的實(shí)時(shí)運(yùn)動(dòng)控制,才能保證設(shè)備的平穩(wěn)運(yùn)行以及實(shí)現(xiàn)其他多樣的功能。 ? 想要實(shí)現(xiàn)精密的運(yùn)動(dòng)控制或者實(shí)時(shí)控制,涉及三個(gè)基礎(chǔ)的子系統(tǒng),感應(yīng)、處理和驅(qū)動(dòng)。這三個(gè)高性能系統(tǒng)的緊密配合,電機(jī)設(shè)備才能準(zhǔn)確無(wú)誤的精準(zhǔn)運(yùn)行,還能大大
2023-04-19 00:17:00 1485
1485 
工業(yè)運(yùn)動(dòng)控制涵蓋一系列應(yīng)用,包括基于逆變器的風(fēng)扇或泵控制、具有更為復(fù)雜的交流驅(qū)動(dòng)控制的工廠(chǎng)自動(dòng)化以及高級(jí)自動(dòng)化應(yīng)用(如具有高級(jí)伺服控制的機(jī)器人)。這些系統(tǒng)需要檢測(cè)和反饋多個(gè)變量,例如電機(jī)繞組電流或
2019-08-08 07:02:47
健康監(jiān)測(cè)(SHM)、農(nóng)業(yè)設(shè)備中的主動(dòng)側(cè)翻保護(hù)(ARP)、機(jī)器人位置感知和控制、太陽(yáng)能電池板安裝和跟蹤器、工業(yè)機(jī)械底盤(pán)調(diào)平、精密水準(zhǔn)儀。在這些應(yīng)用中,平均加速度始終接近地球重力(g = 9.81 m
2023-09-08 07:03:21
PSoC中通用工業(yè)步進(jìn)電機(jī)驅(qū)動(dòng)器的控制應(yīng)用電路。步進(jìn)電機(jī)是一種無(wú)刷機(jī)電設(shè)備,可將電脈沖轉(zhuǎn)換為離散的機(jī)械運(yùn)動(dòng)。步進(jìn)電機(jī)的旋轉(zhuǎn)分為幾個(gè)步驟,稱(chēng)為微步。采用微步進(jìn)控制技術(shù)實(shí)現(xiàn)步進(jìn)電機(jī)控制系統(tǒng)的高位精度
2020-04-23 06:41:20
連接到工廠(chǎng)網(wǎng)絡(luò)中,以便通過(guò)協(xié) 調(diào)多個(gè)驅(qū)動(dòng)器運(yùn)行而改善效率。高效運(yùn)動(dòng)控制: 精確隔離和通信精確運(yùn)動(dòng)控制加上精確通信時(shí)序,可縮短機(jī)器生產(chǎn)周期,降低生產(chǎn)每個(gè)部件所消耗的能源。由于設(shè)備的資本投入,這一點(diǎn)在機(jī)器
2018-11-01 10:50:42
是使用諸如Ethernet/IP或Modbus TCP等工業(yè)以太網(wǎng)協(xié)議將驅(qū)動(dòng)器連接到工廠(chǎng)網(wǎng)絡(luò)中,以便通過(guò)協(xié) 調(diào)多個(gè)驅(qū)動(dòng)器運(yùn)行而改善效率。 高效運(yùn)動(dòng)控制: 精確隔離和通信精確運(yùn)動(dòng)控制加上精確通信時(shí)序,可縮短
2018-09-17 15:33:41
的短路電流電平、更小的芯片尺寸,以及更低的熱容量和短路耐受時(shí)間。這凸顯了柵極驅(qū)動(dòng)器電路以及過(guò)流檢測(cè)和保護(hù)功能的重要性。今天我們會(huì)討論現(xiàn)代工業(yè)電機(jī)驅(qū)動(dòng)中成功可靠地實(shí)現(xiàn)短路保護(hù)的問(wèn)題,同時(shí)提供三相電機(jī)控制
2021-08-12 07:00:00
的短路電流電平、更小的芯片尺寸,以及更低的熱容量和短路耐受時(shí)間。這凸顯了柵極驅(qū)動(dòng)器電路以及過(guò)流檢測(cè)和保護(hù)功能的重要性。今天我們會(huì)討論現(xiàn)代工業(yè)電機(jī)驅(qū)動(dòng)中成功可靠地實(shí)現(xiàn)短路保護(hù)的問(wèn)題,同時(shí)提供三相電機(jī)控制
2019-04-29 00:48:47
運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱(chēng)為通用運(yùn)動(dòng)控制(GMC)。運(yùn)動(dòng)控制被廣泛應(yīng)用在包裝、印刷、紡織和裝配工業(yè)中。運(yùn)動(dòng)控制就是對(duì)機(jī)械運(yùn)動(dòng)部件的位置、速度等進(jìn)行實(shí)時(shí)的控制管理,使其按照預(yù)期的運(yùn)動(dòng)軌跡和規(guī)定的運(yùn)動(dòng)參數(shù)
2016-05-07 19:22:19
運(yùn)動(dòng)控制卡是什么?運(yùn)動(dòng)控制卡有何功能?伺服驅(qū)動(dòng)器是什么?伺服驅(qū)動(dòng)器有哪幾種控制方式?
