 電子發燒友App
電子發燒友App


模糊控制器是一種基于模糊邏輯的控制器,通過將輸入變量和輸出變量都表示為模糊量,并運用模糊推理來實現針對復雜系統的控制。與傳統的控制器相比,模糊控制器更加適合那些難以建模或者模型不精確的系統。
使用模糊控制器的基本流程如下:
1.?確定系統的輸入和輸出變量,以及它們的模糊集合;
2.?確定模糊控制器的規則庫,規定每個輸入模糊量與輸出模糊量之間的關系;
3.?將模糊控制器與系統進行集成,獲得系統的實時輸入,并通過模糊推理來獲得輸出;
4.?將輸出值轉化成系統實際控制信號,輸送給被控對象。
模糊控制器的原理主要基于模糊推理,即通過將輸入與輸出都表示成模糊量,然后利用一系列的模糊規則進行推理,獲得輸出結果。常用的模糊推理方法包括最大值(mamdani)方法和最小值(takagi-sugeno)方法。此外,模糊控制器也可以利用反饋機制、自適應方法等來提高控制效果和穩定性。
模糊控制器的原理及使用方法
- 控制器(170265)
- 模糊控制器(11479)


相關推薦
基于FPGA的模糊PID控制器的設計實現
本文主要詳解基于FPGA的模糊PID控制器的設計實現,首先介紹了FPGA工作原理、基本特點以及FPGA的優勢,其次闡述了使用Altera的FPGA設計實現的數字模糊PID控制器,具體的跟隨小編一起來了解一下。
2018-06-01 09:26:51 15747
15747
15747基于模糊控制器的液壓系統模糊控制的性能及應用研究
模糊控制系統的核心是模糊控制器,由模糊化、模糊推理、模糊判決(反模糊化)三部分組成,模糊控制工作原理見圖1,其中慮線部分表示模糊控制器;e、ec分別表示實測值與設定值的偏差及偏差變化率;E,EC
2021-01-24 10:36:002932
2932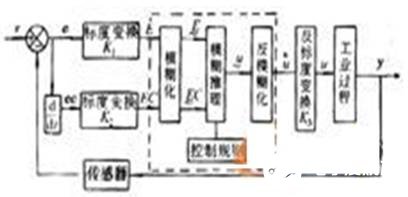
模糊控制中怎樣創建.fs文件
labview中模糊控制模糊控制相關范例里都有加載.fs這樣一個文件,好像是模糊控制器。有誰知道怎樣創建這樣的模糊控制器啊,有沒有例子給發一個,謝謝了!
2012-03-08 23:59:11
模糊控制設計
請問如圖設計模糊控制器,輸入三個隸屬度函數,想以隸屬度最大方法決定輸出值,輸出位離散的1,2,5三個值,為何輸出圖像沒有最后的5,去模糊化應選擇哪個方法?多謝!
2018-01-08 21:25:37
模糊控制器進行直流電動機的速度控制Matlab代碼?相關資料分享
下載使用模糊控制器進行直流電動機的速度控制Matlab代碼,模糊控制器進行直流電動機的速度控制Matlab代碼,模糊控制,直流電動機的速度控制,模糊控制電機速度。http://www.apollocode.net/a/1232.html...
2021-06-28 08:03:30
模糊PID控制算法如何控制勻速升溫
,誤差較小時采用模糊PID控制,實現了2種控制方法的優勢互補。 同時在此基礎上,給出了Fuzzy PID控制器設計、硬件結構和軟件設計,實驗曲線表明該控制算法可以獲得滿意的控制效果,采用模糊PID控制的效果明顯優于常規PID控制。
2019-05-30 10:38:57
PID控制器的設計
目 錄一、序言二、PID控制器的設計1.PID控制原理圖2.PID控制器傳遞函數的一般表達式三、模糊控制器的設計1.模糊控制原理圖2.模糊控制器傳遞函數一般表達形式四、系統仿真五、總結
2022-02-23 07:14:28
labview模糊控制器和pid
本帖最后由 夜魄Y 于 2020-3-24 07:41 編輯
如何將labview中的模糊控制器和pid結合在一起,利用模糊化后自動調整pid的三個參數Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-17 08:41:43
【高分討論】如何將labview中的模糊控制器和pid結合一起?
如何將labview中的模糊控制器和pid結合在一起,利用模糊化后自動調整pid的三個參數Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-19 10:34:29
利用Matlab工具箱設計模糊控制器步驟
Matlab模糊控制工具箱為模糊控制器的設計提供了一種非常便捷的途徑,通過它我們不需要進行復雜的模糊化、模糊推理及反模糊化運算,只需要設定相應參數,就可以很快得到我們所需要的控制器,而且修改也非常
2021-09-07 07:19:13
哪里可以免費實現C語言中的模糊邏輯控制器?
