這本書,進(jìn)行的學(xué)習(xí)過程中的知識(shí)記錄和心得體會(huì)的記錄。5.6 閉環(huán)控制??步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。例如無刷電機(jī),首先為切換相,
2021-07-07 06:18:52
步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖
2021-07-07 07:00:38
依賴于轉(zhuǎn)子的位置,而是按一固定的規(guī)律發(fā)出控制脈沖,步進(jìn)電機(jī)僅依靠這一系列既定的脈沖而工作,這種控制方式由于步進(jìn)電機(jī)的獨(dú)特性而比較適合于控制步進(jìn)電機(jī),適合于我國(guó)的國(guó)情這種種控制方式的特點(diǎn)是:控制簡(jiǎn)單
2018-10-16 18:17:33
步進(jìn)電機(jī)驅(qū)動(dòng)器的脈沖信號(hào)和方向控制信號(hào)可以由單片機(jī)的I/O端口通過循環(huán)、延時(shí)編程直接產(chǎn)生嗎?
2023-04-04 16:48:15
基于ATMEGA32的脈沖控制2相4線步進(jìn)電機(jī),要求!!!!輸出脈沖平穩(wěn)。。。求各位大俠幫幫忙!!
2012-09-05 18:21:32
01BLDC電機(jī)控制算法無刷電機(jī)屬于自換流型(自我方向轉(zhuǎn)換),因此控制起來更加復(fù)雜。BLDC電機(jī)控制要求了解電機(jī)進(jìn)行整流轉(zhuǎn)向的轉(zhuǎn)子位置和機(jī)制。對(duì)于閉環(huán)速度控制,有兩個(gè)附加要求,即對(duì)于轉(zhuǎn)子速度/或電機(jī)
2021-04-27 06:30:00
57BYG250B步進(jìn)電機(jī)參數(shù)(重點(diǎn)關(guān)注其接線方式)SR4驅(qū)動(dòng)器驅(qū)動(dòng)器與步進(jìn)電機(jī)接線方式:V+~V-接24V電源驅(qū)動(dòng)器與arduino控制板接線方式:STEP+DIR+分別接arduino板的兩個(gè)
2021-08-31 09:24:40
實(shí)驗(yàn)室有個(gè)項(xiàng)目涉及到多個(gè)步進(jìn)電機(jī)以及伺服電機(jī)的控制,需要電機(jī)得到一個(gè)觸發(fā)信號(hào)后精確移動(dòng)一段距離。下面以單個(gè)伺服電機(jī)控制為例,利用伺服電機(jī)的指令脈沖加方向位置控制模式實(shí)現(xiàn)jing'que...
2021-06-28 08:34:18
,電機(jī)的轉(zhuǎn)速、停止的位置取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,非超載狀態(tài)下,根據(jù)上述線性關(guān)系,再加上步進(jìn)電機(jī)只有周期性誤差而無累積誤差,因此步進(jìn)電機(jī)適用于單片機(jī)控制。步進(jìn)電機(jī)通過輸入脈沖
2021-04-01 16:47:56
↑ 點(diǎn)擊上方“伺服與運(yùn)動(dòng)控制”關(guān)注我們很多工控朋友和PLC自動(dòng)化從業(yè)者都知道步進(jìn)電機(jī),但也有部分PLC入門學(xué)員不明白為什么步進(jìn)電機(jī)要加一個(gè)步進(jìn)驅(qū)動(dòng)器,而不是像普通電機(jī)那樣直接插入電源就可以使用,今天
2021-08-31 06:10:04
信號(hào),按照步進(jìn)電機(jī)的結(jié)構(gòu)特點(diǎn),順序分配脈沖,實(shí)現(xiàn)控制角位移、旋轉(zhuǎn)速度、旋轉(zhuǎn)方向、制動(dòng)加載狀態(tài)、自由狀態(tài)。控.
2021-07-07 06:19:42
位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定...
