機器視覺系統(tǒng)基于數(shù)字圖像中的信息進(jìn)行決策。若系統(tǒng)算法不分主次,讓所有圖像數(shù)據(jù)都參與到目標(biāo)識別或分類的計算過程中,機器視覺系統(tǒng)的實時性就很難得到保證。
2022-10-24 10:11:17 949
949 機器視覺 --檢測圖像邊緣小程序
2015-08-23 21:35:10
建模和目標(biāo)識別等領(lǐng)域中,也稱為特征點檢測。角點通常被定義為兩條邊的交點,更嚴(yán)格的說,角點的局部鄰域應(yīng)該具有兩個不同區(qū)域的不同方向的邊界。而實際應(yīng)用中,大多數(shù)所謂的角點檢測方法檢測的是擁有特定特征的圖像點
2016-01-22 13:46:00
。計算機視覺是一門獨立的學(xué)科,有著30年左右的歷史,集圖像處理、模式識別、人工智能技術(shù)為一體,著重服務(wù)于一幅或多幅圖像的計算機分析。機器視覺相對于計算機視覺來說,則是一項比較新的新型技術(shù),旨在為制造工業(yè)等
2014-05-13 14:57:44
;可以獲知近期內(nèi)布匹的質(zhì)量情況等等。 四、用戶界面及操作 項目要求利用機器視覺技術(shù),智能的識別出流水線上布匹的所有雜質(zhì)以及它們的數(shù)量、大小。根據(jù)項目要求,我們設(shè)計如下: (1)圖像顯示區(qū):實時
2014-07-31 10:16:47
機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統(tǒng)是指通過機器視覺產(chǎn)品(即圖像攝取裝置,分 CMOS 和CCD 兩種)將被攝取目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度
2016-01-17 07:56:01
、模式識別、機器視覺、神經(jīng)網(wǎng)絡(luò)、心理學(xué)、生理學(xué)、數(shù)學(xué)等諸多學(xué)科的內(nèi)容。北京盈美智科技發(fā)展有限公司代理機器視覺產(chǎn)品,包括工業(yè)相機,圖像處理軟件系統(tǒng),圖像采集卡,鏡頭,光源等等。可以做出完整的人臉識別系統(tǒng)。詳情請登錄我們的網(wǎng)站www.cnimage.com、聯(lián)系電話:***。
2014-01-14 11:05:59
第1章 簡介1. 機器視覺常見任務(wù)目標(biāo)識別(Object identification):用來甄別不同的被測物體。比如物流控制或者根據(jù)不同目標(biāo)進(jìn)行不同檢測。識別可以基于特殊的識別特征,比如字符串
2021-07-02 06:34:32
的三維世界的識別。機器人視覺主要研究用計算機來模擬人的視覺功能從客觀事物的圖像中提取信息,進(jìn)行處理并加以理解,最終用于實際檢測、測量和控制。機器視覺是人工智能正在快速發(fā)展的一個分支。簡單說來,機器視覺就是
2020-08-28 10:48:50
目標(biāo)識別 YOLO 學(xué)習(xí)筆記(一)
2020-05-12 15:05:34
執(zhí)行機構(gòu),實現(xiàn)產(chǎn)品的自動化檢測、識別、定位等功能。 CCD機器視覺的工作方式 機器視覺系統(tǒng)采用CCD照相機,將被測的目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成
2020-12-10 16:32:48
結(jié)構(gòu)工程中一種非常常見的識別方法,用于識別潛在的結(jié)構(gòu)完整性問題,例如隱藏的物體或空隙。這是一種識別機械問題的
2021-08-31 06:11:58
各位好!我是一名學(xué)生,先階段在準(zhǔn)備競賽,需要RCS目標(biāo)識別技術(shù),實現(xiàn)海上油污檢測。請問有沒有地方采購現(xiàn)成產(chǎn)品,或是自己制作是如何制作,謝謝!或是有其他什么方法可以實現(xiàn)海上油污檢測?
