fs from \'@ohos.file.fs\';
// 定義并發(fā)函數,內部密集調用I/O能力
@Concurrent
async function concurrentTest(fileList
2024-03-21 14:57:56
Promise和async/await提供異步并發(fā)能力,適用于單次I/O任務的場景開發(fā),本文以使用異步進行單次文件寫入為例來提供指導。
實現單次I/O任務邏輯。
import fs from
2024-03-04 14:07:08
您好,
我們根據官方推薦使用了S25FS128S作為FX3的SPI Flash,將固件下載到Flash內以后,重新上電,設備仍然顯示為bootloader,不能正常啟動設備。
我們嘗試了將SPI
2024-02-28 08:02:42
大眾新款1.5T引擎助力節(jié)能低碳,能否超越同級競爭對手? 在過去,評價發(fā)動機強不強,主要是看功率和扭矩,這種過于參數化的評價方式,非常單一,導致市場出現了一批高參數、低性能、高油耗的低品質發(fā)動機。
2024-01-25 10:30:59 311
311 產品摘要正運動技術PCIE464運動控制卡,提供高效的工業(yè)運動控制解決方案。用戶可直接將PCIE464嵌入標準PC機快速實現高性能的EtherCAT運動控制功能。在“PC+運動控制卡”的模式下,可
2024-01-24 09:48:21
大佬們好!
小弟最近在學習 S5PV210 的時候遇見了一些關于 G2D 引擎的疑惑,有沒有大佬好心幫幫忙,小弟在這里先謝過了 !
我嘗試在裸機環(huán)境下面配置 S5PV210 的 G2D 引擎相關
2024-01-04 21:56:29
這幾天一直在調試AD2S1200,現在遇到一個問題一直沒法解決,請各位幫我看看,當旋轉變壓器轉到270o~360o之間的時候,AD2S1200解出的是0~90o,不知問題出在哪里?
我用的旋轉
2023-12-27 06:06:39
工作效率大大提 高。1000個分布式I/O數據的刷新周期僅為30μs,其中包括端子循環(huán)時間。與100個伺服軸的通訊只需100μs。在此期間,可以向所有軸提供設置值和控制數據,并報告它們的實際位置和狀態(tài)
2023-12-13 11:37:40
直流電動機軸的端頭連接一個測速機,因為運行時間長久,發(fā)生損壞。更新一個不是很容易(位置、幾何形狀)如何判斷測速機的好壞呢。
2023-12-13 08:21:17
通信用來控制各個伺服電機的同步,確實是簡化了機械,也使得控制更加靈活高效,更改工藝只需要換一套參數即可達到目的。但有一個比較困擾我的問題是,在大慣量的運動部件使用永磁同步電動機驅動時,供電突然中斷
2023-11-14 06:35:32
N56系列直線壓電馬達是采用壓電微驅動技術,即利用壓電微位移致動器實現高精度定位和運動的技術,將壓電陶瓷在一定電場作用下的微變形量,經過結構轉換,輸出宏動直線毫米級行程。 直線壓電馬達原理 N56
2023-11-09 09:28:33311 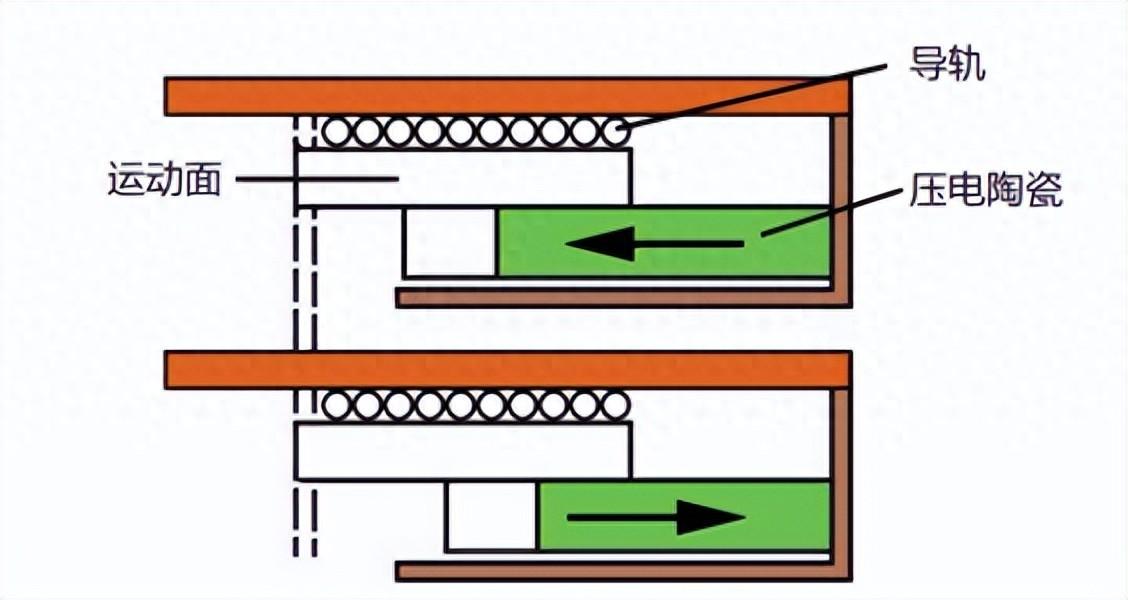
電子發(fā)燒友網站提供《FS2405/FS2405B降壓轉換器英文規(guī)格書.pdf》資料免費下載
2023-11-05 16:44:54 0
0 電子發(fā)燒友網站提供《一種全方位移動機器人的運動分析與控制實現.pdf》資料免費下載
2023-10-30 09:49:470 用單片機如何控制三相異步電動機的速度
2023-10-27 06:51:59
全國產EtherCAT運動控制邊緣控制器ZMC432H是正運動的一款軟硬件全國產自主可控,運動控制接口兼容EtherCAT總線和脈沖型的獨立式運動控制器,最多支持32軸運動控制,同時支持正運動遠程HMI功能,能提供網絡組態(tài)顯示,可實時監(jiān)控和調整參數配置。
2023-10-16 09:49:53422 
怎么用單片機獲取一個物體運動的初始速度
2023-10-11 07:23:00
ucos-ii如何向任務傳遞參數?
2023-10-11 06:48:15