2021-07-07 06:55:49
步進(jìn)電動(dòng)機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(這個(gè)角度叫做歩距角)。我們可以通過控制脈沖的個(gè)數(shù)來控制電機(jī)的角位移量
2018-10-17 10:20:27
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。
2019-10-24 08:08:21
一、如何控制步進(jìn)電機(jī)的方向?1、可以改變控制系統(tǒng)的方向電平信號(hào)2、可以調(diào)整電機(jī)的接線來改變方向,具體做法如下: 對(duì)于兩相電機(jī),只需將其中一相的電機(jī)線交換接入驅(qū)動(dòng)器即可,如A+和A-交換。對(duì)于三相電機(jī),將相鄰兩相的電機(jī)線交換, 如:A,B,C三相,交換A,B兩
2021-08-31 08:00:21
如何利用伺服電機(jī)的指令脈沖加方向位置控制模式實(shí)現(xiàn)精確位置控制?
2021-09-27 06:58:37
S7 200的PTO脈沖輸出功能有何作用?如何去實(shí)現(xiàn)步進(jìn)電機(jī)的XY精確位置控制?
2021-10-11 06:16:44
開環(huán)位置控制,輸入一個(gè)脈沖信號(hào)就得到一個(gè)規(guī)定的位置增量。 這樣的增量位置控制系統(tǒng)與傳統(tǒng)的直流伺服系統(tǒng)相比,其成本明顯降低,幾乎不 必進(jìn)行系統(tǒng)調(diào)整。因此,步進(jìn)電機(jī)廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人、遙控
2018-10-31 11:13:25
如何用Arduino開發(fā)版實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)速控制和方向控制?
2021-10-15 06:49:05
怎么才能實(shí)現(xiàn)高精度的步進(jìn)電機(jī)位置控制
2023-10-13 07:40:50
負(fù)載信號(hào)的影響。每給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)就轉(zhuǎn)過一個(gè)步距角,帶動(dòng)機(jī)械移動(dòng)一小段距離。
步進(jìn)電機(jī)的速度控制:通過輸入的脈沖頻率快慢實(shí)現(xiàn)的。當(dāng)發(fā)生脈沖的頻率減小時(shí),步進(jìn)電機(jī)的速度就下降;當(dāng)頻率增加
2023-08-03 17:03:41
概述在成功啟動(dòng)步進(jìn)電機(jī)之后,可通過運(yùn)行數(shù)個(gè)脈沖后停止定時(shí)器做到控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng)特定角度,實(shí)現(xiàn)脈沖定位。前言STM32控制啟動(dòng)步進(jìn)電機(jī)原理步進(jìn)電機(jī)是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),也就是當(dāng)步進(jìn)驅(qū)動(dòng)器
2021-07-07 07:45:12
運(yùn)行到位。二、總線控制與脈沖控制的區(qū)別?步進(jìn)電機(jī)靠接收脈沖電流來實(shí)現(xiàn)速度、位置和方向的控制, 脈沖的多少?zèng)Q定步進(jìn)電機(jī)的位置,脈沖的速率決定電機(jī)的轉(zhuǎn)速,脈沖的方向決定電機(jī)的轉(zhuǎn)向。 現(xiàn)在大多數(shù)步進(jìn)電...