2021-10-09 08:17:42
本帖最后由 MMMMMMCc 于 2020-3-10 17:39 編輯
我畢設(shè)就是這個(gè),運(yùn)動(dòng)控制卡控制伺服驅(qū)動(dòng)器,但是目前沒(méi)有設(shè)備只能看說(shuō)明書(shū),所以想問(wèn)一下有沒(méi)有大佬做過(guò)類(lèi)似的項(xiàng)目,想知道驅(qū)動(dòng)器都需要設(shè)置哪些參數(shù),謝謝。
2020-03-10 17:37:42
目錄前言運(yùn)動(dòng)控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動(dòng)自動(dòng)控制系統(tǒng)——運(yùn)動(dòng)控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時(shí)工業(yè)運(yùn)動(dòng)控制——電機(jī)選擇,驅(qū)動(dòng)器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
運(yùn)動(dòng)控制主要涉及步進(jìn)電機(jī)、伺服電機(jī)的控制,控制結(jié)構(gòu)模式一般是:控制裝置+驅(qū)動(dòng)器+(步進(jìn)或伺服)電機(jī)。控制裝置可以是PLC系統(tǒng),也可以是專(zhuān)用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。PLC系統(tǒng)作為控制
2022-03-03 15:43:50
和靈活性,可實(shí)時(shí)完成運(yùn)動(dòng)控制過(guò)程中復(fù)雜的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運(yùn)動(dòng)控制器的核心部件,設(shè)計(jì)了通用型運(yùn)動(dòng)控制器。其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制
2019-07-31 08:15:26
什么是運(yùn)動(dòng)控制?運(yùn)動(dòng)控制系統(tǒng)是由哪些部分構(gòu)成的?驅(qū)動(dòng)器的工作模式有哪幾種?
2021-10-11 07:56:21
FOC電路板有何特點(diǎn)?FOC控制驅(qū)動(dòng)器的原理是什么?
2021-12-21 06:00:03
求助。我想用PIC16F877A發(fā)送脈沖和方向。控制電機(jī)。驅(qū)動(dòng)器是24V步電機(jī)驅(qū)動(dòng)器。一個(gè)步進(jìn)電機(jī)。不知道怎么實(shí)現(xiàn)。是否還需要其他芯片。需各位大蝦幫助。最好給小弟一個(gè)原理圖看看。
2012-03-05 14:29:31
什么是運(yùn)動(dòng)控制卡?運(yùn)動(dòng)控制卡與驅(qū)動(dòng)器有什么不同?PLC控制好還是運(yùn)動(dòng)控制卡控制好?
2021-10-09 07:56:29
過(guò)程自動(dòng)化、工廠(chǎng)自動(dòng)化或運(yùn)動(dòng)控制中的工業(yè)通信是通過(guò)現(xiàn)場(chǎng)總線(xiàn)技術(shù)來(lái)實(shí)現(xiàn)的。現(xiàn)場(chǎng)總線(xiàn)是指使用一系列媒介的工業(yè)通信系統(tǒng),例如:銅質(zhì)線(xiàn)纜、光纖或無(wú)線(xiàn)鏈接,并采用比特串行傳輸技術(shù)將分布式現(xiàn)場(chǎng)器件(傳感器、傳動(dòng)器、驅(qū)動(dòng)器和變送器等等)耦合至中心控制系統(tǒng)或管理系統(tǒng)。
2020-05-04 07:26:53
這項(xiàng)工作是由加州州立理工大學(xué)波莫納分校、C3SR的產(chǎn)學(xué)合作課程設(shè)計(jì)項(xiàng)目。該項(xiàng)目的目標(biāo)是創(chuàng)建一個(gè)通用的運(yùn)動(dòng)控制器,與任何運(yùn)動(dòng)控制系統(tǒng)或設(shè)備兼容,解決工業(yè)和開(kāi)源運(yùn)動(dòng)控制器中的問(wèn)題,同時(shí)也相對(duì)便宜
2021-01-07 17:17:14
使用控制算法來(lái)控制伺服器的運(yùn)動(dòng)。
此外,對(duì)于這種通信鏈接的延申應(yīng)用,可以考慮以下幾個(gè)方面:多軸控制。通過(guò)Profinet轉(zhuǎn)CanOpen網(wǎng)關(guān)連接多臺(tái)伺服驅(qū)動(dòng)器,可以實(shí)現(xiàn)多軸控制,提高生產(chǎn)效率。運(yùn)動(dòng)控制算法
2024-01-10 10:29:22
SMART控制的驅(qū)動(dòng)器自動(dòng)運(yùn)行時(shí)如何實(shí)現(xiàn)伺服電機(jī)反轉(zhuǎn)的
2024-01-10 06:30:14
Trinamic將數(shù)字信息轉(zhuǎn)換為物理動(dòng)作,以?xún)?yōu)化從獨(dú)立應(yīng)用程序到互聯(lián)同步驅(qū)動(dòng)器的操作效率。其業(yè)界領(lǐng)先的電機(jī)及運(yùn)動(dòng)控制方案,將先進(jìn)的診斷技術(shù)與實(shí)時(shí)通訊相結(jié)合,推動(dòng)了工業(yè)的不斷進(jìn)步。智能執(zhí)行器與智能
2022-09-06 14:26:51
`有哪位大神了解怎么用VB控制驅(qū)動(dòng)器動(dòng)作?我買(mǎi)了塊研華公司的運(yùn)動(dòng)控制卡PCI-1243U,不了解怎么用里面的VB例程控制驅(qū)動(dòng)器,進(jìn)而伺服電機(jī)動(dòng)作!`
2015-10-24 11:50:40
本文作者利用黃石市科威自控有限公司的嵌入式plc芯片組,設(shè)計(jì)出了kp3-05m06r型運(yùn)動(dòng)控制器。該控制器集plc、can總線(xiàn)、rs485/232等功能于一體,與步進(jìn)驅(qū)動(dòng)器或伺服驅(qū)動(dòng)器配套使用,具有
2019-08-16 08:34:13
用于LTC2377-20的DC精密驅(qū)動(dòng)器可實(shí)現(xiàn)2ppm線(xiàn)性度
2021-02-02 07:54:49
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動(dòng)控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動(dòng)器 ?
