伺服編碼器分辨率指的是編碼器能夠提供的位置或運(yùn)動(dòng)信息的精度或精確度,具體表現(xiàn)為編碼器能夠?qū)⑦\(yùn)動(dòng)轉(zhuǎn)換為脈沖或位置信號(hào)的精細(xì)程度。通常以線數(shù)(Lines)或脈沖數(shù)(Pulses)來(lái)表示編碼器的分辨率
2024-03-21 08:43:30 31
31 
和編碼器軸端用一個(gè)塑料件的空心圓柱連接,我不太清楚這個(gè)塑料圓柱具體叫什么,兩者連接確保轉(zhuǎn)速一致,現(xiàn)在有一個(gè)問(wèn)題,不知道是編碼器質(zhì)量問(wèn)題還是安裝的問(wèn)題,就是在電機(jī)旋轉(zhuǎn)的時(shí)候編碼器有一點(diǎn)偏離,沒(méi)有和電機(jī)同心
2024-03-06 17:34:21
差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。下面是將差分編碼器信號(hào)接入PLC的一般步驟: 1.
2024-03-05 08:42:4980 
編碼器脈沖數(shù)的選擇原則
1. 分辨率需求:編碼器的分辨率決定了脈沖數(shù)的選擇。在符合應(yīng)用需求的前提下,應(yīng)選擇盡可能高的分辨率,以提高測(cè)量精度。
2、依據(jù)轉(zhuǎn)速要求選取:依據(jù)設(shè)備的工作速度要求來(lái)選擇編碼器
2024-03-01 13:36:08172 
差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。
2024-02-26 14:43:57474 我有一個(gè)圖像 EVAL_PASCO2_SENSOR,支持高達(dá) 3840x2160 分辨率的超高速和高速。
我能以超快的速度拍攝所有靜止畫(huà)面。 但是,當(dāng)我嘗試獲得更高分辨率(3840x2160)的靜態(tài)
2024-02-22 07:58:43
按照編碼器支持的分辨率可以把編碼器分成標(biāo)清編碼器、高清編碼器、全高清編碼器,分辨率越高幀率越高視頻就越清楚。 1.編碼器的分辨率是什么意思 編碼器的分辨率是指編碼器以每旋轉(zhuǎn)360度提供
2024-02-21 18:07:31492 
編碼器零點(diǎn)位置怎么看 要確定編碼器的零點(diǎn)位置,可以通過(guò)以下幾種方式進(jìn)行觀察: 1. 物理標(biāo)記點(diǎn):一些編碼器在其旋轉(zhuǎn)軸上具有專門(mén)的物理標(biāo)記點(diǎn),例如凹槽或凸起。通過(guò)觀察軸上的標(biāo)記點(diǎn),可以確定零點(diǎn)位置
2024-02-18 18:28:19729 
在本教程中,您將學(xué)習(xí)如何將增量旋轉(zhuǎn)編碼器與Arduino連接,以讀取旋鈕的運(yùn)動(dòng)。這對(duì)于在機(jī)器人和其他應(yīng)用程序中創(chuàng)建用戶界面或讀取機(jī)械位置非常有用。
2024-02-11 10:00:00253 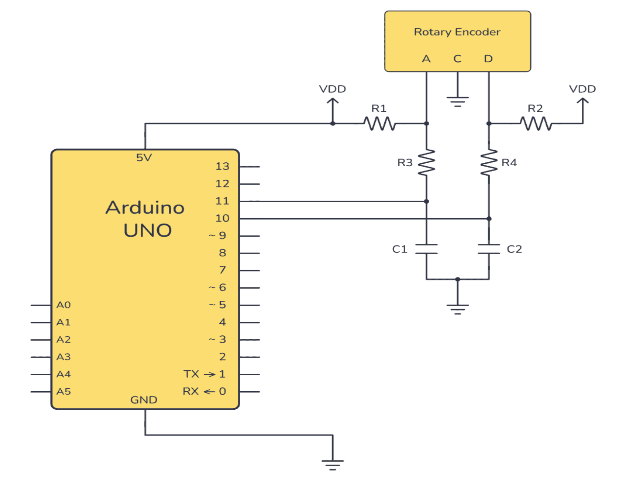
旋轉(zhuǎn)編碼器是用于測(cè)量軸或軸旋轉(zhuǎn)的組件。它們通常用于音頻設(shè)備、DIY 游戲控制器中的音量旋鈕,或用作不同 Arduino 或 Raspberry Pi 項(xiàng)目的輸入設(shè)備。