嗨,有人知道在哪里可以免費實現C語言中的模糊邏輯控制器嗎?是的,我知道AN600,但它是從1997和“不是最先進的”,因為它是匯編代碼。最好的問候。
2019-09-25 06:22:25
基于模糊控制的恒流源設計
部分采用精密運算放大器構成閉環反饋控制。電源部分采用大功率變壓器供電,多級電容濾除紋波干擾;電源輸出采用穩壓芯片進行穩壓。 2 控制原理與控制器設計 2.1 模糊控制 模糊控制屬于智能控制的一種
2018-11-13 10:53:53
基于雙閉環模糊PID控制器的開關電源控制的設計
采取了取常用對數并保持原來正負的方法重新標定,如圖5所示。在微分前加入低通濾波器以及在微分后加入一階采樣保持器的方法濾除過大尖峰的辦法弱化并消除干擾的影響。 模糊控制器采用Mamdani型。輸入輸出
2018-10-08 15:32:09
基型控制器的使用方法
目前,控制器(儀表)已經很多,產品已在工程實際中得到了廣泛的應用,基型控制器的使用方法如下:1.基型控制器主要性能指標基型控制器的主要技術指標介紹如下:測量信號:1~5VDC;外給定信號:4
2011-06-22 10:18:59
如何去設計一種基于STM32控制器的模糊PID溫度控制系統呢
模糊PID溫度控制系統的硬件電路包括哪幾部分呢?如何去設計一種基于STM32控制器的模糊PID溫度控制系統呢?
2021-12-23 07:08:20
氣動柔性球關節的模糊PID控制
氣動柔性球關節的模糊PID控制介紹了新型氣動柔性球關節,討論研究其控制方法。綜合模糊控制和PID 控制的特點,設計針對氣動柔性球關節的模糊PID 控制器,實現對球關節彎曲角度、偏轉方向等系統參數
2009-08-08 09:34:49
求教UCGUI模擬器的使用方法
剛剛在STM32上移植UCGUI,用的是固件3.5版本,ILI9341液晶控制器,現在急于驗證一下,結果發現我的板子壞了。求教高手傳我UCGUI模擬器使用方法,越詳細越好。
2015-02-07 21:42:18
請問怎樣去搭建一種模糊控制器系統的數學模型
模糊PID控制方式與傳統PID控制相比有何優勢?怎樣去搭建一種模糊控制器系統的數學模型?如何對模糊控制器系統的數學模型進行仿真?
2021-08-18 07:35:38
采用LabVIEW實現灰水模糊控制系統設計
for G Toolkit)的使用方法,并利用它設計出模糊控制器。結合LabVIEW開發平臺,設計出灰水pH模糊控制系統,實現了對灰水pH的有效控制。 關鍵詞:模糊控制;LabVIEW;模糊邏輯
2019-05-09 09:40:12
模糊系統與模糊控制教程
模糊系統與模糊控制教程共31章,內容包括模糊數學與模糊邏輯中一些對于模糊系統理論有用的概念和原理,模糊系統的各組成部分,設計模糊系統的四種方法,模糊控制與非自適
2009-01-14 22:40:48 0
0
0簡化的模糊PID控制器研究
為了克服常規PID控制器的缺點,提出了一種簡化的模糊PID控制策略。首先利用擴充臨界比例帶法將PID公式簡化為只有一個控制參數Kp,然后通過模糊控制規則和模糊推理確定一張模糊
2009-03-16 09:20:2138
38適用于非線性對象的模糊一神經元控制方法
針對具有嚴重非線性的受控對象,提出了一種模糊一神經元控制方法。該方法將模糊PID控制器與神經元控制器相結合,用于改善控制器控制非線性對象的性能,以誤差、誤差變化率
2009-03-17 10:24:039
9基于模糊專家模型的神經控制器及應用研究
針對具有嚴重非線性特性的聲中和過程,提出了一種基于模糊專家模型的神經控制策略,這種方法將神經網絡逆控制器與神經元PID控制器相結合,并利用模糊專家模型所得到的預報
2009-03-18 08:47:4029
29一種新型的模糊PID控制器介紹
文中將PID控制器在工程整定方法的基礎上,對 PID參數作歸一化處理,然后通過模糊控制規則和模糊推理確定對PID 的參數進行調節,提出了一種新型的模糊PID 算法。從而使 PID 控制器
2009-04-10 10:47:2227
27基于PLC的模糊控制器的設計
通過對模糊控制器設計過程的分析,提出了基于PLC 查表方式實現模糊控制的設計方法。給出了PLC 程序設計的算法流程圖及輸入量量化程序、模糊控制表查詢程序等關鍵步驟的梯