2021-06-28 08:03:17
就運(yùn)動(dòng)控制而言,以太網(wǎng)、現(xiàn)場(chǎng)總線(xiàn)以及其他技術(shù)(如外圍組件互連)歷來(lái)都是相互競(jìng)爭(zhēng)的,用以在工業(yè)自動(dòng)化和控制系統(tǒng)中獲得對(duì)一些最苛刻要求的工作負(fù)載的處理權(quán)限。運(yùn)動(dòng)控制應(yīng)用要求確定性(保證網(wǎng)絡(luò)能夠及時(shí)將工作
2019-07-30 06:20:12
可以同時(shí)適應(yīng)商業(yè)和工業(yè)應(yīng)用。
2. 確定性適用于運(yùn)動(dòng)控制應(yīng)用
運(yùn)動(dòng)控制依賴(lài)于精確通信。這種精確性通過(guò)使用基于時(shí)隙的調(diào)度來(lái)支持,每個(gè)設(shè)備在調(diào)度策略中都有一個(gè)與其它設(shè)備進(jìn)行通信的調(diào)度表。這些伺服驅(qū)動(dòng)器
2018-10-24 09:45:48
和工業(yè)應(yīng)用。2. 確定性適用于運(yùn)動(dòng)控制應(yīng)用運(yùn)動(dòng)控制依賴(lài)于精確通信。這種精確性通過(guò)使用基于時(shí)隙的調(diào)度來(lái)支持,每個(gè)設(shè)備在調(diào)度策略中都有一個(gè)與其它設(shè)備進(jìn)行通信的調(diào)度表。這些伺服驅(qū)動(dòng)器和控制器計(jì)算出它們各自
2018-10-11 17:45:35
伺服驅(qū)動(dòng)器裝哪里?裝在電機(jī)上嗎還是電機(jī)外面?用stm32控制電機(jī),那么驅(qū)動(dòng)器干嘛用?求大神解答,樓主在做畢業(yè)設(shè)計(jì)
2016-04-13 15:03:34
伺服驅(qū)動(dòng)器與伺服電機(jī)怎么連接?如何實(shí)現(xiàn)伺服驅(qū)動(dòng)器的基本控制?
2021-09-28 08:29:01
伺服驅(qū)動(dòng)器工作原理伺服驅(qū)動(dòng)器控制方式
2021-02-05 07:05:04
各位前輩好,我想問(wèn)個(gè)問(wèn)題。我電腦接了個(gè)運(yùn)動(dòng)控制卡,連接伺服驅(qū)動(dòng)器,驅(qū)動(dòng)器連接伺服電機(jī)。電機(jī)通過(guò)編碼器把數(shù)據(jù)反饋給了驅(qū)動(dòng)器,驅(qū)動(dòng)器在內(nèi)部構(gòu)成了閉環(huán)。問(wèn)題來(lái)了,我能不能不加其他編碼器,就通過(guò)
2017-12-19 21:48:30
。大批量生產(chǎn)線(xiàn)所用的專(zhuān)用加工中心甚至包括更多的伺服驅(qū)動(dòng)器,支持多個(gè)金屬加工并行操作和類(lèi)機(jī)器人功能,使加工過(guò)程實(shí)現(xiàn)完全自動(dòng)化。機(jī)器設(shè)計(jì)人員面臨的挑戰(zhàn)是如何讓多個(gè)伺服驅(qū)動(dòng)軸的操作和運(yùn)動(dòng)方案同步,從而在維持
2020-07-01 08:00:00
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來(lái),工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來(lái)越高,為了滿(mǎn)足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于A(yíng)RM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線(xiàn)型,CAN總線(xiàn)型等,通過(guò)編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。北京偉恩斯技術(shù)有限公司...