2015-01-27 15:50:02
的工作“機理”跟機器視覺系統(tǒng)非常相像。機器視覺檢測系統(tǒng)是采用CCD、CMOS工業(yè)相機將被檢測的目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號,圖像處理系統(tǒng)
2016-08-29 14:19:49
圖像采集,F(xiàn)PGA做圖像處理,主要采取opencv對圖像進(jìn)行處理,ok210可做平時擴展項目,例如植入APP中,如果cortex-A8足夠強大可考慮換下樹莓派原理:運動目標(biāo)識別;背景減除
2015-08-10 14:13:25
識別方法.最后,定義規(guī)則整合各項標(biāo)記,實現(xiàn)了對圖像內(nèi)容的劃分,提取其布局信息.實驗結(jié)果表明,該方法應(yīng)用于常見幾種布局的戶外建筑目標(biāo)圖像都能收到較好的效果【關(guān)鍵詞】:超像素;;圖象分割;;特征提取;;D
2010-04-24 09:47:27
基于嵌入式圖像處理平臺的實時多目標(biāo)識別算法人工智能技術(shù)與咨詢 昨天本文來自《科學(xué)技術(shù)與工程》,作者王旭輝等摘 要提出了一種適用于空間觀測任務(wù)的實時多目標(biāo)識別算法,它基于DSP和FPGA組合的圖像處理
2021-12-21 07:02:06
本人新手,之前從未接觸過圖像處理,現(xiàn)在因為項目需要搭建一個關(guān)于圖像處理和目標(biāo)識別的MATLAB系統(tǒng),系統(tǒng)介紹如下: 想要從圖片中將目標(biāo)提取出來并與模板庫進(jìn)行匹配對比,以確定是否為我感興趣的目標(biāo)
2016-07-10 15:05:58
產(chǎn)品的自動化檢測、識別、定位等功能。CCD機器視覺的工作方式機器視覺系統(tǒng)采用CCD照相機,將被測的目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號,圖像
2020-05-27 14:33:42
實際地面距離進(jìn)行標(biāo)定,便可獲知機器人所在位置。4.2 模板匹配算法 模板匹配技術(shù)是圖像目標(biāo)識別技術(shù)中一個重要的研究方向,具有算法簡單、計算量小以及識別率高等特點,目前在目標(biāo)識別領(lǐng)域得到廣泛應(yīng)用。它是用
2019-07-04 08:30:00
大家好,畢業(yè)設(shè)計做基于labview機器視覺的圖像定位系統(tǒng),打算調(diào)用筆記本的攝像頭進(jìn)行圖像采集,再進(jìn)行圖像處理,視覺模塊和采集模塊已經(jīng)下載了,可是不知道怎么采集圖像,求大家支招.
2017-03-31 14:54:31
流形學(xué)習(xí)是一種機器學(xué)習(xí)理論,旨在發(fā)現(xiàn)高維數(shù)據(jù)分布的內(nèi)在規(guī) 律,并 從中恢復(fù)低維流形結(jié)構(gòu) ,實現(xiàn)維數(shù)約簡 。本文將流形學(xué)習(xí)方法應(yīng)用于毫米波探測器目標(biāo)識 別 ,并 對現(xiàn)有流形學(xué)習(xí)算法進(jìn)行了改進(jìn)和推廣。
2021-12-20 15:43:44
圖像處理軟件作為機器視覺系統(tǒng)的重要組成部分,主要通過對圖像的分析、處理和識別,實現(xiàn)對特定目標(biāo)特征的檢測。由于機器視覺系統(tǒng)在現(xiàn)代工業(yè)領(lǐng)域的廣泛應(yīng)用,使應(yīng)用于機器視覺系統(tǒng)的機器視覺軟件技術(shù)得到了高速發(fā)展
