目前,在電機(jī)加減速控制上,普遍的加減速方法主要有T型加減速和S型加減速,實(shí)現(xiàn)方法則有公式法或查表法。
2020-09-10 16:58:15 32680
32680 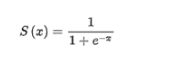
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-08-31 08:55:42
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM方波)。S型曲線的的方程,在[-5,5]的圖形如下圖所示:如要將此曲線應(yīng)用在...
2021-09-03 06:52:10
一、加減速控制曲線直線(梯形)加減速曲線--圖略指數(shù)型加減速曲線 --圖略S型加減速曲線--圖略二、參考資料《幾種步進(jìn)電機(jī)加減速方法的對(duì)比研究及其應(yīng)用》-------算法原理《基于STM32的步進(jìn)電機(jī)S形加減速控制曲線的快速實(shí)現(xiàn)方法》 --很實(shí)用,,,其他 --- 找度娘去.....
2021-09-03 06:23:50
效率,實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)平滑穩(wěn)定,是目前工業(yè)加工中一直要解決的關(guān)鍵問題。當(dāng)前運(yùn)動(dòng)控制系統(tǒng)中常用的加減速算法主要有:梯形曲線加減速、S形曲線加減速、指數(shù)曲線加減速、拋物線曲線加減速等。...
2021-07-07 07:37:15
求大神幫忙解決用單片機(jī)發(fā)脈沖給電機(jī)驅(qū)動(dòng),來控制步進(jìn)電機(jī)加減速的程序,,急求!!!
2015-04-24 20:27:08
步進(jìn)電機(jī)S加減速算法與查表方式哪個(gè)更好,有誰用過,能否提供實(shí)例?
2023-11-08 08:10:26
S型加減速的優(yōu)點(diǎn)是什么?步進(jìn)電機(jī)S型加減速控制的源程序該怎樣去實(shí)現(xiàn)呢?
2021-12-20 08:04:09
STM32系列的內(nèi)核主要有什么?步進(jìn)電機(jī)的特點(diǎn)是什么?步進(jìn)電機(jī)S型加減速代碼分享
2021-12-21 07:32:32
步進(jìn)電機(jī)S型曲線加減速算法與實(shí)現(xiàn)Monte-Carlo2017-05-18 10:06:232653收藏2分類專欄:機(jī)器人運(yùn)動(dòng)學(xué)一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下
2021-07-08 09:56:46
最近在做步進(jìn)電機(jī)的控制,在步進(jìn)電機(jī)的控制中,步進(jìn)電機(jī)的加減速控制時(shí)比較難的一方面。搜索了一些關(guān)于步進(jìn)電機(jī)的加減速控制的論文,其中都有提到S曲線的加減速控制時(shí)最理想的控制方案,但是在控制的過程比較復(fù)雜
2017-12-04 23:31:40
步進(jìn)電機(jī)S(SigMoid)曲線加減速【查表法】原創(chuàng)Renjiankun 最后發(fā)布于2019-01-11 14:18:00 閱讀數(shù) 17578 收藏展開首先感謝以下博客的博主提供的參考公式
2021-07-08 09:38:52
步進(jìn)電機(jī)加減速控制子程序分享
2021-12-21 07:37:32
步進(jìn)電機(jī)加減速設(shè)計(jì)設(shè)計(jì)要求:1、設(shè)置開始、停止及加減速健;2、要求顯示運(yùn)行狀態(tài),并設(shè)置一個(gè)極限值,當(dāng)速度超過極限時(shí)發(fā)出報(bào)警信號(hào)。急!!!!!!!!!!!!