2024-02-11 09:53:00597 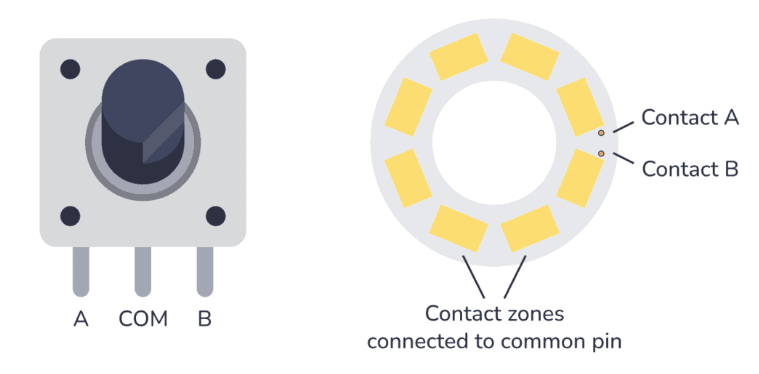
嗨,我正在使用低電平分辨率編碼器來(lái)控制 PMSM,我有一個(gè)問(wèn)題,如何準(zhǔn)確計(jì)算低電平分辨率編碼器 TLE9243QK_BASE_BOARD 的速度?
2024-01-22 07:08:21
尊敬的各位:有了“EVAL_6EDL7141_FOC_3SH”,我的 WM_MOTOR_CONTROL_01 就轉(zhuǎn)過(guò)身來(lái)了。我該如何估計(jì)/計(jì)算, WM_MOTOR_CONTROL_01 旋轉(zhuǎn)分辨率
2024-01-22 06:09:22
一些編碼器會(huì)在其旋轉(zhuǎn)軸上標(biāo)記一個(gè)特殊的標(biāo)記點(diǎn),例如一個(gè)凹槽或凸起。通過(guò)在編碼器旋轉(zhuǎn)到特定位置時(shí)對(duì)標(biāo)記點(diǎn)進(jìn)行檢測(cè),可以確定零位。
2024-01-18 14:49:40219 很快提供SSI通信接口,提供與數(shù)字plc和微控制器的無(wú)縫集成。新的SSI編碼器提供高達(dá)18位的分辨率,并且都可以使用POSITAL的用戶友好的ubifast編程工具
2024-01-18 14:03:35
伺服電機(jī)編碼器是一種關(guān)鍵的反饋裝置,用于測(cè)量和控制電機(jī)的轉(zhuǎn)速和位置。在選擇伺服電機(jī)編碼器時(shí),常常面臨一個(gè)選擇:使用磁電編碼器還是光電編碼器。接下來(lái)將從幾個(gè)關(guān)鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02462 編碼器是一種將機(jī)械運(yùn)動(dòng)轉(zhuǎn)換為數(shù)字電信號(hào)的傳感器。當(dāng)駕駛員想要控制電機(jī)旋轉(zhuǎn)時(shí),U、V、W三相電氣輸出驅(qū)動(dòng)電機(jī)運(yùn)行。為了將電機(jī)轉(zhuǎn)到某個(gè)位置或角度,我們將此位置稱為目標(biāo)值。我們需要知道此時(shí)電機(jī)轉(zhuǎn)動(dòng)的幅度
2024-01-17 17:02:12326 
如題,新唐的pwm一般都是16bit, 其實(shí)也可以利用預(yù)分頻比來(lái)提高一些所謂的分辨率.
現(xiàn)在有這樣一個(gè)需求. 要求脈寬在0-65535us之間連續(xù)可調(diào), 周期,也類似.但是肯定要大于65535,連續(xù)
2024-01-16 08:30:44
編碼器分為旋轉(zhuǎn)編碼器和線性編碼器兩種。旋轉(zhuǎn)編碼器用于檢測(cè)旋轉(zhuǎn)位置和速度,而線性編碼器用于檢測(cè)直線位置和速度。
2023-12-22 09:20:04380 
在與使用模數(shù)轉(zhuǎn)換器(ADC)的系統(tǒng)設(shè)計(jì)人員進(jìn)行交談時(shí),我最常聽(tīng)到的一個(gè)問(wèn)題就是:
“你的16位ADC的精度也是16位的嗎?”