2019-09-19 09:40:33
位置和運動信息的方法。該方法利用序列圖像和推廣卡爾曼濾波, 目標(biāo)獲取采用了H IS 模型。在移動機器人滿足一定機動的條件下, 較精確地得到了目標(biāo)的空間位置和運動信息。仿真結(jié)果驗證了該方法的有效性
2019-06-01 08:00:00
1、智能車目標(biāo)識別系統(tǒng)的實現(xiàn) 首先,簡單介紹一下上面提到的各個話題的范圍 (Domain),人工智能 (Artifitial Intelligence)是最大的話題,如果用一張圖來說明的話
2022-09-06 14:54:26
跟蹤等領(lǐng)域。不同種類的機器人由于工作的重點不一樣,它的視覺系統(tǒng)在軟件或硬件上都有著細(xì)微的差別。本文研究基于服務(wù)機器人的單目視覺系統(tǒng)。它處理的是二維圖像,是基于對無遮擋物體顏色和形狀的識別以及3D目標(biāo)物體的平動跟蹤。
2020-04-07 07:27:24
機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統(tǒng)是指通過機器視覺產(chǎn)品(即圖像攝取裝置,分 CMOS 和CCD 兩種)將被攝取目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),得到被攝目標(biāo)的形態(tài)信息
2015-11-09 10:16:10
機器視覺系統(tǒng)中的照明系統(tǒng)是極其重要的一部分,如何選擇光源方案,它的好壞直接影響著后面的圖像處理。合適的照明是機器視覺應(yīng)用成功的關(guān)鍵,通過適當(dāng)?shù)墓庠凑彰髟O(shè)計,使圖像中的目標(biāo)信息與背景信息得到最佳分離
2019-08-02 06:40:52
電阻識別方法
2012-08-02 21:59:38
的影響,使高速相機可以清晰地“看見”被測物。高對比的圖像可以降低系統(tǒng)難度并提高系統(tǒng)的穩(wěn)定性;反之,低對比的圖像會增加系統(tǒng)的處理時間并使加大系統(tǒng)的復(fù)雜度。機器視覺應(yīng)用的成功很大一部分取決于照明設(shè)置,一個合適
2016-05-10 11:32:11
深度學(xué)習(xí)目前已成為發(fā)展最快、最令人興奮的機器學(xué)習(xí)領(lǐng)域之一。本文以計算機視覺的重要概念為線索,介紹深度學(xué)習(xí)在計算機視覺任務(wù)中的應(yīng)用,包括網(wǎng)絡(luò)壓縮、細(xì)粒度圖像分類、看圖說話、視覺問答、圖像理解、紋理生成
2019-06-08 08:00:00
貼片電阻的識別方法貼片電阻的識別方法 貼片電阻元件具有體積小,重量輕,安裝密度高,抗震性強,抗干擾能力強,高頻特性好等優(yōu)點,廣泛應(yīng)用于各類電子產(chǎn)品中,貼片元件按其形狀分為矩形,圓柱型,異形三類.按
2012-08-02 22:10:41
圖像處理軟件作為機器視覺系統(tǒng)的重要組成部分,主要通過對圖像的分析、處理和識別,實現(xiàn)對特定目標(biāo)特征的檢測。由于機器視覺系統(tǒng)在現(xiàn)代工業(yè)領(lǐng)域的廣泛應(yīng)用,使應(yīng)用于機器視覺系統(tǒng)的機器視覺軟件技術(shù)得到了高速發(fā)展
2014-06-27 15:55:33
最優(yōu)聚類中心法是一種有效的雷達(dá)目標(biāo)一維距離像識別方法,但當(dāng)訓(xùn)練數(shù)據(jù)較少時,該方法的識別性能急劇下降。其原因是該算法在利用少量數(shù)據(jù)進(jìn)行訓(xùn)練時易產(chǎn)生“病態(tài)”矩陣,