2021-08-31 08:29:03
、地址總線(xiàn)與數(shù)據(jù)總線(xiàn),與微處理器uC連接,用于接收微處理器控制指令。其中外部接口OUTx、DIRx是每個(gè)運(yùn)動(dòng)軸的脈沖PU和方向DIR輸出,接電機(jī)驅(qū)動(dòng)器,然后電機(jī)驅(qū)動(dòng)器接到電機(jī)上即可,電機(jī)帶動(dòng)運(yùn)動(dòng)結(jié)構(gòu)可以
2020-04-15 14:35:51
傳感器是數(shù)據(jù)收集,系統(tǒng)監(jiān)測(cè)和控制反饋的重要組成部分。在運(yùn)動(dòng)控制應(yīng)用中,傳感器采用旋轉(zhuǎn)或直線(xiàn)編碼器進(jìn)行位置反饋,傳感器(如用于速度傳感的轉(zhuǎn)速計(jì)),甚至接近開(kāi)關(guān)來(lái)啟動(dòng)或停止某些機(jī)器動(dòng)作。例如在液壓運(yùn)動(dòng)
2018-11-12 11:47:37
操作,并且為機(jī)器中每個(gè)伺服電機(jī)軸產(chǎn)生運(yùn)動(dòng)軌跡規(guī)劃。每個(gè)伺服驅(qū)動(dòng)器包括多個(gè)控制環(huán)路來(lái)管理機(jī)械系統(tǒng)動(dòng)態(tài)特性、電磁扭矩產(chǎn)生和電路動(dòng)態(tài)特性。各控制元件的性能對(duì)機(jī)器吞吐效率和表面處理質(zhì)量至關(guān)重要。計(jì)算機(jī)輔助制造
2018-10-22 16:50:51
編程邏輯控制器(PLC)管理機(jī)器操作,并且為機(jī)器中每個(gè)伺服電機(jī)軸產(chǎn)生運(yùn)動(dòng)軌跡規(guī)劃。每個(gè)伺服驅(qū)動(dòng)器包括多個(gè)控制環(huán)路來(lái)管理機(jī)械系統(tǒng)動(dòng)態(tài)特性、電磁扭矩產(chǎn)生和電路動(dòng)態(tài)特性。各控制元件的性能對(duì)機(jī)器吞吐效率和表面處理
2018-10-10 18:13:01
AMIS305XXGEVK,基于305XX系列的工業(yè)步進(jìn)電機(jī)驅(qū)動(dòng)器評(píng)估套件。該套件包含從PC控制AMIS-305xx微步進(jìn)步進(jìn)電機(jī)驅(qū)動(dòng)器所需的所有必需硬件和軟件。用戶(hù)友好的圖形用戶(hù)界面(GUI)使
2020-05-20 07:43:35
多軸伺服控制同步精密運(yùn)動(dòng) 精密加工是一個(gè)多步驟過(guò)程,先是粗略切削,然后經(jīng)過(guò)多道精細(xì)切削才能達(dá)到要求。多個(gè)電機(jī)驅(qū)動(dòng)進(jìn)給主軸和多個(gè)絲杠來(lái)定位工具頭。電機(jī)位置與速度伺服驅(qū)動(dòng)器的功率和剛度決定了支持特定表面
2016-01-25 16:48:48
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線(xiàn)型,CAN總線(xiàn)型等,通過(guò)編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 07:06:14
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
2021-01-27 07:45:40
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
如何對(duì)MQTT協(xié)議棧進(jìn)行移植并驗(yàn)證呢?如何去實(shí)現(xiàn)MQTT協(xié)議棧對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)器的控制呢?
2021-11-04 07:45:48
工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)怎么選?這些問(wèn)題你要弄明白
2021-01-21 07:59:21
本帖最后由 rabbitsir 于 2015-5-22 23:35 編輯
本人LabVIEW小白,但試驗(yàn)中可能需要用到利用LabVIEW控制該交流運(yùn)動(dòng)驅(qū)動(dòng)器實(shí)現(xiàn)點(diǎn)擊正弦運(yùn)動(dòng),因此希望有做過(guò)運(yùn)動(dòng)
2015-05-22 19:12:32
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線(xiàn)型,CAN總線(xiàn)型等,通過(guò)編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 08:09:29
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線(xiàn)型,CAN總線(xiàn)型等,通過(guò)編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-07-08 08:27:33
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線(xiàn)型,CAN總線(xiàn)型等,通過(guò)編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 07:06:25
怎么樣通過(guò)MSP430控制驅(qū)動(dòng)器,然后由驅(qū)動(dòng)器控制大電機(jī)??
2014-01-28 19:46:48
怎么用Labview直接控制伺服驅(qū)動(dòng)器?是通過(guò)接口向伺服驅(qū)動(dòng)器輸入指令代碼嗎?我在說(shuō)明書(shū)上沒(méi)看到上位機(jī)控制的例子,求大神解惑。
2016-04-14 23:43:49
在現(xiàn)代的工業(yè)控制、車(chē)輛運(yùn)動(dòng)和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動(dòng)系統(tǒng)的應(yīng)用越來(lái)越多,在這些系統(tǒng)中懸掛運(yùn)動(dòng)部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動(dòng)精確性是整個(gè)系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動(dòng)
2019-08-12 08:21:38
怎樣實(shí)現(xiàn)LabVIEW程序?qū)︸R達(dá)的控制,中間接了一個(gè)D2驅(qū)動(dòng)器,它們之間的連線(xiàn)應(yīng)該怎么樣?求幫忙解答
2015-08-04 10:31:30
大部分驅(qū)動(dòng)器都是脈沖控制,怎么通過(guò)電壓控制驅(qū)動(dòng)器
2023-10-12 06:00:22
IGBT/功率MOSFET是一種電壓控制型器件,可用作電源電路、電機(jī)驅(qū)動(dòng)器和其它系統(tǒng)中的開(kāi)關(guān)元件。柵極是每個(gè)器件的電氣隔離控制端。MOSFET的另外兩端是源極和漏極,而對(duì)于IGBT,它們被稱(chēng)為集電極
2021-01-27 07:59:24
程師能夠在使用較小電路板面積的同時(shí),實(shí)現(xiàn)更加可靠并具有高性?xún)r(jià)比的工業(yè)設(shè)備設(shè)計(jì)。 該新款輸出驅(qū)動(dòng)器為滿(mǎn)足對(duì)可配置程度較高的工業(yè)自動(dòng)化控制器日益增長(zhǎng)的需求而設(shè)計(jì),可提供擴(kuò)展的診斷功能,如故障檢測(cè)以及增強(qiáng)的感
2019-07-01 07:08:17
步進(jìn)驅(qū)動(dòng)器細(xì)分控制原理是什么?步進(jìn)電機(jī)的相數(shù)與步進(jìn)電機(jī)細(xì)分的關(guān)系是什么?步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置細(xì)分的方法有哪些?