2009-04-10 16:41:5030
30仿人模糊神經網絡控制器的設計和實現
應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-06-09 10:47:3617
17模糊自整定PID 控制器在再熱汽溫控制中的應用研究
針對工業過程中再熱汽溫等一類大遲延慣性時變對象,采用模糊自整定PID 控制器對PID 參數調節和優化,該方法將模糊技術與PID 控制綜合起來,實現了PID 控制的智能化。仿真
2009-06-11 09:20:3530
30多維模糊控制器的設計與軟件編程
模糊控制的設計核心是模糊控制器的設計。為了獲得一般模糊控制器的設計,闡明了模糊控制的原理、模糊控制的特點和重要應用。采用兩個模糊輸入量、一個模糊輸出量的模糊控
2009-06-16 09:53:1318
18魯棒自適應模糊控制器在復雜系統中的應用
在利用T-S 模糊模型對未知函數逼近的基礎上,針對一類含未知非線性函數和外界干擾的復雜系統,設計一種直接魯棒自適應模糊控制器。此控制器學習參數只有一個,工程技術上容
2009-06-18 08:12:2620
20基于融合技術的單級倒立擺模糊控制器
本文提出了一種基于數據融合的模糊控制器設計方法,該方法運用最優控制方法設計融合函數,降低模糊控制器的輸入變量維數,大大減少了模糊控制的規則數,成功的解決了模
2009-06-19 11:21:0214
14模糊控制器在中央空調系統溫度控制中的應用
本文對中央空調系統的模糊控制器的設計做了比較詳盡的論述,并結合MATLAB 仿真軟件對控制系統做了仿真,得到其響應曲線,并與PID 控制方法進行比較,從而得出模糊控制器在中央空
2009-06-22 09:53:2139
39復合模糊控制器在電機調速系統中的應用
設計了一種電機調速系統在復合模糊控制器,采用計算機、A/D、的、D/A和傳感器構成實時數據采集和控制系統。討論了復合模糊控制器的實現和組成、控制策和現實算法。實際應用
2009-06-26 11:12:5324
24基于WinFACT的模糊控制系統設計
本文首先介紹了一種專門用于模糊控制系統設計的WinFACT 軟件系統。詳細 地介紹了利用WinFACT 進行自適應模糊控制系統設計的基本原理以及自適應模糊控制器的軟件程序設計方法。最
2009-06-29 09:34:188
8一種新型仿人智能模糊混合控制器的研究
本文將智能控制算法和PI 控制算法相結合,提出了一種基于PI 的模糊混合控制器。新控制器在控制過程中借助仿人智能算法實現控制參數的在線調整。仿真結果表明,該控制方法對
2009-07-30 15:28:5614
14SCARA機器人自組織模糊聚類神經網絡控制器
本文提出了用于SCARA 機器人運動控制的自組織模糊聚類神經網絡控制器。該控制器基于模糊聚類方法在學習模糊規則之前先優化訓練數據,去除冗余數據并解決數據沖突問題,不但
2009-08-04 15:33:1823
23基于Matlab的模糊PID控制器的設計和仿真
本文以誤差和誤差變化率為輸入,利用模糊推理的方法實現了對PID參數的在線自動整定,并且在MATLAB環境下對該控制器進行了設計和仿真。從仿真結果可以看出,參數自整定模糊P
2009-08-07 08:31:28169
169一種粗糙模糊控制器的設計與仿真
研究了應用粗糙集理論上、下近似定義對模糊控制規則進行拓展設計粗糙模糊控制器的方法,完成了水箱水位粗糙模糊控制器的設計,并分別進行了模糊控制和粗糙模糊控制仿真研
2009-08-10 08:27:0610
10自適應模糊自抗擾控制器的研究與設計
針對普通 PID 在實際工程控制中參數整定難,抗干擾能力差的問題,設計了一種基于模糊控制原理的改進型自抗擾控制器。該控制器充分結合了模糊控制器和自抗擾控制器的各自
2009-08-25 10:26:4311
11Willis混沌系統的模糊滑模控制方法
本文利用模糊邏輯連續滑模控制方法,研究了非線性Willis 混沌系統的受控問題。設計基于模糊邏輯的模糊控制器,通過隸屬函數將滑模面切換函數模糊化,再采用質心法解模糊控