2009-05-20 20:06:47 18
18 將結(jié)構(gòu)光方法應(yīng)用到地面移動機器人視覺道路識別中。首先闡述了結(jié)構(gòu)光方法的原理,并根據(jù)結(jié)構(gòu)光的特點,研究了在噪聲干擾條件下的環(huán)境圖像的處理、道路識別、路徑規(guī)劃等
2009-06-06 15:08:3219 本文提出一種全新的圖像分割方法——連通線多級切割方法,并在此基礎(chǔ)上建立圖像NMI特征的目標(biāo)識別與跟蹤算法。文章給出了運用連通線多級切割方法實現(xiàn)閾值求取、圖像分割、
2009-07-15 10:36:0420 介紹了一種有目標(biāo)識別功能的圖像采集系統(tǒng),用USB 接口芯片實現(xiàn)了數(shù)據(jù)的傳輸。闡述了系統(tǒng)的硬件、固件、設(shè)備驅(qū)動程序和應(yīng)用軟件的設(shè)計與實現(xiàn)方法。詳細(xì)介紹了目標(biāo)識別算法
2009-08-13 08:42:4514 針對微型航天探測器在星空運動背景下對目標(biāo)識別的要求,提出一種基于圖像配準(zhǔn)與邊緣提取的差分算法。該算法將采集的連續(xù)兩幀圖像配準(zhǔn)后差分,將差分圖像二值
2009-08-15 15:10:2115 針對具有多個特征指標(biāo)的模糊多傳感器目標(biāo)識別問題,提出一種新的模糊多傳感器數(shù)據(jù)融合方法。該方法根據(jù)信息熵理論,引入不均衡度定義熵權(quán)矢量,通過求解數(shù)學(xué)規(guī)劃問題,
2009-10-04 14:12:0930 遙感圖像中不同港口的內(nèi)港區(qū)域呈現(xiàn)出不同的形狀,該文提出一種基于內(nèi)港區(qū)域的港口目標(biāo)識別方法。首先利用直方圖和形態(tài)學(xué)算子分割海域;再利用多邊形近似法提取海岸線上的
2009-11-17 15:22:319 該文提出了一種基于小波域非負(fù)矩陣分解特征提取的合成孔徑雷達(dá)圖像目標(biāo)識別方法。該方法對圖像二維離散小波分解后提取低頻子帶圖像,用非負(fù)矩陣分解對低頻子帶圖像提取特
2009-11-21 11:58:4821 為了識別出具體的欺騙干擾方式,從而使雷達(dá)可以正確跟蹤目標(biāo),并有針對性的選擇抗干擾方法,本文提出了基于高階累積量和模式識別技術(shù)的欺騙式干擾識別方法。該方法首先
2009-12-19 14:54:4515 針對當(dāng)前目標(biāo)識別系統(tǒng)中常用的信息融合方法識別率較低、運行速度慢、抗噪性差等問題,提出一種基于神經(jīng)網(wǎng)絡(luò)組和 DS 證據(jù)理論的信息融合方法。該方法兼顧神經(jīng)網(wǎng)絡(luò)和DS 推理
2010-01-18 12:22:525 利用合成孔徑雷達(dá)(Synthetic Aperture Radar, SAR)獲取的目標(biāo)像進(jìn)行識別時,基于子空間的自動目標(biāo)識別(Automatic Target Recognition, ATR)方法通常是對樣本數(shù)據(jù)的值空間進(jìn)行操作。當(dāng)識別相似目
2010-02-10 14:00:4719 形狀是人類視覺系統(tǒng)分析和識別目標(biāo)的基礎(chǔ)。針對現(xiàn)有方法的不足,該文提出了一種新的基于形狀統(tǒng)計模型的多類目標(biāo)自動識別方法。該模型定義形狀基元對作為特征描述子,從樣