2021-10-27 06:23:18
多種電機(jī)驅(qū)動(dòng):脈沖電機(jī),變頻電機(jī),安川電機(jī)■多達(dá)3個(gè)網(wǎng)口,支持ETHERCAT工業(yè)總線(xiàn)設(shè)備■ECNC運(yùn)動(dòng)控制SDK軟件包,輕松實(shí)現(xiàn)工業(yè)控制所需功能■可用于機(jī)器視覺(jué)處理,加工中心,精雕機(jī)器,機(jī)器人系統(tǒng)等工業(yè)應(yīng)用領(lǐng)域P...
2021-09-07 07:26:54
浙江回收三菱伺服驅(qū)動(dòng)器 松下伺服驅(qū)動(dòng)器 伺服電機(jī) 回收三菱,F(xiàn)ANUC 西門(mén)子,安川,松下,發(fā)那科等進(jìn)口伺服驅(qū)動(dòng)器回收變頻器回收PLC回收觸摸屏三菱變頻器浙江回收各種除塵裝置,例如兩臺(tái)鋁磨床車(chē)身內(nèi)
2021-05-28 10:27:39
浙江回收三菱伺服驅(qū)動(dòng)器 松下伺服驅(qū)動(dòng)器 伺服電機(jī) 回收三菱,F(xiàn)ANUC 西門(mén)子,安川,松下,發(fā)那科等進(jìn)口伺服驅(qū)動(dòng)器回收變頻器回收PLC回收觸摸屏三菱變頻器浙江回收各種除塵裝置,例如兩臺(tái)鋁磨床車(chē)身內(nèi)
2021-05-27 12:17:36
的短路電流電平、更小的芯片尺寸,以及更低的熱容量和短路耐受時(shí)間。這凸顯了柵極驅(qū)動(dòng)器電路以及過(guò)流檢測(cè)和保護(hù)功能的重要性。本文討論現(xiàn)代工業(yè)電機(jī)驅(qū)動(dòng)中成功可靠地實(shí)現(xiàn)短路保護(hù)的問(wèn)題,同時(shí)提供三相電機(jī)控制應(yīng)用中隔離式柵極驅(qū)動(dòng)器的實(shí)驗(yàn)性示例。
2021-01-25 06:43:37
電機(jī)驅(qū)動(dòng)器主要可以分為兩種,數(shù)字式的驅(qū)動(dòng)器和非數(shù)字式的驅(qū)動(dòng)器: 數(shù)字式的基本上依靠總線(xiàn)通訊,通過(guò)讀寫(xiě)驅(qū)動(dòng)器上的控制器的寄存器或者RAM來(lái)實(shí)現(xiàn)數(shù)據(jù)交換。在上層就只需要發(fā)送簡(jiǎn)單的控制參數(shù)就可以了(例如
2021-09-07 08:40:47
電機(jī)驅(qū)動(dòng)器輸出電流不夠,可能由哪些原因造成,求助大家來(lái)指點(diǎn)一下。驅(qū)動(dòng)器檔位調(diào)節(jié)至2A,但實(shí)際電機(jī)運(yùn)動(dòng)時(shí),電流只有0.3A左右。求助大家來(lái)討論指點(diǎn)一下,謝謝啦。
2017-09-01 17:38:56
Ethernet/IP或Modbus TCP等工業(yè)以太網(wǎng)協(xié)議將驅(qū)動(dòng)器連接到工廠(chǎng)網(wǎng)絡(luò)中,以便通過(guò)協(xié) 調(diào)多個(gè)驅(qū)動(dòng)器運(yùn)行而改善效率。高效運(yùn)動(dòng)控制: 精確隔離和通信精確運(yùn)動(dòng)控制加上精確通信時(shí)序,可縮短機(jī)器生產(chǎn)周期,降低
2018-10-25 10:06:50
有沒(méi)有人用過(guò),研華PCI1240U運(yùn)動(dòng)控制卡 控制 雷賽ACS806驅(qū)動(dòng)器給點(diǎn)經(jīng)驗(yàn)
2020-02-25 13:56:32
`項(xiàng)目背景隨著電機(jī)行業(yè)的飛速發(fā)展,電機(jī)測(cè)試項(xiàng)目越來(lái)越多,電機(jī)行業(yè)當(dāng)前需要對(duì)電機(jī)與驅(qū)動(dòng)器進(jìn)行完整的測(cè)試與性能分析,可是傳統(tǒng)的測(cè)功機(jī)是無(wú)法做到的,西安一所高校找到納米軟件,希望通過(guò)控制精密運(yùn)動(dòng)控制器實(shí)現(xiàn)
2021-01-12 14:02:12
伺服驅(qū)動(dòng)器中可以集成多少種電機(jī)驅(qū)動(dòng)控制電路?