這個(gè)問(wèn)題的答案取決于對(duì)分辨率和精度概念的基本理解。盡管是兩個(gè)完全
2023-12-20 06:55:22
“分辨率”是用來(lái)描述刻度劃分的。從定義上看,這兩個(gè)量應(yīng)該是風(fēng)馬牛不相及的。(是不是有朋友感到愕然^_^)。很多賣(mài)傳感器的JS就是利用這一點(diǎn)來(lái)糊弄人的了。簡(jiǎn)單做個(gè)比喻:有這么一把常見(jiàn)的塑料尺(中學(xué)生用
2023-12-19 06:41:18
有個(gè)增量式編碼器的分辨率是2500脈沖每轉(zhuǎn),把編碼器安裝在被測(cè)物體上,那這個(gè)物體轉(zhuǎn)一周是多少個(gè)脈沖?
2023-12-18 07:04:36
效位數(shù)降低。
峰峰值分辨率
大多數(shù)應(yīng)用不希望在系統(tǒng)輸出時(shí)看到碼閃爍。例如,對(duì)于電子秤應(yīng)用,無(wú)閃爍位數(shù)很重要。可以將ADC產(chǎn)生的數(shù)字字截?cái)啵沟迷陔娮映颖O(jiān)視器上看不到閃爍位。
無(wú)噪聲分辨率或峰峰
2023-12-15 07:56:29
ad2s1210 傳真: ad2s1210能夠解調(diào)得到光電編碼器一樣的ABZ信號(hào),但是關(guān)于其默認(rèn)的線數(shù)為多大,并沒(méi)有明確說(shuō)明,我了解可以通過(guò)通信的方式設(shè)置其線數(shù),并且編碼器分辨率不能高于旋變輸出
2023-12-01 07:12:37
要實(shí)現(xiàn)多種分辨率視頻接收時(shí),ADV7612寄存器該如何配置?
2023-11-28 06:25:38
峰值噪聲與有效噪聲的區(qū)別,峰值分辨率與有效分辨率的區(qū)別?無(wú)失碼分辨率又是指的什么?
2023-11-27 11:42:59
您好,
請(qǐng)問(wèn)有采樣率250MHz左右 分辨率為12位,管腳兼容8位分辨率的adc嗎?
謝謝!
2023-11-21 06:46:46
旋轉(zhuǎn)式編碼器可以精確地測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)。它們通常收集關(guān)于繞旋轉(zhuǎn)軸運(yùn)動(dòng)變化的信息。盡管它們非常精確。然而,在為發(fā)動(dòng)機(jī)選擇正確的編碼時(shí),技術(shù)工程師需要考慮對(duì)發(fā)動(dòng)機(jī)性能影響最大的編碼器的五個(gè)主要特性:定位精度、速度穩(wěn)定性、聲音噪聲、功率損耗和帶寬。
2023-11-20 17:46:28298 在選型1FK7伺服電機(jī)時(shí),對(duì)旋變編碼器,看得模糊SIZER區(qū)分有多極旋變、單極旋變、14位旋變、15位旋變,在一般常識(shí)中,知道有多極、單極之分,但14/15位是是否也是單極或多極的分支?即不分單極或多極,最終分辨率就是14位、15位?
性價(jià)比上,這些旋變,哪款高些?
2023-11-16 06:14:31
AD5522的輸出電壓跨度在22.5V左右,對(duì)應(yīng)16bit的DAC的分辨率約22.5V/65536=343uV。
如果我想提高到170uV左右的分辨率,但是又要保持輸出電壓跨度22.5V不變需要用
2023-11-15 08:20:44
旋轉(zhuǎn)編碼器更換步驟第一步,卸開(kāi)電機(jī)后蓋,編碼器的后蓋。第二步,松開(kāi)編碼器安裝螺絲。第三步,旋轉(zhuǎn)電機(jī)轉(zhuǎn)子軸,使編碼器轉(zhuǎn)子上的標(biāo)志和編碼器殼上的標(biāo)志重合。第四步,卸下編碼器,注意在裝卸的時(shí)候盡量使用特制
2023-11-12 08:07:20756 
求教,怎么調(diào)整andriod輸出分辨率,適配分辨率大的屏
2023-11-06 07:13:42
ds18b20的分辨率是什么意思??