2010-02-10 14:23:0922 本文從人類視覺系統(tǒng)識別彩色目標(biāo)的特點出發(fā),提出一種基于特征差異的彩色目標(biāo)快速識別方法,從而有效地提高了機器人視覺系統(tǒng)的實時性,并進(jìn)行了多物體情況下特定目標(biāo)的識別
2010-03-03 15:02:2814 提出了一種運動目標(biāo)識別與跟蹤系統(tǒng)的方案,給出了系統(tǒng)的原理圖和結(jié)構(gòu)框圖。重點論述了圖像處理的過程和算法,包括顏色模型的選擇,圖像的預(yù)處理,圖像分割,目標(biāo)的識別及
2010-07-20 16:14:3329 貼片磁珠的識別方法 種類:CBG(普通型) 阻抗:5Ω~3KΩ
2008-03-10 17:33:379444 TDK貼片磁珠的識別方法
2008-03-10 17:36:164406 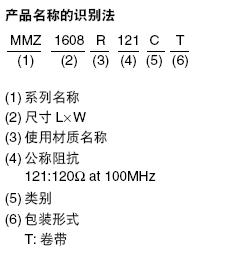
色環(huán)電阻識別方法
首先,從電阻的底端,
2008-07-17 17:42:4711821 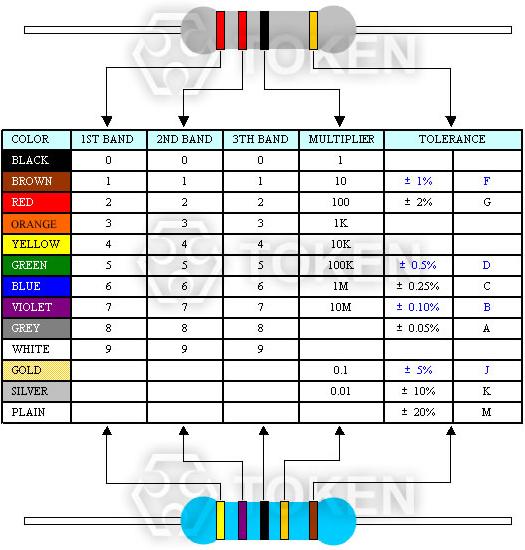
硬盤標(biāo)識識別方法
Seagate硬盤的編號比較簡單,其識別方法為:"ST+硬盤尺寸+容量+主標(biāo)識+副標(biāo)識+接口類型"。 為了另大家容易理解,簡單的
2008-09-04 12:56:416181 內(nèi)存芯片識別方法
1.LGS:LGS的SDRAM芯片上的標(biāo)識; GM72V*****1**T** GM為LGS產(chǎn)品; 72為SDRAM; 第1,2個*代表容量,16為16Mbit,66為64Mbit; 第3,4
2008-09-04 12:59:005092 常用塑料識別方法
2009-11-19 10:30:29483 電容的識別方法
電容的識別方法與電阻的識別方法基本相同,分直標(biāo)法、色標(biāo)法和數(shù)標(biāo)法3種。
電容的基本單位用法拉(F)表示,其它單位還
2010-02-06 18:13:135704 電容的識別方法與電阻的識別方法基本相同,分直標(biāo)法、色標(biāo)法和數(shù)標(biāo)法3種。
電容的基本單位用法拉(F)表示,其它單位還有:毫法(mF
2010-06-10 11:57:012553 通常的偵察手段對于軍事假目標(biāo)的識別能力有限,文中提出了一種新的軍事假目標(biāo)識別方法。在介紹偏振成像機理的基礎(chǔ)上,分析了偏振信息檢測和強度信息檢測在物理含義中的區(qū)別。
2011-08-29 15:11:0136 設(shè)計并實現(xiàn)了基于圖像檢索的地標(biāo)識別系統(tǒng)。該系統(tǒng)通過捕捉地標(biāo)的視覺特征,幫助游客或使用者更好地理解圖像的內(nèi)容并同時提供圖像拍攝的地理位置信息。首先根據(jù)提取的SURF特征搜
2012-07-16 17:02:0825 提出了一種基于相關(guān)分析的飛機目標(biāo)識別方法。該方法利用飛機圖像低頻和高頻部分合成濾波器模板,能達(dá)到很高識別率與很低的等錯率。該研究旨在提高飛機識別的準(zhǔn)確率和降低出錯
2013-09-02 14:54:5521 針對目標(biāo)識別問題,采取了基于協(xié)同學(xué)的模式識別理論,引入了協(xié)同神經(jīng)網(wǎng)絡(luò)并對其穩(wěn)定性進(jìn)行了分析,提出了基于協(xié)同神經(jīng)網(wǎng)絡(luò)對軍事目標(biāo)進(jìn)行識別的方法,并通過仿真驗證了該方法
2013-09-18 10:29:5926 電子開發(fā)機器人相關(guān)教程資料——全自主移動足球機器人目標(biāo)識別