2021-07-05 08:03:59
,可以簡(jiǎn)單的位置控制(低速)使用定時(shí)器中斷,基數(shù)脈沖個(gè)數(shù)。可以對(duì)步進(jìn)電機(jī)做梯形或者S形的加速控制。優(yōu)點(diǎn):可以降低步進(jìn)電機(jī)的開環(huán)丟步,但是頻繁中斷。關(guān)于步進(jìn)伺服電機(jī)1:?jiǎn)?b class="flag-6" style="color: red">脈沖法 :參考步進(jìn)電機(jī)2:門控方式:用主從定時(shí)器門控方式,比較繁瑣;3:高級(jí)定時(shí)器T1、T8的重復(fù)計(jì)數(shù)方式 高級(jí)定時(shí)器有一個(gè)8位
2021-06-28 08:07:43
1.步進(jìn)電機(jī)圖片2.步進(jìn)電機(jī)介紹步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)
2021-07-07 08:02:04
數(shù)確定,改變脈沖輸入頻率,就可以改變電機(jī)的速度;改變通電順序,即改變定子磁場(chǎng)旋轉(zhuǎn)的方向,就可以達(dá)到控制步進(jìn)電機(jī)正反轉(zhuǎn)的目的。正是因?yàn)?b class="flag-6" style="color: red">步進(jìn)電機(jī)具備上述特點(diǎn),它已經(jīng)被廣泛地用于數(shù)控機(jī)床、精密旋轉(zhuǎn)和線性位移系統(tǒng)
2019-04-09 09:40:01
一用通過運(yùn)動(dòng)采集卡來控制步進(jìn)電機(jī)相比, 本文采用的計(jì)算機(jī)并口作為連接機(jī)和步進(jìn)電機(jī)驅(qū)動(dòng)器的通訊媒介來傳輸脈沖信號(hào)的方式, 不僅價(jià)格低廉, 而且更加容易推廣。 2.系統(tǒng)控制的研究方案 2.1系統(tǒng)總體
2019-05-08 06:15:33
方式下,步進(jìn)電機(jī)控制脈沖的輸入并不依賴于轉(zhuǎn)子的位置,反而是按一固定的規(guī)律發(fā)出其控制脈沖,步進(jìn)電機(jī)僅依靠這一系列既定的脈沖而工作。大部分基于步進(jìn)電機(jī)的運(yùn)動(dòng)系統(tǒng)運(yùn)行在開環(huán)狀態(tài)下,因此能夠提供低成本
2022-11-12 11:24:12
步進(jìn)電機(jī)是機(jī)電控制中一種常用的執(zhí)行機(jī)構(gòu),它的用途是將電脈沖轉(zhuǎn)化為角位移,通俗地說:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角
2010-07-23 22:18:37 207
207 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī)。在未發(fā)生失步情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù)并不受負(fù)載變化的影響,當(dāng)步進(jìn)電機(jī)接收到一個(gè)脈沖信號(hào)時(shí),電機(jī)就按設(shè)定
2016-08-29 18:59:592380 
脈沖分別接的是兩臺(tái)步進(jìn)電機(jī)的脈沖輸入端口,而兩臺(tái)步進(jìn)電機(jī)的方向則通過其它輸出端口進(jìn)行控制。這樣就實(shí)現(xiàn)了通過一路正轉(zhuǎn)/反轉(zhuǎn)脈沖輸出來控制兩臺(tái)步進(jìn)電機(jī)的功能。
2017-10-09 09:06:143 步進(jìn)電機(jī)是靠接收脈沖電流來實(shí)現(xiàn)速度、位置和方向的控制,脈沖的多少?zèng)Q定步進(jìn)電機(jī)的位置,脈沖的速率決定電機(jī)的轉(zhuǎn)速,脈沖的方向決定電機(jī)的轉(zhuǎn)向。現(xiàn)在大多數(shù)步進(jìn)電機(jī)的控制方式就是用plc發(fā)脈沖給驅(qū)動(dòng)器,驅(qū)動(dòng)器
2017-12-14 15:46:1235485 進(jìn)電機(jī)作為一種常用的電氣執(zhí)行元件,廣泛應(yīng)用于自動(dòng)化控制領(lǐng)域。步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)需要配備一個(gè)專門的驅(qū)動(dòng)電源,驅(qū)動(dòng)電源的輸出受外部的脈沖信號(hào)和方向信號(hào)控制。每一個(gè)脈沖信號(hào)可使步進(jìn)電機(jī)旋轉(zhuǎn)一個(gè)固定的角度,這個(gè)
