本篇文章我們主要介紹正運(yùn)動(dòng)技術(shù)動(dòng)態(tài)鏈接庫環(huán)境配置以及EtherCAT運(yùn)動(dòng)控制器在ROS下的單軸運(yùn)動(dòng)。
2024-03-17 11:11:13 377
377 
本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-17 11:06:06452 
本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-06 11:47:51627 
自己給樹莓派做的一個(gè)HDMI轉(zhuǎn)HDMI mini的轉(zhuǎn)接頭,結(jié)果顯示顏色錯(cuò)亂,正常應(yīng)該是藍(lán)色的背景,但顯示是粉紅色,畫面還有些抖動(dòng):
不知問題是線序接錯(cuò)了?還是干擾的問題?還是信號線布線時(shí)沒有做差分布線的問題?(上次做的另一個(gè)hdmi轉(zhuǎn)hdmi的也沒做差分,也沒問題啊)
下面是接線的線序:
2024-01-25 20:10:06
/步進(jìn)伺服驅(qū)動(dòng)器;(2)聯(lián)動(dòng)軸數(shù)最高可達(dá)16軸,運(yùn)動(dòng)周期最小為100μs;(3)標(biāo)配8進(jìn)8出,其中4路高速鎖存輸入和8路高速PWM、PSO輸出,更多IO請選配ACC37接線板擴(kuò)展板;(4)支持PWM
2024-01-24 09:48:21
機(jī)器人運(yùn)動(dòng)學(xué)中的運(yùn)動(dòng)學(xué)約束是指機(jī)器人在運(yùn)動(dòng)過程中受到的限制,包括位置、姿態(tài)、速度和加速度等因素。這些約束會對機(jī)器人的自由度產(chǎn)生影響,從而影響機(jī)器人的運(yùn)動(dòng)和控制。運(yùn)動(dòng)學(xué)約束通常用數(shù)學(xué)模型來描述,為機(jī)器人的運(yùn)動(dòng)控制提供了理論基礎(chǔ)。
2024-01-18 16:45:24332 
問題是:1 輸出100%扭矩但是電機(jī)不轉(zhuǎn)怎么不報(bào)過流?
2 控制器輸出端電壓用750檔數(shù)字表過量程,請問控制器輸出電壓是多少?
3 此問題該怎么入手檢查?是否機(jī)械問題的可能性更大?
2024-01-10 06:39:34
時(shí)間、距離、速度、心率等的綜合對比分析,還可以幫助教練更精確地了解每個(gè)運(yùn)動(dòng)員的訓(xùn)練狀態(tài)和表現(xiàn)水平,制定個(gè)性化的訓(xùn)練計(jì)劃和比賽策略,提高運(yùn)動(dòng)員的訓(xùn)練效果和比賽成績。并且,這些數(shù)據(jù)還可以共享給運(yùn)動(dòng)員或相關(guān)
2023-12-29 11:54:39
在測試ADXL362過程中,把運(yùn)動(dòng)中斷映射到INT2引腳,把靜止中斷映射到INT1中斷,可以穩(wěn)定觸發(fā),但是,當(dāng)關(guān)閉靜止中斷的使能時(shí),運(yùn)動(dòng)中斷不能每次觸發(fā),并且需要很長時(shí)間的等待才能進(jìn)行第二次觸發(fā)。而且INT1引腳配置為運(yùn)動(dòng)中斷時(shí)不能相應(yīng)中斷。
2023-12-29 06:19:52
現(xiàn)在用AD9852DDS做一個(gè)頻率轉(zhuǎn)換,系統(tǒng)頻率為100MHz,使DDS從7.幾轉(zhuǎn)換到6.幾MHz,發(fā)現(xiàn)頻率轉(zhuǎn)換的時(shí)間不固定。
為了測試方便,假定頻率從0Hz變?yōu)?MHz,可以明顯看到5MHz的信號
2023-12-25 06:03:42
請教一個(gè)關(guān)于AD5560芯片的問題,AD5560芯片的datasheet與電路筆記給出的參考設(shè)計(jì)都是針對一個(gè)DUT,但是目前我的項(xiàng)目中需要多路電源,也就是有多個(gè)DUT,而且電流要求都在100mA以上
2023-12-20 06:09:40
項(xiàng)目需要給6個(gè)AD9643提供200M時(shí)鐘,同時(shí)給另外6個(gè)ADC提供100M時(shí)鐘,時(shí)鐘源是100M外部輸入,要求12個(gè)ADC同步,請問AD9523-1能否實(shí)現(xiàn)6路200M、6路100M這樣的輸出?