2023-11-03 07:42:59
一體式伺服編碼器的位數(shù)表示編碼器的分辨率,即它可以測(cè)量和反饋的位置或運(yùn)動(dòng)的精度。具體來(lái)說(shuō),位數(shù)指的是編碼器輸出的二進(jìn)制數(shù)的位數(shù),可以理解為編碼器能夠提供的離散位置或角度的精確度。 通常,一體式伺服
2023-10-27 09:55:011532 
多圈編碼器和單圈編碼器區(qū)別:多圈編碼器一般由兩個(gè)或更多個(gè)同心環(huán)構(gòu)成,每一個(gè)環(huán)上都有一個(gè)光電傳感器和一個(gè)光柵盤(pán)。當(dāng)軸旋轉(zhuǎn)時(shí),每一個(gè)光柵盤(pán)也會(huì)隨之旋轉(zhuǎn),并且通過(guò)光電傳感器產(chǎn)生脈沖信號(hào)。因?yàn)槎嗳?b class="flag-6" style="color: red">編碼器具備高精度、高分辨率等特點(diǎn),所以在必須高精度測(cè)量的場(chǎng)合得到了廣泛的應(yīng)用。比如機(jī)床、印刷機(jī)械等行業(yè)。
2023-10-23 14:14:352121 
旋轉(zhuǎn)編碼器有兩種類型-絕對(duì)式和增量式。絕對(duì)編碼器為我們提供旋鈕的精確位置(以度為單位),而增量編碼器報(bào)告軸已移動(dòng)了多少增量。
2023-10-19 17:20:30219 
伺服器編碼器的精度和分辨率會(huì)影響什么?
2023-10-18 07:23:07
屏幕分辨率和屏幕亮度在驅(qū)動(dòng)時(shí)怎么調(diào)節(jié)
2023-10-16 07:59:53
ADC的采樣頻率和分辨率有什么關(guān)系嗎?
2023-10-15 08:24:49
相比較,SSI編碼器具備高分辨率、高精度和抗干擾能力強(qiáng)的特點(diǎn)。因而,當(dāng)需要高精度測(cè)量和控制的場(chǎng)合中得到廣泛應(yīng)用。
2023-10-13 11:24:191665 
在旋轉(zhuǎn)、直線編碼器及磁柵尺中得到廣泛應(yīng)用的兩款產(chǎn)品:“磁性傳感器”及“插補(bǔ)細(xì)分器”。
2023-10-12 18:17:13499 旋轉(zhuǎn)編碼器是一種位置傳感器,可將旋鈕的角位置(旋轉(zhuǎn))轉(zhuǎn)換為用于確定旋鈕旋轉(zhuǎn)方向的輸出信號(hào)。
2023-10-12 16:56:34325 
怎么用旋轉(zhuǎn)編碼器獲取一個(gè)物體的加速度
2023-10-11 07:09:22
光電編碼器的分辨率表示什么意義
2023-10-11 06:47:27
包含詳細(xì)說(shuō)明+代碼在本教程中,我們將學(xué)習(xí)旋轉(zhuǎn)編碼器的怎樣工作的,以及如何使它與Arduino配合使用。旋轉(zhuǎn)編碼器是一種位置傳感器,用于確定旋轉(zhuǎn)軸的角度位置。
2023-09-26 07:52:23