2013-11-19 22:13:47
一、靜態(tài)指標(biāo)術(shù)語 二、動(dòng)態(tài)指標(biāo)術(shù)語 三、步進(jìn)電機(jī)加減速過程控制技術(shù) 四、步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)控制 五、步進(jìn)電機(jī)控制策略
2021-07-08 09:25:50
步進(jìn)電機(jī)加減速算法
2022-01-11 06:45:22
目錄步進(jìn)電機(jī)梯形加減速梯形加減速算法原理分析算法實(shí)現(xiàn)步進(jìn)電機(jī)梯形加減速電機(jī)的控制方式一般分為開環(huán)控制與閉環(huán)控制兩種控制方式,其中開環(huán)控制原理框圖如下:這種種控制方式的特點(diǎn)是:控制簡單、實(shí)現(xiàn)容易、價(jià)格
2021-07-07 07:53:48
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-06-28 08:41:08
求程序單片機(jī)控制步進(jìn)電機(jī)的加減速。
2014-05-08 17:35:18
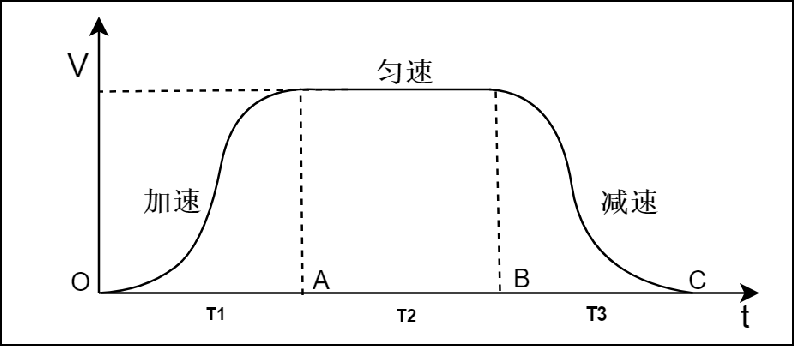
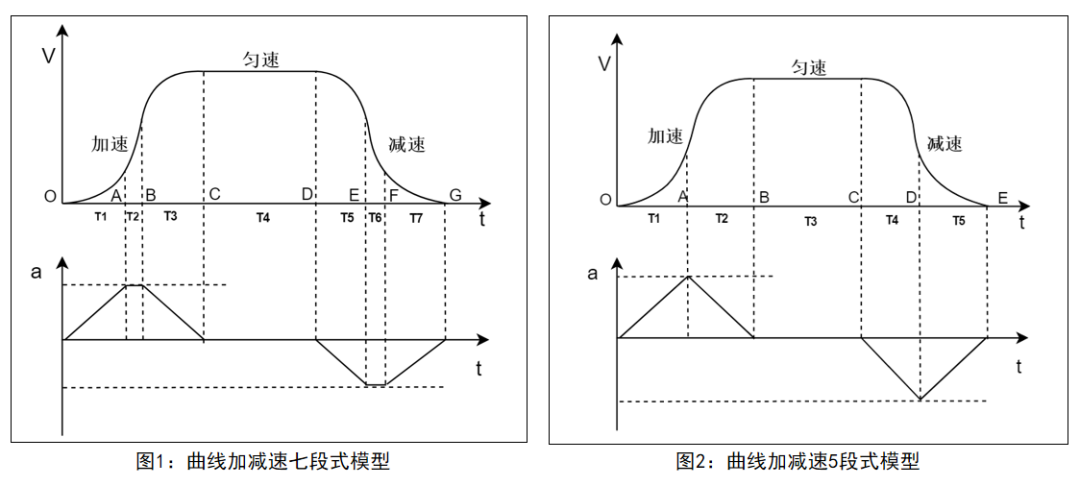
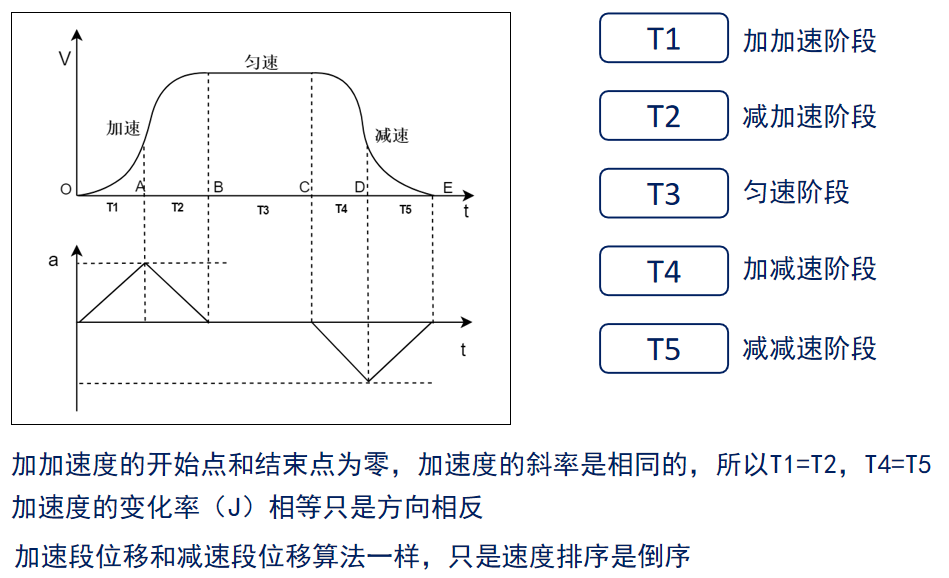
目錄步進(jìn)電機(jī)S形加減速簡介七段S形加減速算法原理分析五段S形加減速算法實(shí)現(xiàn)算法分析查表法編程實(shí)現(xiàn)思路及方法S曲線加減速流程圖步進(jìn)電機(jī)S形加減速簡介一個(gè)物體從起點(diǎn)運(yùn)動(dòng)到終點(diǎn)要經(jīng)歷加速、勻速、減速的過程
2021-07-08 09:18:53
傳統(tǒng)的S曲線加減速控制算法計(jì)算量大,在一些情況下可能要解已元四次方程,非常復(fù)雜!我想知道有沒其他求解S曲線,且計(jì)算量小點(diǎn)的方法!謝謝!