2023-12-14 07:12:30
工作效率大大提 高。1000個(gè)分布式I/O數(shù)據(jù)的刷新周期僅為30μs,其中包括端子循環(huán)時(shí)間。與100個(gè)伺服軸的通訊只需100μs。在此期間,可以向所有軸提供設(shè)置值和控制數(shù)據(jù),并報(bào)告它們的實(shí)際位置和狀態(tài)
2023-12-13 11:37:40
Oracle操作系統(tǒng)用戶不改密碼的理由可以從多個(gè)角度進(jìn)行解釋和分析。 首先,不改密碼可能是因?yàn)橛脩粲X得當(dāng)前的密碼已經(jīng)足夠安全。在選擇密碼時(shí),用戶可能會遵循一些安全原則,如長度足夠長、包含特殊字符和數(shù)
2023-12-06 10:20:06162 不知道大家有沒有發(fā)現(xiàn),會編寫shell腳本的運(yùn)維,工資不會低,并且他的工作會很輕松!今天浩道跟大家分享每一個(gè)Linux運(yùn)維應(yīng)知必會的100個(gè)shell腳本,雖然你工作中可能用不上,但是卻不能不懂!懂了,你就可以很吃香了,大家可以收藏起來,每天在自己辦公電腦上敲一敲,提升自己的shell編程能力,一起看看!
2023-12-05 09:28:30419 運(yùn)動(dòng)藍(lán)牙耳機(jī)相比傳統(tǒng)有線耳機(jī),具有以下幾個(gè)優(yōu)勢: 無線自由:運(yùn)動(dòng)藍(lán)牙耳機(jī)采用無線連接技術(shù),擺脫了有線束縛,使你在運(yùn)動(dòng)時(shí)更加自由舒適。不再擔(dān)心線纜扯到或限制你的動(dòng)作。 輕便便攜:運(yùn)動(dòng)藍(lán)牙耳機(jī)通常小巧
2023-12-04 15:45:19294 初始化的。
結(jié)果存儲在motion_indicator字段中。在這個(gè)字段里,數(shù)組motion給出了每個(gè)區(qū)域的運(yùn)動(dòng)強(qiáng)度值。高值表示幀之間的高運(yùn)動(dòng)變化。典型的運(yùn)動(dòng)會給出一個(gè)在100到500之間的值。這種敏感性取決于集成時(shí)間、目標(biāo)距離和目標(biāo)反射率。
對于低功耗應(yīng)用,理想的組合是使用運(yùn)動(dòng)指示器
2023-12-01 16:31:29278 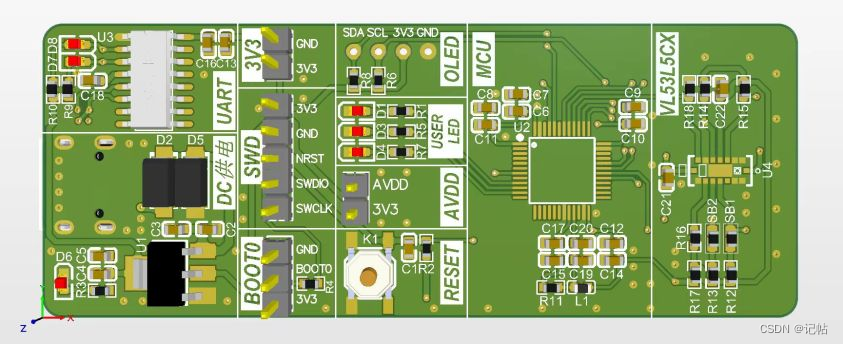
運(yùn)動(dòng)藍(lán)牙耳機(jī)適合跑步戴嗎?幾款適合跑步運(yùn)動(dòng)藍(lán)牙耳機(jī)品牌推薦 運(yùn)動(dòng)藍(lán)牙耳機(jī)可以提供便捷、無線的音樂體驗(yàn),適合運(yùn)動(dòng)時(shí)使用。一款好的運(yùn)動(dòng)藍(lán)牙耳機(jī),不僅能讓和運(yùn)動(dòng)時(shí)間延長,而且還感覺不到累。你心目中
2023-11-27 17:35:56367 
Mode模式下,100增益則無問題。
還有就是請問如何產(chǎn)生一個(gè)精密的負(fù)電壓 -5V 給AD8253供電啊?我之前用的是電荷泵將正電壓轉(zhuǎn)為負(fù)電壓后給AD8253供電,但這種負(fù)電壓紋波太大,有20mv
2023-11-27 07:45:43
100M的電阻時(shí),會降低輸入阻抗,這個(gè)無法接受。不接這個(gè)100M電阻的時(shí)候,由于沒有給正向輸入端提供偏置電流,輸出值會鎖在一個(gè)較大的電壓值上,這個(gè)輸出也無法接受。有沒有一種辦法,可以使不接測試器件時(shí),使
2023-11-27 06:45:50
請問我要測xy軸方向的運(yùn)動(dòng)用什么傳感器 只測一個(gè)平面
2023-11-10 06:09:27