2016-09-06 16:42:430 基于最小l_1稀疏圖表學(xué)習(xí)分類的圖像識別方法研究_蔣業(yè)文
2017-01-07 16:00:430 基于MVDR參數(shù)譜在艦船目標(biāo)識別中的應(yīng)用_魏鑫
2017-01-07 21:28:580 基于多核學(xué)習(xí)的靜態(tài)圖像人體行為識別方法_楊紅菊
2017-01-08 11:13:296 多尺度Retinex算法在自動目標(biāo)識別中的應(yīng)用_周澤華
2017-03-19 11:29:000 基于OpenCv運動目標(biāo)識別技術(shù)的研究_孟介成
2017-03-17 08:00:005 基于RHT的局部有遮擋圓形目標(biāo)識別方法_顧肇瑞
2017-03-17 08:00:000 航天運載器端面特征的新型圖像特征識別方法_陳浩
2017-03-19 19:07:041 基于大視場星敏感器的目標(biāo)識別技術(shù)_丁國鵬
2017-03-19 19:19:350 針對具有多個特征指標(biāo)的模糊多傳感器目標(biāo)識別問題,提出一種新的模糊多傳感器數(shù)據(jù)融合方法。該方法根據(jù)信息熵理論,引入不均衡度定義熵權(quán)矢量,通過求解數(shù)學(xué)規(guī)劃問題,得到各目標(biāo)類別的優(yōu)屬度,并給出目標(biāo)識別規(guī)則。實驗結(jié)果表明,該方法能提高目標(biāo)識別結(jié)果的客觀性和可信度,具有可操作性。
2017-09-08 15:25:553 電磁場在目標(biāo)識別中的應(yīng)用
2017-09-15 10:01:5422 常用電子元器件應(yīng)用要點及識別方法
2017-09-21 11:01:5921 針對被局部遮擋目標(biāo)的識別困難的問題,將目標(biāo)圖像的SIFT( Scale Invariant Feature Transform)特征矢量作為視覺單詞,應(yīng)用視覺詞匯算法,提出了基于SIFT特征視覺詞匯
2017-11-14 11:04:145 針對詞袋模型易受到無關(guān)的背景視覺噪音干擾的問題,提出了一種結(jié)合顯著性檢測與詞袋模型的目標(biāo)識別方法。首先,聯(lián)合基于圖論的視覺顯著性算法與一種全分辨率視覺顯著性算法,自適應(yīng)地從原始圖像中獲取感興趣區(qū)域
2017-11-17 15:24:142 針對遙感圖像視覺對比度差、分辨率低及目標(biāo)含有不同角度旋轉(zhuǎn)的情況,在稀疏表示分類識別的基礎(chǔ)上,提出一種基于擴展字典稀疏表示的遙感目標(biāo)識別方法。首先將訓(xùn)練樣本和待測樣本進(jìn)行二進(jìn)小波變換增強,提取增強圖像
2017-11-17 17:18:389 ,在輸入圖像質(zhì)量不佳的情況下,這一點往往難以做到。在統(tǒng)計模式識別方法中,特征提取方便,識別速度與識別對象無關(guān),但需要得到字符集的穩(wěn)定特征,且在字符筆畫較多時要求的特征量非常大。二種識別方法各有優(yōu)缺點。 人類的視覺
2017-11-30 11:19:530 針對傳統(tǒng)的顏色一深度(RGB-D)圖像物體識別的方法所存在的圖像特征學(xué)習(xí)不全面、特征編碼魯棒性不夠等問題,提出了基于核描述子局部約束線性編碼( KD-LLC)的RGB-D圖像物體識別方法。首先
2017-12-07 10:22:311 在現(xiàn)代防空作戰(zhàn)中,為獲得最佳作戰(zhàn)效果,必須實時獲取戰(zhàn)場態(tài)勢估計,目標(biāo)識別是戰(zhàn)場態(tài)勢估計的重要組成部分。目標(biāo)識別技術(shù)利用多傳感器資源,通過對各個傳感器及其觀測信息的合理支配與使用,將各傳感器