2015-09-04 11:34:42
使用梯形/S形加減速算法。加減速算法的實(shí)現(xiàn)中,我沒有采用之前的定時(shí)器主從模式的方式。因?yàn)闆]有想到如何消除在定時(shí)器中斷服務(wù)程序中切換PWM波輸出頻率時(shí)產(chǎn)生的短暫延時(shí)。看來很多文章,還是試著用翻轉(zhuǎn)電平的方法來產(chǎn)生PWM波。原理/思路...
2021-07-08 09:52:37
電機(jī)的加減速為了,電機(jī)啟動(dòng)停止更加穩(wěn)定,提高勻速速度。S曲線算法優(yōu)化電機(jī)的運(yùn)行。整個(gè)過程就是,模仿S曲線設(shè)置電機(jī)的頻率程序采用,通過s_curve()函數(shù)映射一張小于1500個(gè)點(diǎn)的表, 輸出一次
2021-06-29 08:23:53
簡單說明一下硬件資源,需要用到STM32兩個(gè)定時(shí)器,TIM1產(chǎn)生PWM脈沖并對(duì)脈沖個(gè)數(shù)計(jì)數(shù),TIM2開啟定時(shí)中斷用于算法的實(shí)現(xiàn)。采用CubeMX+Hal庫配置,這里不做詳細(xì)介紹,重點(diǎn)介紹S型加減速算法的實(shí)現(xiàn)。首先了解一下S曲線函數(shù),見下圖:...
2021-06-28 07:35:08
基于STM32的步進(jìn)電機(jī)S型加減速控制算法STM32簡介 STM32代表ARM Cortex-M內(nèi)核的32位微控制器。專為要求高性能、低成本、低功耗的嵌入式應(yīng)用專門設(shè)計(jì)的: STM32系列的內(nèi)核
2021-06-29 08:42:40
項(xiàng)目中對(duì)步進(jìn)電機(jī)運(yùn)行速度有了新要求,所以嘗試實(shí)現(xiàn)梯形加減速算法,S形加減速算法。本文主要實(shí)現(xiàn)S形加減速算法。原理/思路步進(jìn)電機(jī)有啟動(dòng)頻率這一概念。在啟動(dòng)時(shí)有一個(gè)最大啟動(dòng)頻率,在低于最大啟動(dòng)頻率的速度
2021-06-28 10:07:24
電機(jī)加減速的時(shí)候需要用到平滑算法,常用的平滑算法有S型跟梯形,因?yàn)?b class="flag-6" style="color: red">S型的平滑效果比較好,所以選擇S型。看了幾篇論文,有的是使用多項(xiàng)函數(shù)、有的是使用分段,但這兩個(gè)的函數(shù)曲線看起來并不是那么好,后面選擇
2021-08-18 06:33:37
實(shí)習(xí)公司項(xiàng)目需要控制步進(jìn)電機(jī),電機(jī)方面主要包括控制運(yùn)動(dòng)、加減速、限位。下面介紹一下在電機(jī)控制方面的心得,由于對(duì)于電機(jī)的控制不需要很精確,并且自身能力有限,相比于大牛有很大的差距。1.需要實(shí)現(xiàn)的功能
2021-06-29 08:13:12
基于STM32的步進(jìn)電機(jī)S型加減速控制算法STM32簡介STM32代表ARM Cortex-M內(nèi)核的32位微控制器。專為要求高性能、低成本、低功耗的嵌入式應(yīng)用專門設(shè)計(jì)的:STM32系列的內(nèi)核主要有
2019-12-16 09:41:59
關(guān)于S型曲線加減速算法的知識(shí)點(diǎn)不看肯定后悔
2021-10-28 08:52:37
我寫了一個(gè)步進(jìn)電機(jī)加減速運(yùn)動(dòng)的程序,但是發(fā)現(xiàn)電機(jī)進(jìn)入不了加減速,主程序中給定一個(gè)固定步數(shù),由加減速程序去判斷加減速且走完固定步數(shù)就關(guān)閉定時(shí)器,但是電機(jī)停不了,也不能加減速。
2016-12-07 09:52:05
電機(jī)加減速算法目的:對(duì)于上述2、3的場(chǎng)合,步進(jìn)電機(jī)容易出現(xiàn)丟步和過沖甚至無法啟動(dòng)的現(xiàn)象,所以加入該算法來解決這一問題。3. 算法實(shí)現(xiàn)3.1加減速期望曲線...