2009-09-09 14:57:085
5通用模糊控制器在PLC上的實現
介紹采用離線計算、在線查表插值的方法實現通用模糊控制器在()* 上實現的設計方法。提出增量式+ 位置式模糊控制輸出算法、帶死區的模糊控制算法以及二元三點插值法來改
2009-11-06 15:41:1421
21變論域模糊控制器的改進及其應用
分析了變論域模糊控制器的優點,同時指出了其存在系統開銷大,實時性差的缺陷,采用了等級劃分的思想對變論域模糊控制器進行了改進。同時將其應用于電機調速系統中,給
2009-12-12 16:21:4318
18仿人模糊神經網絡控制器的設計和實現
應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-12-19 11:50:0312
12時滯系統的模糊反饋推斷控制器設計
針對主要輸出可直接測量的時滯系統,提出一種模糊反饋推斷控制器。該控制器是在典型推斷控制的基礎上進行簡化和改進,并用模糊邏輯和推理來自適應地調節控制器的濾波器時
2010-01-16 17:11:288
8基于遺傳算法和模糊PID的勵磁控制器
隨著電力系統的發展,常規PID 勵磁控制器已經不能滿足系統運行的動態和靜態性能要求,為了克服這一缺點,設計了一種新型模糊PID 控制器,在常規模糊PID 勵磁控制器基礎之上,
2010-01-18 14:46:2023
23基于SCEA的模糊控制器的優化設計研究
有關最優模糊控制器設計的研究已經提出許多年了,也因此而提出了各種各樣的模糊建模方法。該文為模糊建模提出了一種新穎的算法――計劃協同進化算法(Schema Coevolutionary Algorithm-S
2010-02-23 14:13:0711
11一種新型的模糊PID 控制器
文中將PID 控制器在工程整定方法的基礎上,對PID 參數作歸一化處理,然后通過模糊控制規則和模糊推理確定對PID 的參數進行調節,提出了一種新型的模糊PID 算法。從而使PID 控
2010-07-01 16:34:1558
58基于MATLAB模糊邏輯工具箱的模糊控制系統仿真
介紹了用MATLAB模糊邏輯工具箱設計模糊控制器! 并用SIMULANK進行仿真的一般方法" 該方法具有簡便# 直觀# 高效的特點" 最后給出仿真結果"
2010-07-19 17:03:2645
45基于SCEA的模糊控制器的優化設計研究
有關最優模糊控制器設計的研究已經提出許多年了,也因此而提出了各種各樣的模糊建模方法。該文為模糊建模提出了一種新穎的算法――計劃協同進化算法(Schema Coevolutionary Algorithm-S
2010-08-09 15:48:370
0倒立擺的模糊控制研究
倒立擺系統是多變量、非線性、強耦合的控制系統。采用模糊控制理論研究二級倒立擺控制問題。運用最優控制方法設計融合函數以降低模糊控制器的維數,減少模糊控制規則數,
2010-12-29 17:29:0846
46參數自適應模糊PID控制器的設計
參數自適應模糊PID控制器的設計
溫度控制系統中,采用了非線性的隸屬度函數,以模糊控制為粗調、PID為細調。在模糊控制的基礎上,由PI
2009-02-27 09:29:312223
2223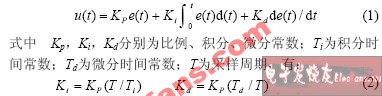
雙模糊控制器的設計實現
在工程實際中,很多被控對象具有時變、非線性的特點,用常規的控制方法難以進行控制或者控制效果不好,為了對這類實際系統進行有效地控制,本文基于模糊控制器的基礎上,設計實現了一種雙模糊控制器,根據實際系統輸出信號的誤差大小利用兩個模糊控制器分別
2011-03-07 11:14:0056
56基于PLC的線性插值模糊控制器的設計
通過對噴淋式除塵系統采用的常規模糊控制器在實際應用中存在的問題進行分析,提出一種分段線性插值的設計方法,并將該方法在模糊控制器中應用。該設計采用PLC及其常規DI/DO模塊
2011-05-03 17:29:5060
60可變論域的模糊自整定控制方法
該文將模糊控制中的可變論域思想和參數模糊自整定方法相結合,提出一種可變論域的模糊自整定控制方法,并將它成功應用在轉臺的速率控制中,為模糊控制在工程中的應用提供了一種新