全國產EtherCAT運動控制邊緣控制器的軸參數設置與單軸運動例程講解。
2023-09-27 15:42:26353 
電動機的數字控制是電動機控制的發(fā)展趨勢,用單片機對電動機進行控制是實現電動機數字控制最常用的手段。本書詳盡、系統(tǒng)地介紹了常用的直流電動機、交流電動機、步進電動機、無刷直流電動機、交永磁同步伺服電動機
2023-09-22 07:05:56
電子秤采用現代傳感器技術、電子技術和計算機技術一體化的電子稱量裝置,才能滿足并解決現實生活中提出的
2023-09-22 06:52:32
運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電器控制電動機正反轉或轉一會停一會再轉一會再停。
2023-09-21 16:26:411760 
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現實 (VR )環(huán)境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結果表明
2023-09-20 06:24:09
電子秤總的發(fā)展趨勢是小型化、模塊化、集成化、智能化;其技術性能趨向是速率高、準確度高、穩(wěn)定性高、可靠性高;其功能趨向是稱重計量的控制信息和非控制信息并重的“智能化”功能;其應用性能趨向于綜合性和組合
2023-09-19 07:44:39
運動控制
? 精確的位置控制 – 多軸協(xié)調 – 選擇放置, 成形切削 – 自動化測試, DUT處理 ? 精確的速度控制 – 傳送帶,變速電動機
? 高速I/O同步
2023-09-19 06:25:20
全稱量在30-300Kg以內的電子秤3.地磅指全稱量在300Kg以上的電子秤4.精密天平
第四種按精確度分類:Ⅰ級:特種天平精密度≥1/10萬II級:高精度天平1/1萬≤精密度<1
2023-09-15 11:22:40
1、轉子發(fā)動機——內燃機的一種,把熱能轉為旋轉運動而非活塞運動
2、汽車等速萬向節(jié),這就是為啥前輪驅動的汽車的輪子還能轉
3、直列式發(fā)動機——它的汽缸肩并肩地排成一排,一般的車都用。
2023-08-30 11:38:54424 
產品概述運動粘度儀,符合GB/T265-1988《石油產品運動粘度測定法和動力粘度計算法》,適用于測定液體石油產品(牛頓液體)的運動粘度,該方法是指在某一恒定溫度下,測定一定體積的液體在
2023-07-31 10:53:29
電動機型號是便于使用、設計、制造等部門進行業(yè)務聯(lián)系和簡化技術文件中產品名稱、規(guī)格、型式等敘述而引用的一種代號。本文分享電動機型號含義等信息。
2023-07-23 15:36:372059 
本篇文章將介紹如何使用物理引擎和圖撲 3D 可視化技術來呈現冰壺運動的模擬。
2023-07-18 10:36:36280 
R8C/56E 組, R8C/56F 組, R8C/56G 組, R8C/56H 組 數據表
2023-07-14 19:01:470 QSpan II User 手冊
2023-07-14 09:42:440 R8C/56E 組, 56F 組,56G 組, 56H 組 用戶手冊
2023-07-12 19:20:580 8T33FS6222 數據表
2023-07-11 20:37:460 8V43FS92432 Final 數據表
2023-07-11 19:18:380 FRC5000系列叉式移動機器人控制器,適用各類常見的叉式移動機器人,內置激光導航算法,支持單舵輪、雙舵輪底盤運動模型。FRC5000系列自帶豐富的I/O資源和各種通訊接口,支持CANopen
2023-07-11 10:26:45
MRC3100系列AMR移動機器人控制器,適用潛伏頂升式、協(xié)作(復合)式、輥筒式等差速底盤類型移動機器人,內置激光導航及二維碼導航算法,支持差速底盤運動模型。MRC3100系列自帶豐富的I/O資源
2023-07-11 10:12:02
FS2012 數據表
2023-07-06 20:40:220 FS1012 數據表