接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。編碼器根據(jù)其旋轉(zhuǎn)方式可以分為多圈編碼器和單圈編碼器。多圈編碼器在其主軸上擁有多個(gè)磁場(chǎng)傳感器或光柵
2023-09-22 08:08:551190 轉(zhuǎn)子位置測(cè)量的分辨率? 空間量化轉(zhuǎn)子位置影響的建模? 傳感器分辨率對(duì)速度估計(jì)的影響? 變頻驅(qū)動(dòng)器基于模型的速度估計(jì)算法:? 矢量跟蹤觀測(cè)器? 速度控制回路的調(diào)整? 位置傳感器分辨率的選擇? 變頻
2023-09-07 07:10:22
伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來(lái)測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來(lái)分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場(chǎng)上
2023-08-25 08:09:031589 一種將角位移或者角速度轉(zhuǎn)換成一連串電數(shù)字脈沖的旋轉(zhuǎn)式傳感器,我們可以通過(guò)編碼器測(cè)量到位移或者速度信息。編碼器通常由一個(gè)旋轉(zhuǎn)部分和一個(gè)固定部分組成,旋轉(zhuǎn)部分隨著被測(cè)量的物體進(jìn)行旋轉(zhuǎn),固定部分則保持不動(dòng)。當(dāng)旋轉(zhuǎn)部分發(fā)生旋轉(zhuǎn)時(shí),編碼器會(huì)產(chǎn)生一系列的電數(shù)字脈沖信號(hào),這些脈沖信號(hào)可以用來(lái)確定旋轉(zhuǎn)角度或角速度。
2023-08-21 11:50:005002 
光學(xué)編碼器由于功能類似,很難比較。磁性編碼器作為一種以數(shù)字形式提供附著在機(jī)械軸上的磁體角度的器件,常用“分辨率”作為其關(guān)鍵的規(guī)格參數(shù),用它來(lái)代表傳感器能夠辨識(shí)的最小角度。然而,由于在宣傳和技術(shù)文檔
2023-08-18 17:05:04631 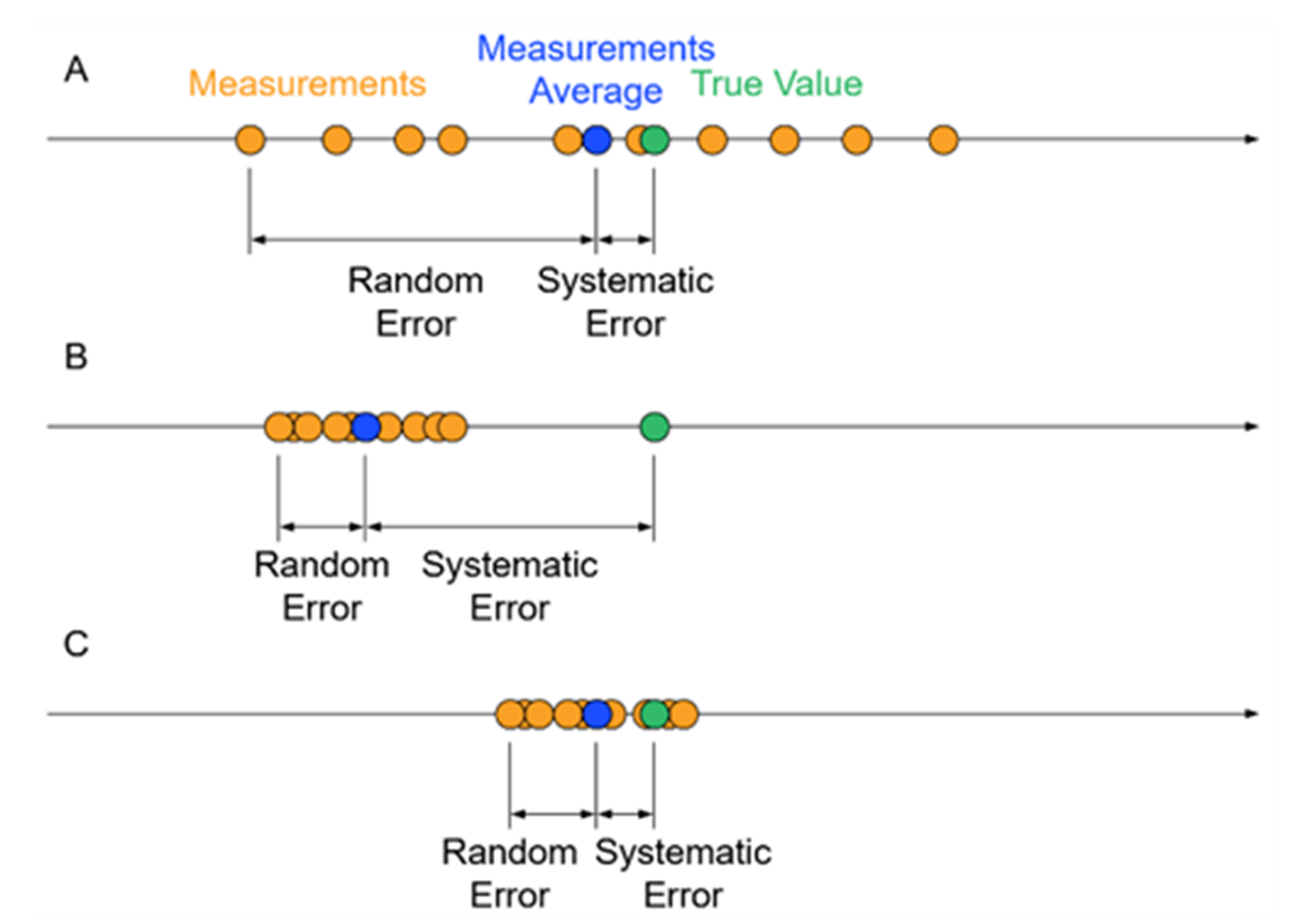
增量式編碼器的分辨率是以編碼器軸轉(zhuǎn)動(dòng)一周所產(chǎn)生的輸出信號(hào)基本周期數(shù)來(lái)表示的,即脈沖數(shù)/轉(zhuǎn)(PPR)。本文主要介紹選擇增量編碼器分辨率的方法以及影響增量式編碼器分辨率的因素。
2023-07-26 09:59:56725 絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)位置或線性位移的傳感器。與增量編碼器不同,絕對(duì)值編碼器可以提供特定位置的唯一輸出值,而不需要進(jìn)行校準(zhǔn)。這使得絕對(duì)值編碼器在需要高精度位置測(cè)量的應(yīng)用中非常有用,例如機(jī)器人、自動(dòng)化系統(tǒng)和醫(yī)療設(shè)備。