2017-12-14 15:52:5320744 
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2018-02-11 13:50:0014151 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載
2018-02-07 15:41:3520 步進(jìn)電機(jī)作為控制用的特種電機(jī),是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,它的旋轉(zhuǎn)是以固定的步進(jìn)角度一步一步運(yùn)行的。
2018-03-29 10:49:3118658 
步進(jìn)電動(dòng)機(jī)的控制方式一般分為開環(huán)控制與閉環(huán)控制兩種控制方式,其中開環(huán)控制步進(jìn)電機(jī)最簡(jiǎn)單的控制方式就是玎環(huán)控制系統(tǒng),在這樣的控制方式下,步進(jìn)電機(jī)控制脈沖的輸入并不依賴于轉(zhuǎn)子的位置,反而是按一固定的規(guī)律
2018-04-25 14:28:54106655 
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的執(zhí)行機(jī)構(gòu)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過一個(gè)步距角。這一
2018-11-27 07:48:004171 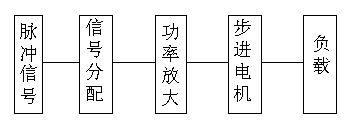
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2019-07-31 17:35:0016 工業(yè)控制上用到的步進(jìn)電機(jī)有多種控制方式。對(duì)于空調(diào)使用的步進(jìn)電機(jī)并不太了解,但從它控制簡(jiǎn)單,且主要需要價(jià)格便宜的特性來看,它應(yīng)該是使用的脈沖控制方式。
2019-10-07 16:39:0015368 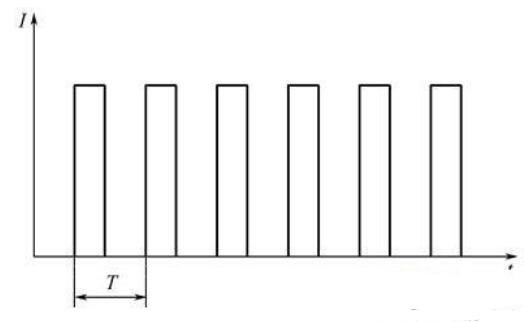
步進(jìn)電機(jī)是一種很常見的動(dòng)力元件,步進(jìn)電機(jī)可以很方便的由控制系統(tǒng)控制其速度與轉(zhuǎn)動(dòng)方向。那么使用PLC如何控制步進(jìn)的速度與方向呢。
2020-02-16 22:37:5820197 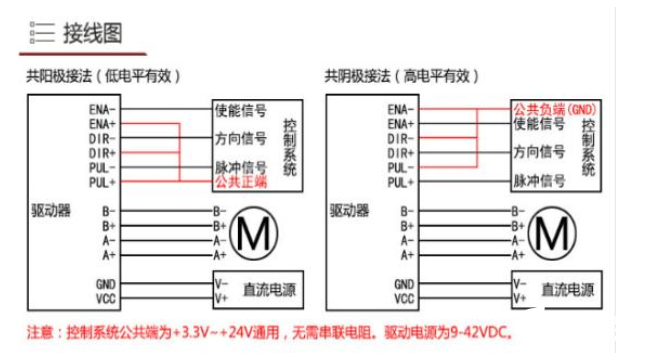
步進(jìn)電機(jī)和伺服電機(jī)的控制方式不同,步進(jìn)電機(jī)是通過控制脈沖的個(gè)數(shù)控制轉(zhuǎn)動(dòng)角度的,一個(gè)脈沖對(duì)應(yīng)一個(gè)步距角,但是沒有反饋信號(hào),電機(jī)不知道具體走到了什么位置,位置精度不夠高。
2020-03-07 10:26:453176 步進(jìn)電機(jī)又稱為脈沖電機(jī),基于最基本的電磁鐵原理,它是一種可以自由回轉(zhuǎn)的電磁鐵,其動(dòng)作原理是依靠氣隙磁導(dǎo)的變化來產(chǎn)生電磁轉(zhuǎn)矩,步進(jìn)電機(jī)的角位移量與輸入的脈沖個(gè)數(shù)嚴(yán)格成正比,而且在時(shí)間上與脈沖同步,因而只要控制脈沖的數(shù)量、頻率和電機(jī)繞組的相序,即可獲得所需的轉(zhuǎn)角、速度和方向。
2021-01-20 12:52:417 步進(jìn)電機(jī)受電脈沖信號(hào)控制,電脈沖信號(hào)的產(chǎn)生、分配、放大全靠電子元器件的動(dòng)作來實(shí)現(xiàn)。由于脈沖控制信號(hào)的驅(qū)動(dòng)能力一般都很弱,因此必須有功率放大驅(qū)動(dòng)電路。步進(jìn)電機(jī)與控制電路、功率放大驅(qū)動(dòng)電路組成一體,構(gòu)成
2021-08-09 23:27:4715833 :1,步進(jìn)電機(jī)控制模塊2,矩陣鍵盤輸入模塊3,顯示輸出模塊步進(jìn)電機(jī)工作原理步進(jìn)電機(jī)通過輸入脈沖信號(hào)進(jìn)行控制,即電機(jī)的總轉(zhuǎn)動(dòng)角度由輸入脈沖總數(shù)決定,而電機(jī)的轉(zhuǎn)速...