2023-10-08 07:07:48
精密運(yùn)動(dòng)控制器LM628的應(yīng)用設(shè)計(jì)
LM628是美國(guó)國(guó)家半導(dǎo)體公司生產(chǎn)的專(zhuān)用精密運(yùn)動(dòng)控制器集成芯片,本文介紹了該芯片的結(jié)
2009-02-09 09:45:562234 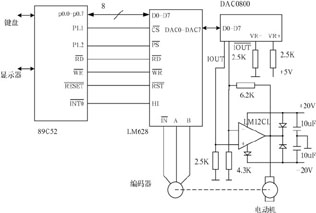
Aerotech推出的XC2 PWM數(shù)字驅(qū)動(dòng)器是一款高性能小型單軸電機(jī)驅(qū)動(dòng)器,專(zhuān)為運(yùn)動(dòng)控制應(yīng)用而設(shè)計(jì)。它能與使用HyperWire?運(yùn)動(dòng)總線(xiàn)的Automation 3200運(yùn)動(dòng)平臺(tái)兼容。
2019-07-19 17:51:071248 精密ADC驅(qū)動(dòng)器工具
2021-02-03 10:52:12 2
2 MT-074: 精密ADC用差分驅(qū)動(dòng)器
2021-03-21 01:32:353 機(jī)器和設(shè)備的自主運(yùn)動(dòng)一直是人類(lèi)的夢(mèng)想。由于對(duì)機(jī)械充滿(mǎn)熱情的天才們對(duì)機(jī)械裝置的發(fā)現(xiàn)和發(fā)明,過(guò)去的夢(mèng)想得以實(shí)現(xiàn)。當(dāng)然,今天的技術(shù)允許在宏觀(guān)力學(xué)和微觀(guān)力學(xué)領(lǐng)域進(jìn)行高度復(fù)雜的驅(qū)動(dòng)。這些驅(qū)動(dòng)器廣泛用于工業(yè)
2022-08-08 09:42:43435 
在汽車(chē)和工業(yè)系統(tǒng)創(chuàng)新以及生產(chǎn)技術(shù)進(jìn)步的推動(dòng)下,伺服驅(qū)動(dòng)器、電機(jī)和控制它們的設(shè)備代表了持續(xù)的增長(zhǎng)機(jī)會(huì)。預(yù)計(jì)到 2022 年,汽車(chē)和運(yùn)輸行業(yè)將占伺服電機(jī)和驅(qū)動(dòng)器銷(xiāo)售額的最大份額,直到 2022 年。對(duì)伺服驅(qū)動(dòng)器、控制器和電機(jī)的需求仍然強(qiáng)勁,以幫助公司提高工業(yè)環(huán)境的效率。
2022-08-09 09:33:10320 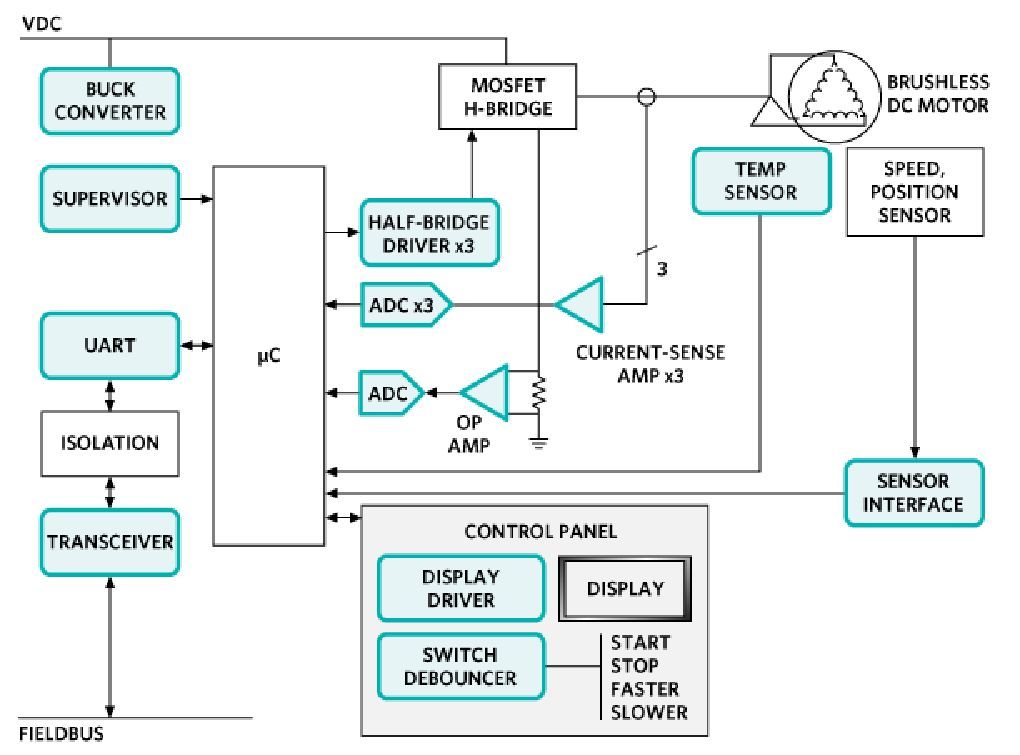
今天,正運(yùn)動(dòng)小助手給大家分享一下運(yùn)動(dòng)控制器軸回零的配置與實(shí)現(xiàn)。本文主要介紹控制器提供的回零模式,驅(qū)動(dòng)器自身的回零模式我們將在下篇為大家講解。
2022-11-12 14:25:47922 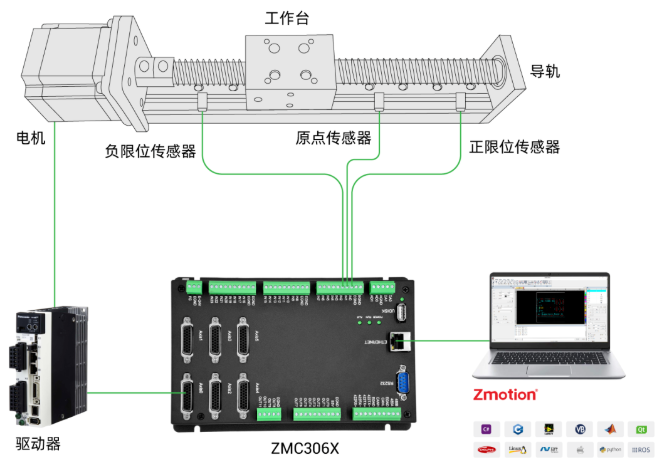