2021-07-07 07:58:50
如何控制一個(gè)步進(jìn)電機(jī)的加減速?
2021-10-19 06:03:00
如何使用PWM的相位控制步進(jìn)電機(jī)正反轉(zhuǎn)和加減速?
2021-10-14 09:19:38
如何去實(shí)現(xiàn)步進(jìn)電機(jī)的加減速?步進(jìn)電機(jī)絕對(duì)位置的調(diào)用方法是什么?
2021-09-27 09:05:23
前段時(shí)間收錄了一份梯形加減速,將滑臺(tái)電機(jī)定位速度提升了4倍,那感覺杠杠的!后來聽師傅說還有一種S形加減速更能匹配步進(jìn)電機(jī)運(yùn)動(dòng)特性,我花了3天找了好多資料關(guān)于介紹S形加減速,在文章最后人家都留了一個(gè)圖
2023-03-23 15:27:56
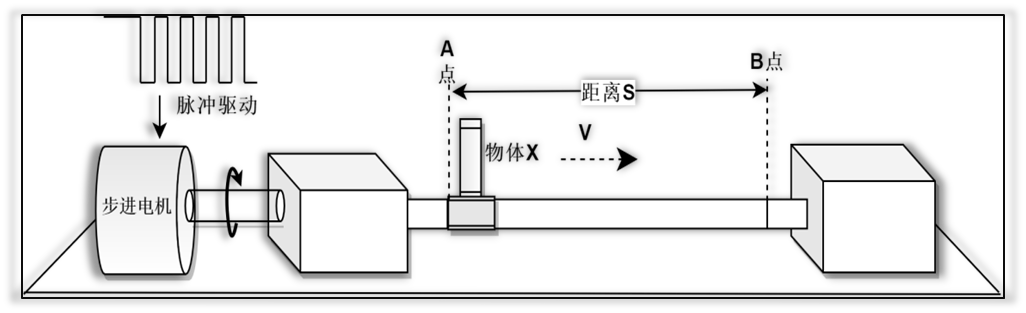
問題的提出如何讓步進(jìn)電機(jī)平滑地加減速運(yùn)動(dòng)一段固定的行程硬件平臺(tái)86步進(jìn)電機(jī)STM32F103ZET6微控制器步進(jìn)電機(jī)的轉(zhuǎn)速由由輸出給驅(qū)動(dòng)器的PWM頻率而定,使用MCU的一個(gè)定時(shí)器(TIM2_CH1
2021-07-07 06:49:06
電機(jī)加減速的時(shí)候需要用到平滑算法,常用的平滑算法有S型跟梯形,因?yàn)?b class="flag-6" style="color: red">S型的平滑效果比較好,所以選擇S型。看了幾篇論文,有的是使用多項(xiàng)函數(shù)、有的是使用分段,但這兩個(gè)的函數(shù)曲線看起來并不是那么好,后面選擇
2021-08-17 08:05:17
怎么實(shí)現(xiàn)S形加減速算法?
2021-10-09 09:16:34
怎么實(shí)現(xiàn)步進(jìn)電機(jī)S型曲線加減速算法?
2021-10-12 10:02:51
怎么實(shí)現(xiàn)STM32步進(jìn)電機(jī)S型加減速算法?