2021-11-05 14:36:007 最簡(jiǎn)單的步進(jìn)電機(jī)驅(qū)動(dòng)方法是單相雙極驅(qū)動(dòng)方式,也稱為雙相步進(jìn)驅(qū)動(dòng)方式。該方式只需要使用一個(gè) H橋驅(qū)動(dòng)器和一個(gè)脈沖發(fā)生器,即可實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2023-03-08 14:21:5612542 步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過輸入脈沖信號(hào)來控制它的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動(dòng)電路組成,驅(qū)動(dòng)電路負(fù)責(zé)將輸入的脈沖信號(hào)轉(zhuǎn)換為電機(jī)的運(yùn)動(dòng)控制信號(hào)。
2023-03-08 14:33:332951 步進(jìn)電機(jī)和伺服電機(jī)是兩種常見的電機(jī)類型,它們的應(yīng)用場(chǎng)景和控制方式不同,下面是它們的區(qū)別和選型方法:
步進(jìn)電機(jī)是一種開環(huán)控制電機(jī),控制信號(hào)為脈沖信號(hào),通過控制脈沖數(shù)量和頻率來控制電機(jī)的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)具有簡(jiǎn)單的控制方式、低成本和較高的精度,但通常不能提供高速運(yùn)動(dòng)和高負(fù)載扭矩。
2023-03-08 14:40:451257 步進(jìn)電機(jī)的旋轉(zhuǎn)速度可以通過控制脈沖信號(hào)的頻率和電機(jī)驅(qū)動(dòng)方式來實(shí)現(xiàn)。
脈沖頻率控制:步進(jìn)電機(jī)的旋轉(zhuǎn)速度與脈沖信號(hào)的頻率成正比,因此可以通過調(diào)整脈沖信號(hào)的頻率來控制電機(jī)的旋轉(zhuǎn)速度。一般來說
2023-03-08 17:03:123337 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
前面學(xué)習(xí)了1200高速脈沖輸出功能的應(yīng)用,那1500如何輸出高速脈沖控制步進(jìn)電機(jī)呢?