2023-07-26 09:53:329949 光電編碼器的使用場(chǎng)合很多,很多地方都可以用到,進(jìn)行角度測(cè)量,長(zhǎng)度測(cè)量,速度測(cè)量,位置測(cè)量都可以,本文將詳細(xì)介紹如何選擇光電編碼器以及選擇光電編碼器是需要考慮的因素。
2023-07-21 14:38:20693 我們知道編碼器的種類有很多,什么增量式編碼器、絕對(duì)值編碼器、光電編碼器、旋轉(zhuǎn)編碼器等等。
2023-07-13 14:26:194176 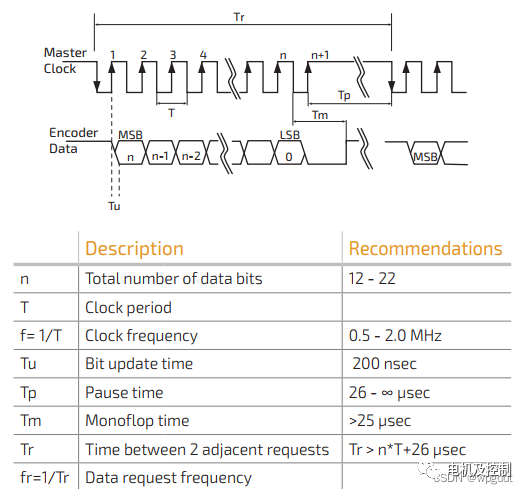
光學(xué)式絕對(duì)型編碼器中也有一個(gè)會(huì)和主軸同步旋轉(zhuǎn)的圓編碼盤(pán),盤(pán)中有分為許多同心圓狀的透明及不透明的區(qū)域,盤(pán)的兩側(cè)分別有光源及光傳感器數(shù)組,光源穿過(guò)編碼盤(pán)后,被光傳感器采集,采集的信息直接代表了轉(zhuǎn)軸的位置;
2023-07-09 16:07:102441 
增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?增量式編碼器通過(guò)對(duì)變化量進(jìn)行計(jì)數(shù)來(lái)測(cè)量位置變化,而絕對(duì)值編碼器可提供實(shí)際位置值。因此,增量式編碼器對(duì)于測(cè)量無(wú)限循環(huán)的運(yùn)動(dòng)比較有用,因?yàn)樗鼈兛梢允褂糜?jì)數(shù)器來(lái)跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對(duì)值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動(dòng)。
2023-07-05 13:34:282245 
伺服電機(jī)編碼器 伺服電機(jī)編碼器是安裝在伺服電機(jī)上用來(lái)測(cè)量磁極位置和伺服電機(jī)轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來(lái)分,伺服電機(jī)編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01899 電子發(fā)燒友網(wǎng)站提供《帶有旋轉(zhuǎn)編碼器和五個(gè)獨(dú)立按鍵開(kāi)關(guān)的宏鍵盤(pán).zip》資料免費(fèi)下載
2023-06-15 10:49:10 0
0 光電編碼器是什么?光電編碼器原理應(yīng)用與優(yōu)缺點(diǎn):光電編碼器是一種常用的位置傳感器,其特性主要包括高精度、高分辨率、穩(wěn)定性好等。光電編碼器通過(guò)使用一系列的光柵刻痕和光電傳感器,可以測(cè)量旋轉(zhuǎn)物體或者單一
2023-06-14 09:13:052051 
TigerISP是全志提供的量產(chǎn)工具,在連接TigerISP時(shí)需要填寫(xiě)Sensor名稱、Sensor分辨率、Sensor幀率及選擇ISP通道、Vich、Wdr模式等......