多任務(wù)的場合程序只能順序執(zhí)行,使得程序的執(zhí)行效率十分低下。
ZMC運(yùn)動(dòng)控制器支持多任務(wù)編程,每個(gè)任務(wù)都有自己唯一的編號,此編號沒有優(yōu)先級意義,只是標(biāo)識當(dāng)前程序?qū)儆谀囊?b class="flag-6" style="color: red">個(gè)任務(wù)。不同型號支持的任務(wù)數(shù)有所不同
2023-11-07 09:52:36
用4個(gè)5號電池給單片機(jī)最小系統(tǒng)板供電(AT89C52),但是兩個(gè)電機(jī)里邊響都不響,將模塊接入單片機(jī)開發(fā)板,發(fā)現(xiàn)電機(jī)里邊噠噠響,還是不轉(zhuǎn)(用手助力下仍然不轉(zhuǎn)動(dòng)),如果只接一個(gè)電機(jī),用手助力一下就可以轉(zhuǎn)動(dòng),想問下有沒有辦法提供足夠的驅(qū)動(dòng)能力給電機(jī)?謝謝大家了。
2023-10-26 07:37:48
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會綜合信號分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52813 
為什么遙控傳輸?shù)臄?shù)值不直接就是電機(jī)輸出的值,而是除以一個(gè)數(shù),將數(shù)值變小。
2023-10-23 06:23:10
全國產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-10-22 10:51:57459 
全國產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-10-16 09:49:53421 
塑料組合蓋不溶性微粒測定儀用于檢測輸液器具、一次性血路產(chǎn)品、藥包材等產(chǎn)品不溶性微粒含量及大小的測定,符合GB8368-1998/2005/2018、YYT1556-2017標(biāo)準(zhǔn)、包裝材料
2023-10-13 13:32:48
通常用什么辦法來評估一個(gè)運(yùn)動(dòng)控制系統(tǒng)的動(dòng)態(tài)響應(yīng)速度
2023-10-13 07:12:55
怎么通過陀螺儀獲取當(dāng)前的運(yùn)動(dòng)距離
2023-10-12 06:44:12
怎么用單片機(jī)獲取一個(gè)物體運(yùn)動(dòng)的初始速度
2023-10-11 07:23:00
點(diǎn)位運(yùn)動(dòng)控制:即僅對終點(diǎn)位置有要求,與運(yùn)動(dòng)的中間過程即運(yùn)動(dòng)軌跡無關(guān)。相應(yīng)的運(yùn)動(dòng)控制器要求具有快速的定位速度,在運(yùn)動(dòng)的加速段和減速段,采用不同的加減速控制策略。
2023-10-09 17:10:10555 為什么步進(jìn)電機(jī)改變運(yùn)動(dòng)方向就容易出現(xiàn)丟步的情況
2023-10-09 08:17:25
全國產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器的軸參數(shù)設(shè)置與單軸運(yùn)動(dòng)例程講解。
2023-09-27 15:42:26353 
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如何編寫運(yùn)動(dòng)控制卡的功能函數(shù)庫。
2023-09-26 08:14:08
在這段視頻中,我們通過使用一個(gè)FPGA構(gòu)建自己的GameBoy虛擬卡帶,來破解GameBoy的卡帶保護(hù)機(jī)制!