2023-03-10 09:44:326582 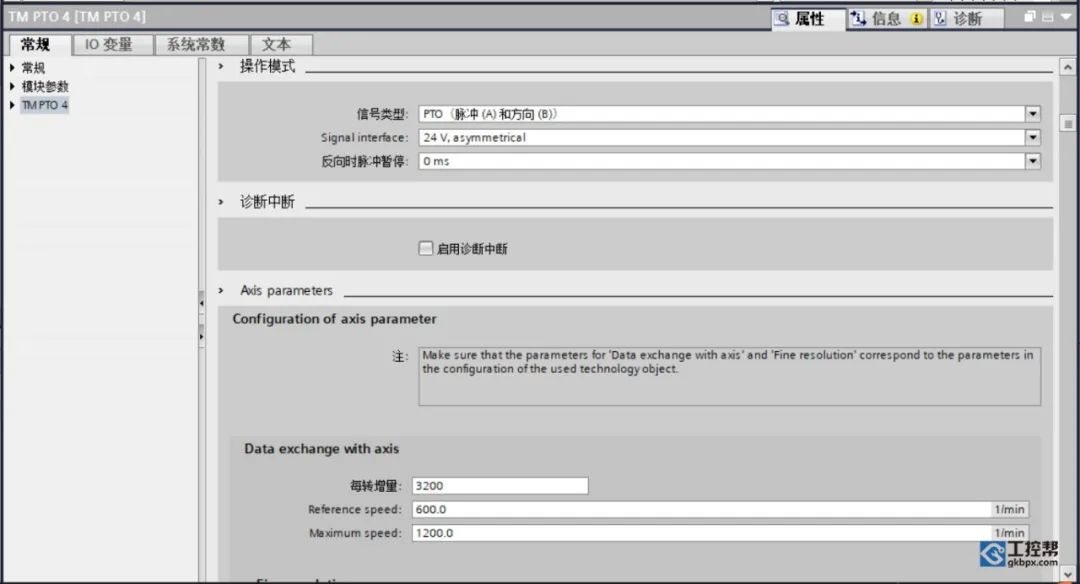
步進(jìn)電機(jī)的驅(qū)動(dòng)方式可以描述為:
1、步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。
2、當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。
3、通過
2023-03-16 14:04:533 3、使能、方向端 引腳配置 三、STM32F407定時(shí)器中斷控制步進(jìn)電機(jī)程序 0、引腳配置圖 1、使用到的HAL庫(kù)函數(shù) 2、脈沖觸發(fā)定時(shí)器初始化配置 3、步進(jìn)電機(jī)脈沖設(shè)置 4、步進(jìn)電機(jī)使能、失能、改變方向
2023-03-16 09:28:474 控制。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。即,給電機(jī)加一個(gè)脈 沖信號(hào),電機(jī)則轉(zhuǎn)過一個(gè)步距角。由于這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期性
2023-03-21 13:49:050 利用單片機(jī)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制,編寫程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動(dòng)。同時(shí),要求按下“Positive(正轉(zhuǎn))”按鍵時(shí),控制步進(jìn)電機(jī)
2023-03-21 15:25:243 步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不
受負(fù)載變化的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí),它就可以驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為“步距角”。
2023-03-21 15:20:551 一個(gè)步距角。
特點(diǎn) 1)當(dāng)步進(jìn)電機(jī)接收到一定順序的脈沖時(shí),它就會(huì)根據(jù)脈沖的控制時(shí)序進(jìn)行順時(shí)針和逆時(shí)針的轉(zhuǎn)動(dòng), 脈沖的順序決定了步進(jìn)電機(jī)旋轉(zhuǎn)的方向,脈沖的個(gè)數(shù)決定了步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的角度,脈沖的頻率決定了步進(jìn)電機(jī)的轉(zhuǎn)速; 2)有脈沖
2023-03-21 11:01:202 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。
步進(jìn)電機(jī)收到一個(gè)脈沖,步進(jìn)電機(jī)走一個(gè)步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖
2023-03-22 10:42:590 步進(jìn)電機(jī)的控制方式為開關(guān)控制,即沒有反饋裝置。例如某控制器(PLC)向步進(jìn)電機(jī)發(fā)送了800個(gè)脈沖,那么究竟該步進(jìn)電
機(jī)有沒有走對(duì)應(yīng)800個(gè)脈沖的距離或旋轉(zhuǎn)角度無法得知。
2023-03-22 14:19:172 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),
當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度
2023-03-22 11:32:550 在不使用PLC、單片機(jī)的情況下怎么只接控制步進(jìn)電機(jī)呢?