2023-07-06 20:00:580 8T33FS6221 數據表
2023-07-04 19:01:480 FS3000 數據表
2023-06-30 20:29:350 FS1015 數據表
2023-06-30 20:28:420 FS1023 數據表
2023-06-30 19:37:520 FS1023-DG 數據表
2023-06-30 19:37:150 FS1025 數據表
2023-06-30 19:36:220 FS1027 數據表
2023-06-30 19:35:020 則提供了對多臺移動機器人進行管理的功能,包括機器人的電量控制、狀態(tài)監(jiān)測、報警處理等。
上位機軟件主要由2個主界面組成:主從機的登錄通信模塊以及移動機器人當前話題列表和運動信息顯示界面、可視化界面以及
2023-06-28 09:36:32
FS50UMJ-3 數據表
2023-06-26 19:56:430 ,同時縮小工控機體積;
5、ECI運動控制卡內部可寫部分代碼,實時性要求特別高的場合也適用;
6、對于環(huán)境不好的場合,時間長了工控機容易進灰塵,ECI運動控制卡可靠穩(wěn)定不受影響。
2023-06-13 09:44:20
門的開閉都用步進電機驅動。
三.系統(tǒng)軟件設計組合秤在工作時,要完成70 包/ min(1 包/s)以上的能力,即至少要在1s 鐘內完成重量檢測、組合計算、查找最佳組合等,從而完成一次包裝,其中組合
2023-06-09 11:12:56
。*/
}
printf("Sbc_fs26_InitDevice:%s\r\n",OKtoSTR(eReturnValue));
eReturnValue
2023-06-09 07:41:06
我希望有人可以驗證/澄清數據表(修訂版 7)中的一些段落。
通道
12.3:啟用DFS時,FS狀態(tài)機監(jiān)控并統(tǒng)計發(fā)生的故障。
問題
如果禁用DFS,FS狀態(tài)機是否 不監(jiān)控和統(tǒng)計發(fā)生的故障
2023-06-09 06:10:46
發(fā)展緩慢,并沒有掌握核心科技。總體來看,國內電子秤發(fā)展欠缺,電子秤技術沒有掌握核心,電子秤發(fā)展存在廣闊的發(fā)展空間。2、項目簡介2.1項目描述
本文基于單片機小凌派RK2206設計了一款智能化電子秤,可
2023-05-27 13:46:51
R8C/56E 組, 56F 組,56G 組, 56H 組 用戶手冊
2023-05-15 20:28:190 8T33FS6111 數據表
2023-05-15 19:58:140 運動控制器就是控制電動機的運行方式專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電器控制電動機正反轉或轉一會停一會再轉一會
2023-05-09 14:41:02707 FS30KMJ-3 數據表
2023-05-06 18:15:260 FS50UM-3 數據表
2023-05-06 18:14:020 FS50VSJ-2 數據表
2023-05-06 18:10:530 FS50UMJ-3 數據表
2023-05-06 18:10:390 你好
我們在設計中使用 FS2633 SBC 和 S32k144 uC。在 uC S32k144 中,我們可以將哪些引腳連接到 SBC FS2633 FS0B 和 FS1B。
2023-05-06 09:05:04
如何使用 QDR(TM) II SRAM 和 DDR II SRAM 用戶手冊
2023-04-27 20:25:406 RD2.0FS 至 RD120FS 數據表 (D18883EJ1V0DS00)
2023-04-26 20:19:580 FS50ASJ-03F 數據表
2023-04-26 19:17:390 FS30AS-2 數據表
2023-04-26 19:15:200 FS10AS-3 數據表
2023-04-26 19:15:020 FS5ASJ-3 數據表
2023-04-26 19:14:480 FS5ASJ-2 數據表