2011-05-23 15:25:5616
16基于模糊控制的水下潛器沉浮控制方法
文中針對實際要求,提出一種基于自適應模糊控制的水下潛器自動沉浮控制方法。由于模糊控制器的隸屬函數與模糊控制規則的選取對控制效果影響最大,該方法從優化隸屬函數入手
2011-06-10 10:19:111135
1135
高精度模糊PID控制器在溫度控制中的應用
在常規模糊 PID控制器 的基礎上,通過增加模糊控制規則B ,從而構成變積分系數的模糊PID 控制器,通過在線調整積分系數,間接調整常規模糊控制器的模糊控制規則,以改善其性能。本文提出
2011-06-17 17:19:4198
98基于Lonworks總線的模糊控制器實現
介紹了一種基于Lonworks現場總線的模糊控制器的實現方法 該方法采用多級遞階控制結構,利用LON技術提供的DDE 建立現場設備與PC 主機的動態通道,實現現場設備控制 該技術充分利用了
2011-06-18 17:14:0617
17模糊溫度控制器的設計與Matlab仿真
針對溫度控制系統的時變、滯后等非線性特性及控制比較復雜的問題,提出了一種模糊控制方案以改善系統的控制性能. 該方案采用mamdani推理型模糊控制器代替傳統的PID控制器,依據模糊
2011-09-13 10:59:32131
131模糊溫度控制器的設計及其Matlab仿真
針對溫度控制系統的時變、滯后等非線性特性及控制比較復雜的問題提出了一種模糊控制方案以改善系統的控制性能. 該方案采用mamdani推理型模糊控制器代替傳統的PID控制器依據模糊
2011-09-14 15:30:2656
56多分區解析式模糊控制器的設計方法
一種基于多分區的模糊控制決策的方法,它是在四分區解析式方法的基礎上而提出的,也即五分區解析式方法。該方法除具有響應速度快以外,還具有收斂時間短、拉制精度高的特點
2011-09-27 14:42:3220
20
基于Matlab模糊控制器HDL代碼的自動生成
該方法分4個步驟:(1)利用Matlab的Fuzzy Logic工具箱設計模糊控制器。(2)將模糊控制器轉換為Lookup Table的形式。(3)將制作好的控制器查找表用狀態機實現。(4)用HDL Coder將狀態機實現的模糊控制
2012-01-11 10:27:5130
30一種簡化PID模糊控制器的研究與設計
在介紹模糊控制基本原理及模糊控制器設計與分類的基礎上,推導出一種簡化PID型模糊控制器。為了驗證簡化PID型模糊控制器的性能,將其與PD及 PI型模糊控制器進行比較。其仿真結果最
2013-02-21 15:56:0054
54基于分層模糊系統的自適應H∞控制器設計
針對具有參數不確定性特點的高超聲速飛行器輸出跟蹤問題,提出了一種基于分層模糊系統的自適應H控制器的設計方法。為了解決模糊控制器中規則數目隨系統變量個數呈指數增長的問題,減少在線辨識參數的數量,增強
2018-01-02 18:30:150
0基于MATLAB模糊控制系統仿真
模糊控制器的設計參數主要有:各輸入、輸出變量模糊子集的隸屬度函數,模糊控制規則,輸入輸出變量的比例變換因子等。要依據設計者的經驗和反復調試才能設計出一個比較好的模糊控制器。預先采用計算機仿真方法
2018-03-28 15:42:0535
35模糊pid控制器在選礦工業控制中的應用
模糊控制(Fuzzy Control-FC)又稱為模糊邏輯語言變量控制,簡稱為模糊控制或稱為模糊邏輯控制(FLC),是以模糊集合論,模糊語言變量及模糊邏輯推理為基礎的計算機智能控制。模糊控制的核心部分為模糊控制器,模糊控制器的控制規則由計算機程序實現。圖1為模糊控制原理圖。
2018-12-13 09:15:003542
3542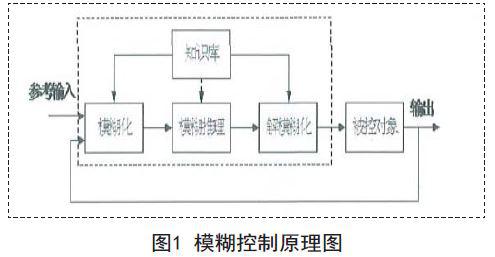
通過采用參數模糊自整定PID控制器提高儀器溫度控制系統的性能
利用模糊控制規則在線對PID控制器進行參數修整,便構成參數模糊自整定PID控制器,其工作過程為:首先,將控制量的偏差e和偏差變化率ec作為二維模糊控制器的輸入變量,進行模糊化處理;其次,對模糊
2020-05-03 10:40:004853
4853





 工商網監
工商網監
評論