讓步進(jìn)電機(jī)動(dòng)起來需要有方向和脈沖,只要能夠收到脈沖信號(hào),電機(jī)就能根據(jù)一定的脈沖數(shù)量旋轉(zhuǎn)一定的角度。
那么我們使用編碼器作為輸入元件,怎么來控制步進(jìn)電機(jī)呢。
2023-03-22 09:45:072 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取
決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)
2023-03-23 11:45:104 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí)就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一
個(gè)固定的角度(稱為“步距角”),其旋轉(zhuǎn)以固定的角度運(yùn)行。可以通過控制脈沖個(gè)數(shù)來控制
2023-03-23 14:19:270 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信
號(hào),電機(jī)則轉(zhuǎn)過
2023-03-23 13:45:462 在成功啟動(dòng)步進(jìn)電機(jī)之后,可通過運(yùn)行數(shù)個(gè)脈沖后停止定時(shí)器做到控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng)特定角度,實(shí)現(xiàn)脈沖定位。
步進(jìn)電機(jī)是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),也就是當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)后,就會(huì)驅(qū)動(dòng)電機(jī)
2023-03-23 11:36:529 步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),又稱為脈沖電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、 停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響。
步進(jìn)電機(jī)是通過脈沖信號(hào)
2023-03-23 09:55:321 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:201184 機(jī)電設(shè)備中有的地方用的伺服電機(jī)。有的地方用的是步進(jìn)電機(jī),價(jià)格是相差很遠(yuǎn)的。
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于
2023-05-04 15:32:06895 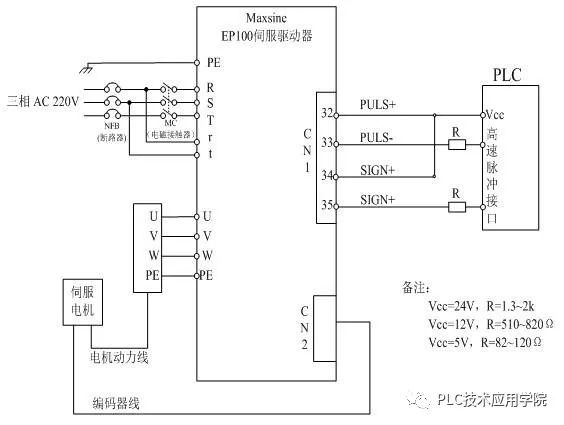
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:034 什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是通過脈沖信號(hào)進(jìn)行控制,將脈沖信號(hào)轉(zhuǎn)換成角位移或者線位移的電機(jī)。步進(jìn)電機(jī)想要運(yùn)行,需要被一種設(shè)備驅(qū)動(dòng),這種設(shè)備就是步進(jìn)電機(jī)驅(qū)動(dòng)板,當(dāng)步進(jìn)電機(jī)驅(qū)動(dòng)板接收到一個(gè)脈沖信號(hào),就驅(qū)動(dòng)
2022-10-24 11:28:171479 
plc作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。對(duì)于
2023-08-07 08:09:361052 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:10649 
步進(jìn)電機(jī)是一種開環(huán)控制的電機(jī),通過輸入脈沖信號(hào)來控制其轉(zhuǎn)角和方向。主要有以下幾種控制方式。
2023-09-05 10:50:251786 步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào),加以放大以驅(qū)動(dòng)步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比,控制步進(jìn)電機(jī)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位。
2023-10-19 10:59:42262 
基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162584 
本節(jié)介紹用定時(shí)器定時(shí)的方式,精準(zhǔn)控制脈沖時(shí)間,從而控制步進(jìn)電機(jī)速度
2023-10-26 14:14:58613 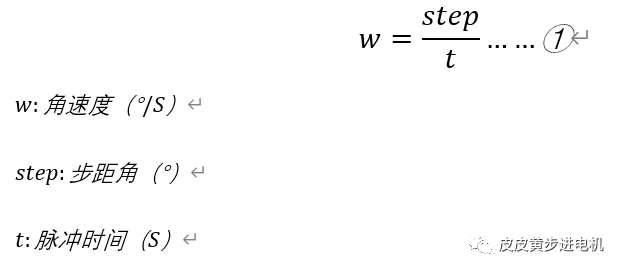
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:52942 
步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:18318
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論