上節(jié)課程,正運(yùn)動(dòng)小助手給大家分享了運(yùn)動(dòng)控制器提供的回零模式配置與實(shí)現(xiàn)。本節(jié)課程主要介紹控制器實(shí)現(xiàn)EtherCAT與RTEX驅(qū)動(dòng)器的回零及其配置。
2022-11-16 17:07:10845 
正運(yùn)動(dòng)控制器提供自己的回零模式,也支持使用EtherCAT總線(xiàn)驅(qū)動(dòng)器提供的回零模式,或RTEX總線(xiàn)驅(qū)動(dòng)器的提供的回零模式,均可使用DATUM指令實(shí)現(xiàn)回零
2022-11-29 15:22:431192 精密運(yùn)動(dòng)控制實(shí)現(xiàn)自動(dòng)化
2023-01-05 09:43:37665 
什么是超精密運(yùn)動(dòng)控制技術(shù)? 超精密運(yùn)動(dòng)控制技術(shù)是一門(mén)集精密機(jī)械、精密控制、精密驅(qū)動(dòng)、精密傳感、精密測(cè)量、精密集成技術(shù)于一體,實(shí)現(xiàn)在納米精度范圍內(nèi)的運(yùn)動(dòng)控制的綜合技術(shù),也是三英精控最主要的核心技術(shù)
2023-01-12 11:22:592002 關(guān)于壓電陶瓷驅(qū)動(dòng)器 壓電陶瓷驅(qū)動(dòng)器有著納米級(jí)定位分辨率,阻滯力大,剛度高,響應(yīng)速度快,尺寸小,重量輕等優(yōu)點(diǎn)而被廣泛的應(yīng)用于各種需要超高精度運(yùn)動(dòng)定位的場(chǎng)合之中。由于單片壓電陶瓷所能輸出的力和位移都比
2023-02-03 14:34:241341 項(xiàng)目需求 利用運(yùn)動(dòng)控制卡,快速搭建運(yùn)動(dòng)控制平臺(tái)。所需硬件:個(gè)人電腦;正運(yùn)動(dòng)控制卡;艾思控驅(qū)動(dòng)器;鳴志直流無(wú)刷電機(jī)。軟件平臺(tái):python 硬件介紹 正運(yùn)動(dòng)控制卡 控制卡用于接收PC的運(yùn)動(dòng)指令,然后
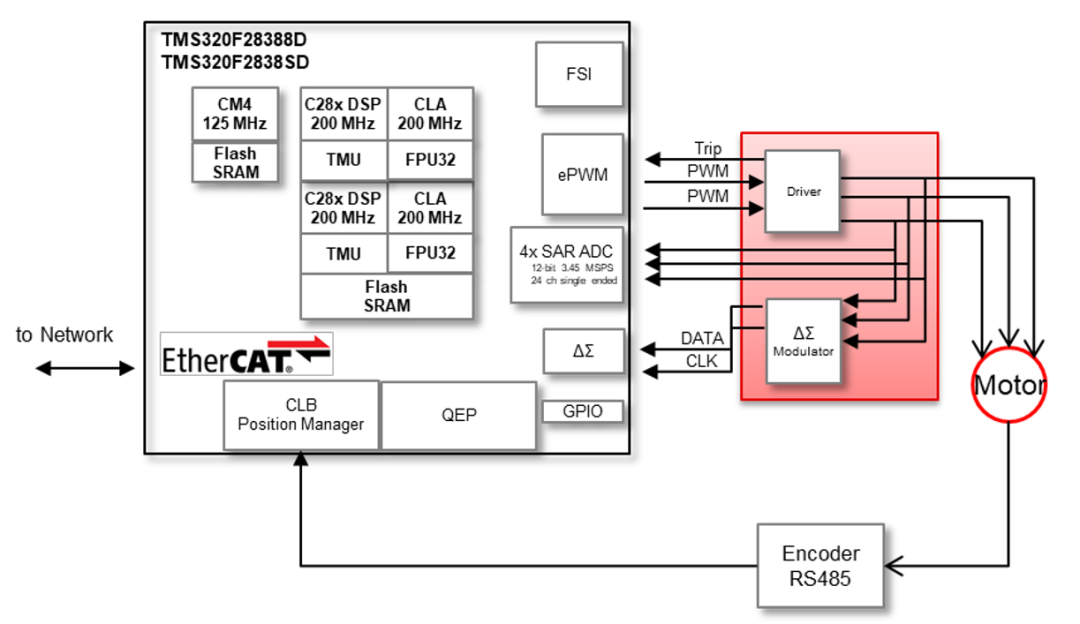
2023-03-10 10:01:130 工業(yè)驅(qū)動(dòng)器的諸多方面都對(duì)實(shí)現(xiàn)精密的運(yùn)動(dòng)控制很重要,精密運(yùn)動(dòng)控制涉及實(shí)時(shí)控制設(shè)計(jì)中的三個(gè)基礎(chǔ)子系統(tǒng),即感應(yīng)、處理和驅(qū)動(dòng)。 本文將論述各個(gè)子系統(tǒng)的支持技術(shù)示例