2021-10-11 07:57:55
實(shí)習(xí)公司項(xiàng)目需要控制步進(jìn)電機(jī),電機(jī)方面主要包括控制運(yùn)動(dòng)、加減速、限位。下面介紹一下在電機(jī)控制方面的心得,由于對(duì)于電機(jī)的控制不需要很精確,并且自身能力有限,相比于大牛有很大的差距。1.需要實(shí)現(xiàn)的功能
2021-07-08 06:42:20
目錄步進(jìn)電機(jī)梯形加減速梯形加減速和S型曲線比較如何產(chǎn)生PWM波及TIMx定時(shí)器配置梯形加減速算法原理分析1.梯形加減速2.步進(jìn)電機(jī)基礎(chǔ)方程3.精確計(jì)算步進(jìn)時(shí)間間隔4. 加速度的變化算法實(shí)現(xiàn)程序流程圖
2022-01-24 08:15:46
梯形加減速速度曲線采用“梯形”加減速算法,在運(yùn)動(dòng)過程中分成以下四個(gè)狀態(tài):空閑狀態(tài),加速狀態(tài),勻速狀態(tài)與減速狀態(tài)。圖1 梯形加減速速度曲線加減速算法實(shí)現(xiàn)...
2022-01-11 08:25:05
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-09-03 08:35:55
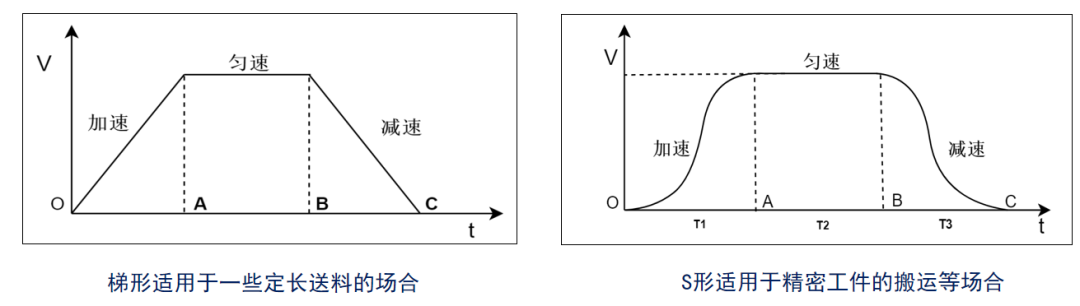
步進(jìn)電機(jī)在實(shí)際運(yùn)用當(dāng)中常常要使用加減速控制,才能達(dá)到精準(zhǔn)的定位和快速反應(yīng)的要求。加減速控制主要包括以下三種方法:直線型加減速速度曲線 此種升降速控制方法計(jì)算簡單,節(jié)省資源,但加速、勻速和減速過程不能
2016-01-12 11:04:45
為什么我們喜歡用sigmoid這類S型非線性變換?萌新求助,求大佬詳細(xì)介紹一下stm32S型加減速算法
2021-11-19 07:07:27
blinker是如何控制步進(jìn)電機(jī)的正反轉(zhuǎn)以及加減速的?有哪些程序?
2021-06-29 06:11:38
請(qǐng)問一下stm32如何控制步進(jìn)電機(jī)加減速?
2021-10-18 07:21:51
加減速控制是數(shù)控系統(tǒng)的關(guān)鍵技術(shù),對(duì)提高數(shù)控系統(tǒng)的精度及速度有重要的意義。提出了一種步進(jìn)電機(jī)三軸聯(lián)動(dòng)的快速加減速算法--動(dòng)態(tài)查表法,該算法結(jié)合DDA 插補(bǔ)算法,可以用