2023-09-26 07:13:16
給初學(xué)單片機(jī)的40個(gè)實(shí)驗(yàn)
2023-09-25 08:12:56
貼裝頭的運(yùn)動(dòng)是通過齒輪帶動(dòng)圍繞處于中間的塔進(jìn)行的。塔身上有橢圓型凹槽,當(dāng)齒輪帶動(dòng)吸嘴運(yùn)動(dòng)時(shí),貼裝頭在凹槽上下運(yùn)動(dòng),使貼裝頭在拾取和貼裝的時(shí)候處于位置,如圖2所示虛線為凹槽。
2023-09-22 15:29:10256 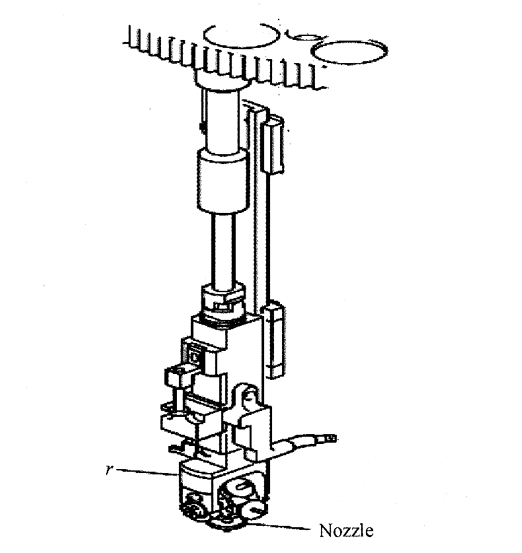
分享功放電路設(shè)計(jì)的相關(guān)設(shè)計(jì)資料,資料內(nèi)容豐富,里面有100個(gè)功放電路的設(shè)計(jì)圖集,適合電路初學(xué)者和想提高電路設(shè)計(jì)技能的工程師們參考學(xué)習(xí)
2023-09-20 06:07:58
自主設(shè)計(jì) 了一種雙核四軸運(yùn)動(dòng)控制器 。該 運(yùn)動(dòng)控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
工博會在即,正運(yùn)動(dòng)展品提前劇透!