準(zhǔn)備工作:打開(kāi)
2023-06-13 17:26:12
旋轉(zhuǎn)編碼器是一種常見(jiàn)的傳感器,它能夠通過(guò)檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-06-09 10:16:351606 
在選擇伺服電機(jī)編碼器時(shí),需要考慮多個(gè)因素,例如精度、分辨率、速度、穩(wěn)定性、可靠性等。以下是一些常見(jiàn)的伺服電機(jī)編碼器類型及其特點(diǎn): (1)光電編碼器:光電編碼器具有高精度、高分辨率、高速度等特點(diǎn)
2023-06-09 08:20:02775 我正在使用 S32K344s ADC。網(wǎng)站上的數(shù)據(jù)表和規(guī)范聲明了 12 位分辨率,但 ADC 外設(shè)可以在 CALBISTREG 寄存器中設(shè)置為 14 位分辨率。
如果 ADC 指定為 12 位,14 位分辨率和 12 位分辨率之間有什么區(qū)別?
2023-06-06 09:10:56
旋轉(zhuǎn)編碼器是什么?淺讀旋轉(zhuǎn)編碼器工作原理與特點(diǎn)及應(yīng)用:旋轉(zhuǎn)編碼器是一種常見(jiàn)的傳感器,它能夠通過(guò)檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-05-29 09:21:152027 
我正在使用帶有最新 Kirkstone yocto bsp 版本的 imx8mp,我的圖像傳感器支持 4056x3040 分辨率。
運(yùn)行 gstreamer 時(shí),我觀察到任何高于 4K
2023-05-29 06:00:30
編碼器種類及型號(hào):最常見(jiàn)的編碼器類型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測(cè)量機(jī)器人的關(guān)節(jié)位置,以及測(cè)量車(chē)輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測(cè)量運(yùn)動(dòng)平臺(tái)的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對(duì)式和增量式編碼器。絕對(duì)式編碼器可以直接讀取位置信息,而增量式編碼器則需要計(jì)算位置信息。
2023-05-18 11:15:003455 
編碼器選型看哪些參數(shù)?您必需掌握的5大要領(lǐng);編碼器是機(jī)械設(shè)備中不可或缺的部分,能夠?qū)?b class="flag-6" style="color: red">旋轉(zhuǎn)、線性或角度運(yùn)動(dòng)轉(zhuǎn)換成數(shù)字信號(hào),方便機(jī)器人或工業(yè)設(shè)備的控制和監(jiān)測(cè)。然而,我們?cè)?b class="flag-6" style="color: red">選擇編碼器時(shí)需要考慮許多參數(shù)
2023-05-18 11:10:521927 編碼器是什么?編碼器有哪些分類及應(yīng)用;編碼器是什么?在數(shù)字信號(hào)處理和通信系統(tǒng)中,編碼器是一種重要的設(shè)備,用于將原始數(shù)據(jù)轉(zhuǎn)換為字符序列或二進(jìn)制碼序列。編碼器是一種可以同時(shí)測(cè)量物體位置和方向的蒿精度
2023-05-18 11:08:473133 
最近,手上拿到一個(gè)360度旋轉(zhuǎn)編碼器模塊—KY-040 FOR模塊,因此就想用它寫(xiě)一個(gè)應(yīng)用教程。本章教程主要用到GPIO和EXTI(外部中斷/事件控制器)。 1、旋轉(zhuǎn)編碼器簡(jiǎn)介KY-040旋轉(zhuǎn)編碼器
2023-05-15 16:31:41
增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見(jiàn)的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331340 