2010-01-18 15:33:41 106
106 CNC加減速控制算法及其數(shù)控加工誤差的研究
2016-04-26 11:14:109 CNC系統(tǒng)加減速新型實(shí)用算法研究,下來看看
2016-04-26 11:14:1011 CNC系統(tǒng)直線加減速優(yōu)化算法,下來看看。
2016-04-26 11:14:1017 指數(shù)加減速的改進(jìn)算法,有需要的下來看看。
2016-04-29 17:57:0915 一種預(yù)判插補(bǔ)時(shí)間的S形加減速插補(bǔ)算法,下來看看
2016-04-29 17:57:0933 數(shù)控系統(tǒng)的插補(bǔ)算法及加減速控制方法研究。
2016-05-03 09:38:5433 數(shù)控沖床x軸高速伺服運(yùn)動(dòng)加減速控制算法研究
2016-05-03 09:38:5411 基于最小偏差法步進(jìn)電機(jī)加減速控制的研究。
2016-05-03 13:52:598 基于時(shí)間分割的前加減速快速插補(bǔ)算法,下來看看
2016-05-03 13:52:5911 基于S曲線的步進(jìn)電機(jī)加減速的控制,下來看看
2016-05-03 13:52:5930 基于SOPC的步進(jìn)電機(jī)加減速PWM控制器IP核設(shè)計(jì)
2016-05-03 13:52:5918 基于Proteus的步進(jìn)電機(jī)加減速控制輔助設(shè)計(jì)方法
2016-05-03 13:52:5917 基于ATmega16單片機(jī)的步進(jìn)電機(jī)加減速控制
2016-05-03 13:52:5916 基于ARM芯片的步進(jìn)電機(jī)加減速控制,下來看看
2016-05-03 13:52:5923 基于ARM芯片的_步進(jìn)電機(jī)加減速控制,下來看看
2016-05-03 13:52:597 基于ARM芯片S3C4510的步進(jìn)電機(jī)加減速控制
2016-05-03 13:52:5914 多步進(jìn)電機(jī)的變細(xì)分加減速控制研究,下來看看
2016-05-03 14:23:269 沖床步進(jìn)電機(jī)加減速運(yùn)動(dòng)的研究,下來看看。
2016-05-03 14:23:262 步進(jìn)電機(jī)加減速控制規(guī)律,有需要的朋友下來看看
2016-05-04 14:09:569 步進(jìn)電機(jī)加減速控制,又需要的朋友 下來看看