2023-09-14 16:56:10330 
150 μA,在低功耗模式下功耗不超過 80 μA。由于加速度計(jì)具有超低噪聲性能,始終具有低功耗特性,并結(jié)合了高傳感精度,因此能夠?yàn)榭蛻籼峁┳罴?b class="flag-6" style="color: red">運(yùn)動(dòng)體驗(yàn)。此外,加速度計(jì)具有智能的休眠到喚醒(活動(dòng))和返回
2023-09-06 06:10:18
應(yīng)用:本樣本代碼使用Nano130控制傳感器MPU9250。
BSP 版本: Nano100B系列 BSP CMSIS v3.03.000
硬件: NuEdu-EVB-Nano130
這個(gè)例子說明
2023-08-31 09:29:16
電子發(fā)燒友網(wǎng)站提供《你必須自動(dòng)化SAN環(huán)境的5大理由.pdf》資料免費(fèi)下載
2023-08-29 15:12:32 0
0 開始使用Power Stage Designer的13個(gè)理由
2023-08-24 13:37:06245 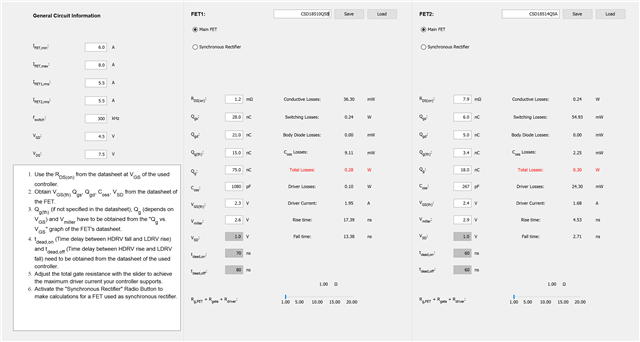
拿到公司給的開發(fā),Nutiny-EVB-Nano130,用官方例程nano100B的程序,下載進(jìn)去程序不運(yùn)行,keil在線調(diào)試正常運(yùn)行,有沒有遇到這種情況
2023-08-21 08:00:03
現(xiàn)在PLC的運(yùn)動(dòng)控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的PLC的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢又在哪里?PLC及運(yùn)動(dòng)控制器發(fā)展到今天,它們
2023-08-08 08:09:46820 英偉達(dá)a100和h100哪個(gè)強(qiáng)? 英偉達(dá)A100比H100更強(qiáng)。英偉達(dá)A100在處理大型模型和數(shù)據(jù)集時(shí)可能比V100表現(xiàn)更優(yōu)秀。 H100 是一款針對大模型專門優(yōu)化過的芯片,使用臺積電 5nm 定制
2023-08-07 17:32:5910395 “現(xiàn)在 PLC 的運(yùn)動(dòng)控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的 PLC 的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢又在哪里?”
2023-08-06 09:30:011203 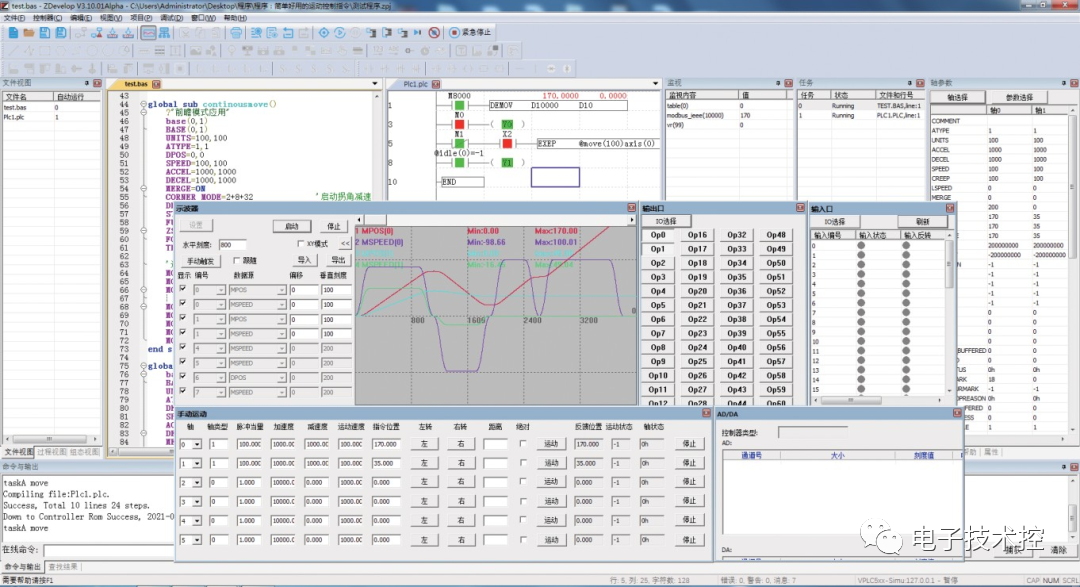