2023-04-26 19:14:270 FS5AS-06 數據表
2023-04-26 19:14:080 FS10AS-2 數據表
2023-04-26 19:13:030 FS5AS-2 數據表
2023-04-26 19:12:450 與低噪聲放大器耦合時能夠具有非常高的靈敏度,適用于高達 56 Gb/s NRZ 和 112 Gb/s PAM4 調制的傳輸應用。該 APD 采用專有設計用于高量子效率和
2023-04-23 15:47:05
我想在基于 S32K322 的項目中包含 FS26 sbc 驅動程序。遺憾的是,我無法使用此 MCU 執(zhí)行此操作,而當我使用 S32K344 作為我的 MCU 時,我可以執(zhí)行此操作(請參閱附件)。我
2023-04-23 08:01:27
德國柏林,2023年4月10日——專業(yè)音頻領先品牌之一諾音曼(Neumann),宣布推出KH 120 II錄音棚監(jiān)聽音箱。在上一代產品的成功基礎上,KH 120 II在所有聲學參數方面都有進一步提升
2023-04-21 14:59:58418 
運動控制器就是控制電動機的運行方式專用控制器:比如電動機在由行程開關控制交流接觸器而實現電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電器控制電動機正反轉或轉一會停一會再轉一會再停。
2023-04-21 10:14:31739 PowerSpan II User 手冊
2023-04-20 18:51:260 FS26 SBC 是否有引腳到引腳替換芯片,如 FS65?我們需要提供 MCU,但我們不想使用 FS26。
2023-04-19 11:46:09
F807非常適合許多應用。56F807包括許多外圍設備特別適用于運動控制、智能電器、步進器、編碼器等應用,轉速表、限位開關、電源和控制、汽車控制、發(fā)動機管理、噪音抑制、遠程公用設施計量、電力、照明和自動化的工業(yè)控制。
2023-04-19 09:13:560 MC33FS4508如何配置看門狗32ms刷新時間參數,如何配置達到上電200ms內接收CAN報文的目的
2023-04-11 07:20:10
單向運轉的電動機變成點運動狀態(tài),可能是電路哪里出現故障了?
2023-04-07 11:54:36
R8C/56E 組, R8C/56F 組, R8C/56G 組, R8C/56H 組 數據表
2023-04-04 19:28:270 QSpan II User 手冊
2023-03-31 19:31:540 伺服電動機(Servo Motor)是一種適用于精密運動控制的電動機,它通過使用反饋控制系統(tǒng)實現對位置、速度和加速度等參數的高精度控制。相對于傳統(tǒng)的普通電動機和步進電動機,伺服電動機在運動平穩(wěn)性、定位精度、速度控制和重復性等方面具有更高的性能。
2023-03-31 18:06:282548 我想使用 SBC FS6500 (MC33FS6523CAE) 為 s32k344 172 MaxQFP 微控制器供電。如何在 SBC 上為 s32k344 內核生成 1.5V 電壓?這個電壓水平的 SBC 設置是什么?
2023-03-27 08:19:08
我們有一塊配備 FS26 SBC 的 NXP BMU 板。 我正在嘗試使用一個簡單的看門狗算法來讓 SBC 開心。 我關注了 Wdg_FS
2023-03-27 06:24:46
請問MPC56XX的CW2.10可以嗎?如何使用CW2.10(for MPC56XX)制作庫?我嘗試使用 S08 或 S12 的社區(qū)指南進行操作,但它不適用于 CW2.10。我認為我犯了一些錯誤,但我沒有找到根本原因。我希望為它找到一些參考/示例。
2023-03-24 06:51:11
改變電動機轉動方向可以同時對調電源的正負極和磁體的N+S級嗎?
2023-03-23 09:56:35
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網監(jiān)
工商網監(jiān)
評論