2017-12-14 16:34:160 目標(biāo)識別作為現(xiàn)代雷達(dá)的重要發(fā)展方向之一,成為未來武器系統(tǒng)中的一個重要組成部分和當(dāng)前國內(nèi)外關(guān)注的熱點,具有廣泛的民用和軍事應(yīng)用價值。根據(jù)雷達(dá)的探測手段及應(yīng)用背景的不同,出現(xiàn)了多種識別方法,其中雷達(dá)
2020-07-20 08:18:002304 
。機器之心對該論文進(jìn)行了編譯介紹。 摘要 我們通過 12 種不同類型的圖像劣化(image degradation)方法,比較了人類與當(dāng)前的卷積式深度神經(jīng)網(wǎng)絡(luò)(DNN)在目標(biāo)識別上的穩(wěn)健性。首先,對比三種著名的 DNN(ResNet-152、VGG-19、GoogLeNet),我們發(fā)現(xiàn)
2018-10-19 00:48:01416 觀看iVeia的首席技術(shù)官Michael Fawcett,演示了采用Zynq Ultrascale + MPSoC的模塊上的Atlas 2Z8系統(tǒng)如何使用機器視覺和機器學(xué)習(xí)應(yīng)用程序執(zhí)行多目標(biāo)識別。
2018-11-26 06:22:002748 本文首先介紹了色環(huán)電感識別方法,其次介紹了色環(huán)電感的識別順序,最后介紹了色環(huán)電感識別注意要點。
2019-06-27 13:58:1933392 交通標(biāo)識識別算法一方面采用了基于卷積神經(jīng)網(wǎng)絡(luò)的訓(xùn)練和識別方法,極大地提高了交通標(biāo)識識別的準(zhǔn)確率;另一方面通過快速的交通標(biāo)識檢測算法定位交通標(biāo)識的候選區(qū)域,極大地減少了識別所需要的時間。圖4給出了3幅交通標(biāo)識識別的識別結(jié)果圖像。
2019-08-08 10:04:036234 為了準(zhǔn)確、自動地提取蝗蟲信息進(jìn)行蝗災(zāi)測報,提出了一種基于機器視覺的草地蝗蟲識別方法,用于超低空蝗災(zāi)預(yù)警系統(tǒng)所自動采集的視頻中草地蝗蟲頭數(shù)信息的提取。該方法先根據(jù)躍起草地蝗蟲的背景構(gòu)成,把原始圖像分為
2020-07-29 14:35:254 機器視覺技術(shù)使用圖像識別算法來識別圖像中的物體,并在不影響諸如工業(yè)自動化、機器人技術(shù)、無人機和3D建模等廣泛應(yīng)用的情況下,為物體提供更詳細(xì)準(zhǔn)確的圖像而不會造成變形。
2020-12-28 14:16:365674 針對變電站巡檢機器人導(dǎo)航精度低與巡檢點識別魯棒性差的問題,提岀一種采用動態(tài)雙窗口的視覺導(dǎo)航與路徑特征識別方法。根據(jù)導(dǎo)航圖像匹配結(jié)果和相機位姿偏差動態(tài)設(shè)置導(dǎo)航窗口,將圖像由傳統(tǒng)的紅綠藍(lán)顏色空間轉(zhuǎn)換
2021-03-23 16:01:222 遙感圖像船舶識別是目標(biāo)識別的一個重要領(lǐng)域,在海防和救援方面具有重大應(yīng)用價值。但遙感圖像中的船舶普遍存在云霧遮擋、陸地背景干擾和體積小等因素所造成的識別難的問題。為了能準(zhǔn)確識別復(fù)雜場景下船舶目標(biāo),在網(wǎng)