的發(fā)展,工業(yè)機(jī)器人應(yīng)用越來越廣泛,PLC也不再是簡單的可編程邏輯控制器,各個(gè)品牌廠家都推出了自己的運(yùn)動(dòng)控制型PLC,來實(shí)現(xiàn)一些運(yùn)動(dòng)控制功能,與此同時(shí),運(yùn)動(dòng)控制卡及運(yùn)
2023-08-04 08:09:121072 重力下流過一個(gè)標(biāo)定好的玻璃毛細(xì)管粘度計(jì)的時(shí)間,粘度計(jì)的毛細(xì)管常數(shù)與流動(dòng)時(shí)間的乘積,即為該溫度下測定液體的運(yùn)動(dòng)粘度(該溫度下運(yùn)動(dòng)粘度與同溫度下液體的密度之積為該溫度
2023-07-31 10:53:29
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542150 
,同時(shí)縮小工控機(jī)體積;
5、ECI運(yùn)動(dòng)控制卡內(nèi)部可寫部分代碼,實(shí)時(shí)性要求特別高的場合也適用;
6、對于環(huán)境不好的場合,時(shí)間長了工控機(jī)容易進(jìn)灰塵,ECI運(yùn)動(dòng)控制卡可靠穩(wěn)定不受影響。
2023-06-13 09:44:20
拿到公司給的開發(fā),Nutiny-EVB-Nano130,用官方例程nano100B的程序,下載進(jìn)去程序不運(yùn)行,keil在線調(diào)試正常運(yùn)行,有沒有遇到這種情況
2023-06-13 06:52:11
PCA116-100位移傳感器又稱線性傳感器,是屬于金屬感應(yīng)的線性器件。 PCA116-100傳感器的作用是將各種被測物理量轉(zhuǎn)化為電能。 位移是與運(yùn)動(dòng)過程中運(yùn)動(dòng)的物體的位置有關(guān)的量。
2023-06-02 14:48:53379 
正運(yùn)動(dòng)MOVESYNC指令實(shí)現(xiàn)多軸同步跟隨功能。
2023-05-31 09:52:17661 
、12F 和 12S 板的硬件測試夾具。測試夾具有一個(gè) RESET & FLASH 按鈕。編程是使用 Thonny IDE 完成的,它是 microPython 特有的。
如果目標(biāo)
2023-05-25 07:57:12
運(yùn)動(dòng)傳感器或運(yùn)動(dòng)檢測器是一種使用傳感器檢測附近人或物體的電子設(shè)備。與許多其他類型的傳感器不同,運(yùn)動(dòng)傳感器通常是由三個(gè)主要組件組成的嵌入式系統(tǒng):傳感器單元、嵌入式計(jì)算機(jī)和硬件(或由機(jī)械組件組成
2023-05-23 15:47:471271 我自己打板子搞了個(gè)ATMEGA48的小板子。好多年了。
現(xiàn)在有一個(gè)出問題。
先貼出原理圖:
我寫了一個(gè)閃燈的程序,其中一塊板子燈可以閃,另外一塊不閃,一直亮。
是不是那個(gè)管腳壞了?請大神幫我分析一下。謝謝!