2023-04-04 09:52:04368 缺乏精密的位置和速度感應(yīng),就無(wú)法實(shí)現(xiàn)精密的運(yùn)動(dòng)控制。感應(yīng)可以包括電機(jī)軸角位置和速度感應(yīng)或傳送帶線(xiàn)性位置和速度感應(yīng)。設(shè)計(jì)人員經(jīng)常使用增量式光學(xué)編碼器,每轉(zhuǎn)有幾百到一千個(gè)槽,以感應(yīng)位置和速度。這些編碼器通常通過(guò)正交編碼脈沖 (QEP) 連接到微控制器 (MCU),因此需要 QEP 接口功能。
2023-04-19 10:28:48469 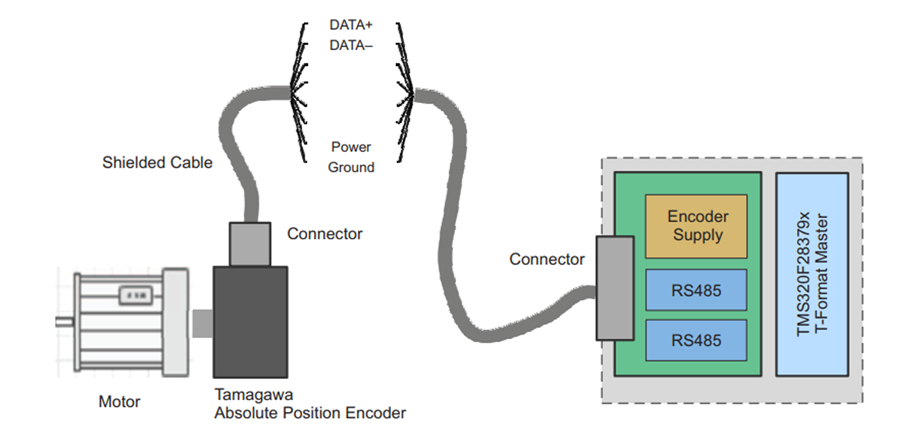
向電機(jī)線(xiàn)圈供應(yīng)電壓和電流,然后通過(guò)監(jiān)控反饋來(lái)關(guān)閉伺服環(huán)路,從而為伺服電機(jī)供電。大多數(shù)情況下,伺服驅(qū)動(dòng)器含有三個(gè)嵌入式伺服環(huán)路,即電流(或扭矩)環(huán)、速度環(huán)和位置環(huán);三個(gè)環(huán)路相互作用以實(shí)現(xiàn)精準(zhǔn)的運(yùn)動(dòng)控制。需要哪些環(huán)路
2023-07-10 10:02:25985 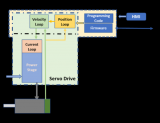
在現(xiàn)代工業(yè)領(lǐng)域,伺服驅(qū)動(dòng)器是一種關(guān)鍵的電氣裝置,它在機(jī)器控制和運(yùn)動(dòng)控制系統(tǒng)中發(fā)揮著至關(guān)重要的作用。無(wú)論是工業(yè)機(jī)器人、數(shù)控機(jī)床還是自動(dòng)化生產(chǎn)線(xiàn),伺服驅(qū)動(dòng)器都是實(shí)現(xiàn)精準(zhǔn)位置控制和高效運(yùn)動(dòng)控制的關(guān)鍵組件。本文將介紹伺服驅(qū)動(dòng)器的工作原理、應(yīng)用領(lǐng)域以及在現(xiàn)代工業(yè)中的重要作用。
2023-08-21 17:34:022335 如何在工業(yè)驅(qū)動(dòng)器中實(shí)現(xiàn)精密的運(yùn)動(dòng)控制
2023-08-24 13:37:08283 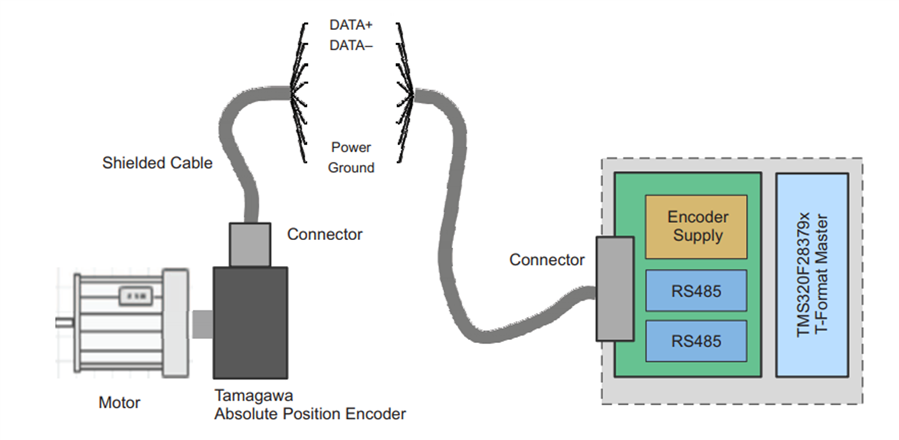
工業(yè)驅(qū)動(dòng)器的諸多方面都對(duì)實(shí)現(xiàn)精密的運(yùn)動(dòng)控制很重要,精密運(yùn)動(dòng)控制涉及實(shí)時(shí)控制設(shè)計(jì)中的三個(gè)基礎(chǔ)子系統(tǒng),即感應(yīng)、處理和驅(qū)動(dòng)。本文將論述各個(gè)子系統(tǒng)的支持技術(shù)示例。
2023-11-18 16:00:13260 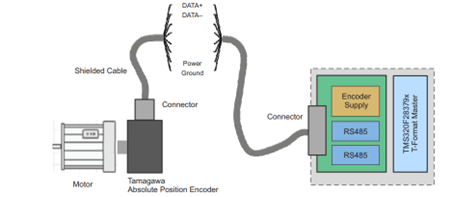
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論