2021-04-21 11:26:4418 相結(jié)合,提岀了一種基于可變形卷積神經(jīng)網(wǎng)絡(luò)的數(shù)顯儀表示數(shù)分割與識別方法。該方法包含圖像預(yù)處理、字符分割與識別等步驟。首先,使用 Gray World算法對待識別圖像進(jìn)行亮度均衡,并通過彩色分割提取屏幕區(qū)域;其次,對圖像進(jìn)行形態(tài)學(xué)操作
2021-05-10 11:14:0610 隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。
2022-11-09 17:00:441227 隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。
傳統(tǒng)方法做目標(biāo)識別大多都是靠人工實現(xiàn),從形狀、顏色、長度、寬度、長寬比來確定被識別的目標(biāo)是否符合標(biāo)準(zhǔn),最終
2023-02-07 12:00:07701 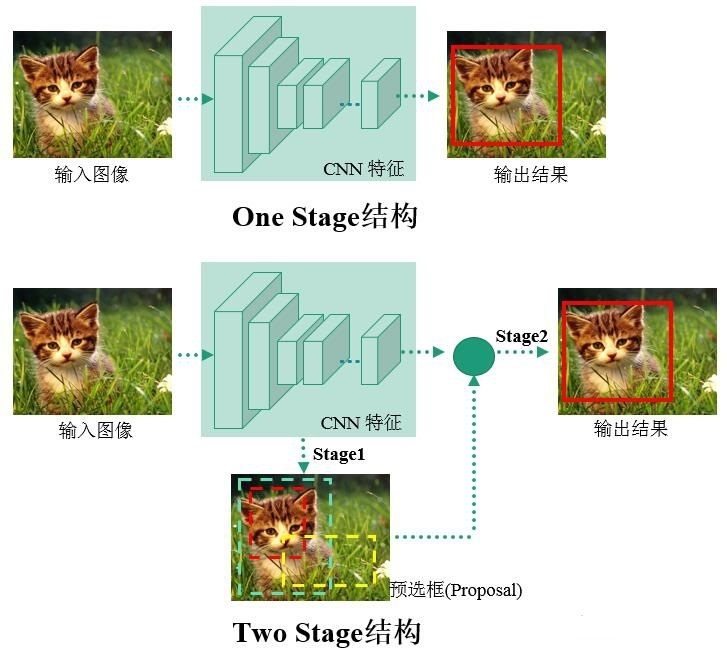
機器視覺檢測是指在圖像或視頻中識別和定位具有特定特征的目標(biāo)的過程,通常涉及目標(biāo)識別、目標(biāo)跟蹤、目標(biāo)分割等任務(wù)。它是機器視覺領(lǐng)域中最核心和最基礎(chǔ)的技術(shù)之一,具有廣泛的應(yīng)用前景。
2023-05-08 09:34:52328 來源:機器視覺沙龍隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。傳統(tǒng)方法做目標(biāo)識別大多都是靠人工實現(xiàn),從形狀、顏色、長度、寬度、長寬比來確定被識別的目標(biāo)是否符合
2022-12-15 10:44:10619 
、理解和處理圖像或視頻數(shù)據(jù),以實現(xiàn)自動化的視覺分析和決策。機器視覺通過使用各種算法和模型,對圖像或視頻進(jìn)行各種處理和分析,例如目標(biāo)識別、圖像分類、目標(biāo)檢測、圖像分割
2023-08-07 08:09:11608 
“識別方法: 電容的識別方法與電阻的識別方法基本相同分直標(biāo)法、色標(biāo)法和數(shù)標(biāo)法3種電容的基本單位用法拉(F)表示其它單位還有:毫法(mF)、微法(uF)、納法(nF)、皮法(pF)其中:1法拉=103
2023-10-17 09:40:162 文章來源:MEMS引言從20世紀(jì)80年代開始,機器視覺技術(shù)的發(fā)展速度不斷加快,已經(jīng)走進(jìn)了人們的日常生活與工作之中。機器視覺的圖像目標(biāo)識別系統(tǒng)的自動化程度較高,應(yīng)用范圍廣,尤其在危險場所的運用,采用
2024-02-23 08:26:49280 隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。傳統(tǒng)方法做目標(biāo)識別大多都是靠人工實現(xiàn),從形狀、顏色、長度、寬度、長寬比來確定被識別的目標(biāo)是否符合標(biāo)準(zhǔn),最終定義出
2024-03-14 08:26:20224 機器視覺缺陷檢測技術(shù)在工業(yè)生產(chǎn)、醫(yī)療影像、安防監(jiān)控等領(lǐng)域有著廣泛的應(yīng)用,能夠提高產(chǎn)品質(zhì)量、生產(chǎn)效率和安全性。機器視覺缺陷檢測原理機器視覺缺陷檢測是利用計算機視覺技術(shù)來檢測和識別產(chǎn)品表面的缺陷,首先
2024-03-18 17:54:40276 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論