2023-05-23 09:30:07
XPLC108E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款集成了 Basic、PLC 梯形圖和 HMI 組態(tài)三種編程方式于一體的運(yùn)動(dòng)控制產(chǎn)品。?XPLC108E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT
2023-05-12 15:36:270 ,XPLC系列運(yùn)動(dòng)控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場合。
XPLC006E自帶6個(gè)電機(jī)軸,最多12軸運(yùn)動(dòng)控制(含虛擬軸數(shù)),支持12軸直線插補(bǔ)、電子凸輪、電子齒輪、同步跟隨、虛擬軸設(shè)置等功能
2023-05-11 09:49:04
EC4410 系列經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡是一款脈沖型,模塊化的網(wǎng)絡(luò)型運(yùn)動(dòng)控制卡。控制卡本身最多支持6 軸、可擴(kuò)展至 12 軸的運(yùn)動(dòng)控制、用以實(shí)現(xiàn)直線插補(bǔ)、任意圓弧插補(bǔ)、空間圓弧、螺旋插補(bǔ)、電子凸輪
2023-04-28 09:56:510 全球客戶2000+ 中國區(qū)客戶100+ 被Sheltered Harbor認(rèn)可的 首個(gè)數(shù)據(jù)保險(xiǎn)庫解決方案 戴爾PowerProtect Cyber Recovery數(shù)據(jù)避風(fēng)港 守護(hù)企業(yè)數(shù)據(jù)安全 最后
2023-04-25 16:13:09961 
運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會綜合信號分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141207 最近在學(xué)習(xí)西門子PLC的高速計(jì)數(shù)器指令和運(yùn)動(dòng)控制部分,是用運(yùn)動(dòng)控制軸輸出
頻率為10kHz,AB相正交信號的一萬個(gè)脈沖信號 來讓高速計(jì)數(shù)器接收,想記錄一
下自己的學(xué)習(xí)過程。
2023-04-20 11:30:502 設(shè)計(jì)類型:運(yùn)動(dòng)DV主板、數(shù)字電路類型單板 Pin數(shù):7644 層數(shù):8層 機(jī)殼地與數(shù)字地距離過近(銅箔與銅箔之間距離過近) 其實(shí),這一塊布局可以整體往下移的,讓機(jī)殼地壓縮在某一個(gè)矩形區(qū)域
2023-04-19 15:05:29
本次介紹一款XYZ三維運(yùn)動(dòng)、電容傳感器閉環(huán)的壓電納米定位臺及相應(yīng)控制器,該電容運(yùn)動(dòng)臺的型號為P12.XYZ100C,控制器型號為E00.D11AL。 P12.XYZ100C壓電納米定位
2023-04-08 08:53:381024 
哪個(gè)中斷處理程序可用于處理由于應(yīng)用程序訪問無效內(nèi)存位置而導(dǎo)致的故障?如果可能,請?zhí)峁?IRQ 號。
2023-04-07 09:11:14
于別人只是和友商互卷。他表示,“我們是自己卷自己!” 凌鷗創(chuàng)芯CEO李鵬 ? 在電控MCU方面持續(xù)迭代 公開資料顯示凌鷗創(chuàng)芯是一家專注于運(yùn)動(dòng)控制領(lǐng)域集成電路及總體解決方案設(shè)計(jì)的國家高新技術(shù)企業(yè),具有處理器、DSP、AD/DA、PGA等數(shù)模混合SoC研
2023-04-06 01:54:003117 
沖突的方法 框架結(jié)構(gòu) 溝通程序 錯(cuò)誤檢測等, 3個(gè)理由了解為什么CAN總線更好 CAN總線的顯著優(yōu)勢在于它高度靈活并提供許多獨(dú)特的功能,從而導(dǎo)致其他行業(yè)的采用率大幅增加。 CAN總線是一種
2023-04-03 14:32:15
C#對雷賽運(yùn)動(dòng)控制卡的應(yīng)用案例1:定長運(yùn)動(dòng)2:連續(xù)運(yùn)動(dòng)3:插補(bǔ)運(yùn)動(dòng)4:PVT運(yùn)動(dòng)5:手輪運(yùn)動(dòng)6:回原點(diǎn)運(yùn)動(dòng)7:IO8:AD-DA9:高速位置比較+鎖存
2023-03-31 15:13:020
 電子發(fā)燒友App
電子發(fā)燒友App




















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論