2016-05-04 14:09:5630 步進(jìn)電機(jī)短位移高響應(yīng)加減速控制方法研究。
2016-05-04 14:09:564 不同加減速控制算法的能耗分析與比較,下來看看
2016-05-04 14:37:017 S曲線加減速控制新算法的研究又需要的下來看看
2016-05-04 14:37:0111 STM32 多步進(jìn)電機(jī)加減速算法精確控制 親測(cè)可用~~~
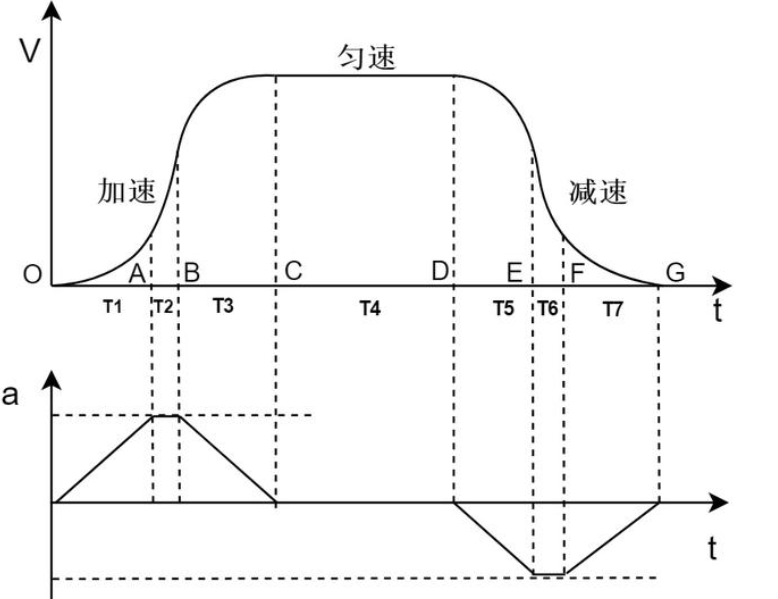
2017-04-02 16:20:45270 電機(jī)的驅(qū)動(dòng)電路,在傳統(tǒng)的3段直線加減速控制算法基礎(chǔ)上增加至7段S形曲線加減速過程,控制步進(jìn)電機(jī)的啟動(dòng)和停止。實(shí)驗(yàn)結(jié)果表明,該控制方法克服了直線加減速中不連續(xù)、易造成系統(tǒng)沖擊的問題,整個(gè)系統(tǒng)實(shí)現(xiàn)柔性控制,電機(jī)啟動(dòng)、停止連續(xù)性能提高30%。 本設(shè)計(jì)使用SPMC75
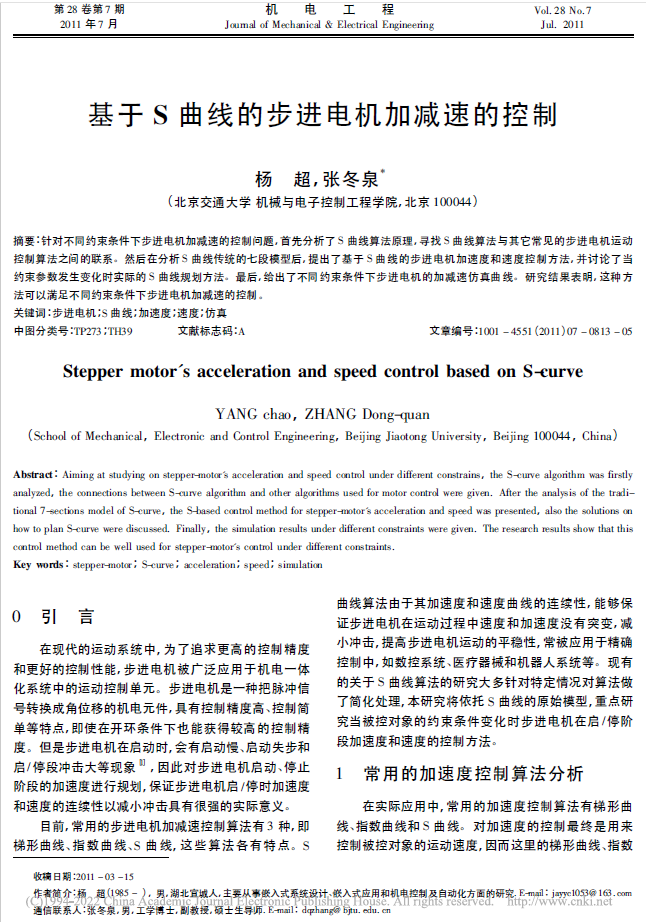
2017-12-06 09:09:1316 針對(duì)不同約束條件下步進(jìn)電機(jī)加減速的控制問題,首先分析了 S 曲線算法原理,尋找 S 曲線算法與其它常見的步進(jìn)電機(jī)運(yùn)動(dòng)控制算法之間的聯(lián)系。然后在分析 S 曲線傳統(tǒng)的七段模型后,提出了基于 S 曲線
2019-03-13 08:00:000 S曲線加減速是高檔CNC 系統(tǒng)中的一項(xiàng)重要功能。本文對(duì)S 曲線加速度算法進(jìn)行了深入的研究, 給出了加加速度、加速度、速度、位移的計(jì)算通式, 并對(duì)各種情況進(jìn)行了討論, 通過一個(gè)計(jì)算實(shí)例表明, 本文
2021-03-26 17:09:4416 在2021年接觸到步進(jìn)電機(jī),當(dāng)時(shí)是用來驅(qū)動(dòng)熱敏打印機(jī),沒有用到加減速算法,速度時(shí)間表好像是日本客戶那邊提供過來的,這次調(diào)試加減速算法,遇到了不少問題,在這里記錄一下,希望能幫到未來對(duì)此有困惑的自己,如果能幫到其他人也算是有幸。
2023-01-12 17:00:447875 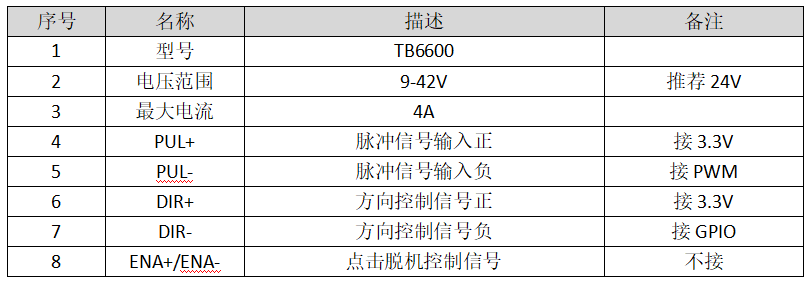