我是 NodeMCU 硬件的新手,我想知道是否可以使用旋轉(zhuǎn)編碼器進(jìn)行這種菜單滾動(dòng)v=3OGU- fXRD1E I沒(méi)有找到任何示例,只有沒(méi)有交互的純顯示。
2023-05-04 06:00:50
增量型編碼器旋轉(zhuǎn)一圈提供一個(gè)固定數(shù)量的脈沖,速度是通過(guò)單位時(shí)間內(nèi)測(cè)量的脈沖數(shù)計(jì)算。為了測(cè)量角度和位置,通常是從一個(gè)起始的參考點(diǎn)開(kāi)始計(jì)數(shù)。
2023-04-27 10:20:501797 泛的絕對(duì)值編碼器。合成二進(jìn)制編碼器的優(yōu)點(diǎn)為:阻值范圍寬,分辨率高,能制成各種類型的絕對(duì)值編碼器,壽命長(zhǎng),價(jià)格低,型號(hào)多。缺點(diǎn)為:功率不太高,耐高溫性,耐濕性差,阻值低的絕對(duì)值編碼器不容易制作。
二
2023-04-26 09:21:09
單圈絕對(duì)值編碼器 PVS78E Mining 旋轉(zhuǎn)編碼是用于檢測(cè)旋轉(zhuǎn)角度及其衍生機(jī)械參數(shù)的一類傳感器,包括速度和加速度等,可檢測(cè)旋轉(zhuǎn)、直線等傳動(dòng)運(yùn)動(dòng)。由于應(yīng)用廣泛,現(xiàn)代旋轉(zhuǎn)編碼器可見(jiàn)于諸多機(jī)械
2023-04-25 14:16:582245 ,在編碼器的每一個(gè)位置,通過(guò)讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進(jìn)制編碼(格雷碼),這就稱為n位絕對(duì)編碼器,這樣的編碼器是由光電碼盤(pán)進(jìn)行記憶的。絕對(duì)編碼器在一個(gè)特定的旋轉(zhuǎn)
2023-04-20 16:19:54
的優(yōu)點(diǎn)為:阻值范圍寬,分辨率高,能制成各種類型的絕對(duì)值編碼器,壽命長(zhǎng),價(jià)格低,型號(hào)多。缺點(diǎn)為:功率不太高,耐高溫性,耐濕性差,阻值低的絕對(duì)值編碼器不容易制作。 二、有機(jī)實(shí)芯絕對(duì)值編碼器 有機(jī)實(shí)芯絕對(duì)值編碼器是一種新
2023-04-20 14:21:381598 的優(yōu)點(diǎn)為:阻值范圍寬,分辨率高,能制成各種類型的絕對(duì)值編碼器,壽命長(zhǎng),價(jià)格低,型號(hào)多。缺點(diǎn)為:功率不太高,耐高溫性,耐濕性差,阻值低的絕對(duì)值編碼器不容易制作。 二、有機(jī)實(shí)芯絕對(duì)值編碼器 有機(jī)實(shí)芯
2023-04-20 14:04:39
哪里呢?為什么大家更青睞于絕對(duì)值編碼器呢?簡(jiǎn)單來(lái)說(shuō)說(shuō)。 相比較而言,增量式編碼器分辨率更高,絕對(duì)值編碼器定位更精準(zhǔn)。此外,絕對(duì)值編碼器具有記憶功能,斷電也不失去定位,增量式編碼器則會(huì)失去。什么意思呢?舉個(gè)例子說(shuō)
2023-04-12 09:05:025850 SF120系列拉線編碼器產(chǎn)品介紹: SF120系列拉線位移傳感器分為數(shù)字輸出型拉線編碼器和模擬輸出型拉線編碼器兩個(gè)產(chǎn)品類。 數(shù)字輸出型拉線編碼器可以選擇增量旋轉(zhuǎn)編碼器、絕對(duì)值編碼器等,SF120系列
2023-04-03 14:54:46963 參數(shù) 2.1 分辨率 指編碼器能夠分辨的最小單位。 對(duì)于增量式編碼器,其分辨率表示為編碼器轉(zhuǎn)軸旋轉(zhuǎn)一圈所產(chǎn)生的脈沖數(shù),即脈沖數(shù)/轉(zhuǎn)(Pulse Per Revolution 或PPR)。 碼
2023-03-30 14:57:12
我正在 S32k342 特定控制器中配置 STM 定時(shí)器模塊,因?yàn)槲倚枰渲萌N不同的定時(shí)器分辨率,一種是默認(rèn)定時(shí)器分辨率,使用 48 Mhz FIRC 時(shí)鐘,每滴答 20 ns,我還需要配置分辨率
2023-03-30 07:30:10
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論