算法實(shí)現(xiàn) 程序流程圖 步進(jìn)電機(jī)梯形加減速 電機(jī)的控制方式一般分為開環(huán)控制與閉環(huán)控制兩種控制方式,其中開環(huán)控制原理框圖如下:這種種控制方式的特點(diǎn)是:控制簡單、實(shí)現(xiàn)容易、價(jià)格較低,這種開環(huán)控制方式,負(fù)載位置
2023-03-17 15:08:376 步進(jìn)電機(jī)S形加減速簡介:
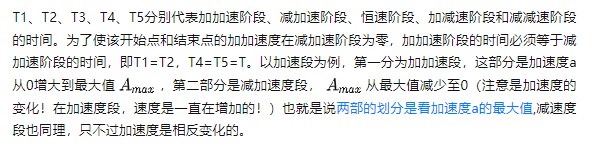
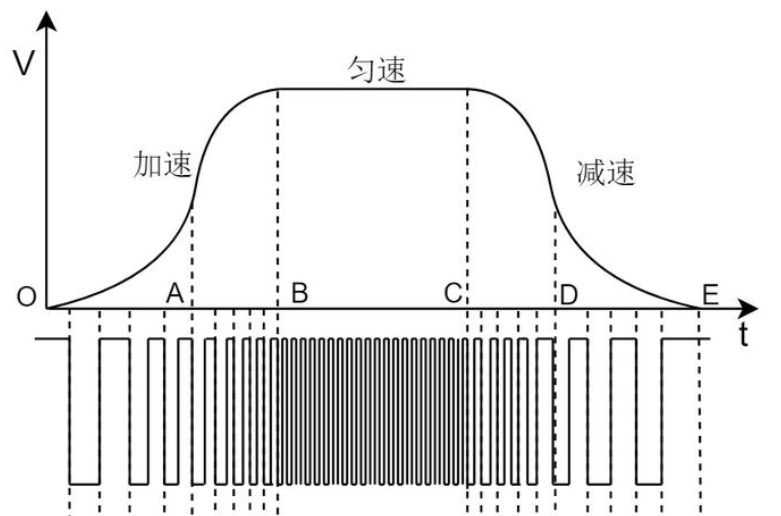
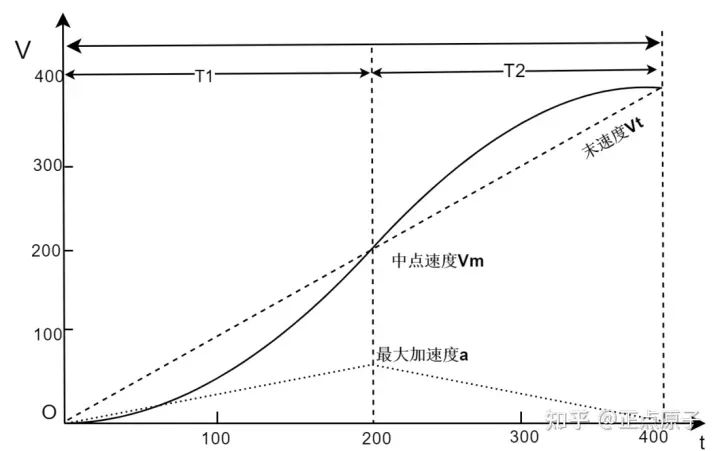
一個(gè)物體從起點(diǎn)運(yùn)動(dòng)到終點(diǎn)要經(jīng)歷加速、勻速、減速的過程,把整個(gè)過程中速度隨時(shí)間變化關(guān)系畫出來,就是速度曲線。 “S”形加減速就是指速度曲線中加減速階段的曲線呈現(xiàn)一個(gè)英文字母
2023-03-20 14:33:551 為什么要使用加減速呢?步進(jìn)電機(jī)有一個(gè)很重要的技術(shù)參數(shù):空載啟動(dòng)頻率,也就是在沒有負(fù)載的情況下能夠正常啟動(dòng)的最大
脈沖頻率,如果脈沖頻率大于該值,步進(jìn)電機(jī)則不能夠正常啟動(dòng),發(fā)生丟步或者堵轉(zhuǎn)的情況
2023-03-22 09:31:380 目標(biāo):
1、指定簡單的電機(jī)控制協(xié)議,支持通過串口通訊對(duì)多步進(jìn)電機(jī)進(jìn)行運(yùn)動(dòng)控制
2、支持詳細(xì)參數(shù)輸入的運(yùn)動(dòng)控制模式:控制方向、轉(zhuǎn)速、加減速率、細(xì)分等
3、支持位置控制模式,按照協(xié)議格式,輸入電機(jī)編號(hào)和位置,對(duì)多電機(jī)進(jìn)行控制
2023-03-23 10:23:134 。在實(shí)際應(yīng)用中,步進(jìn)電機(jī)的運(yùn)動(dòng)過程中需要考慮加減速問題,以達(dá)到精準(zhǔn)的位置控制要求。 一般來說,步進(jìn)電機(jī)的加減速時(shí)間需要根據(jù)實(shí)際情況進(jìn)行設(shè)置。對(duì)于不同的應(yīng)用場(chǎng)景,需要進(jìn)行不同的設(shè)置。在步進(jìn)電機(jī)的控制系統(tǒng)中,加減速時(shí)
2023-10-13 17:39:35989
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論