 電子發燒友App
電子發燒友App


在無人駕駛車領域,技術的每一步發展都必須以保障個人安全為丈量,由是它的發展除了將帶給人們歡喜鼓舞的便利之外,也引發了對其安全性的擔憂。本文作者Michael Dempsey在“How to drive 10 billion miles in an autonomous vehicle”一文中分享了另一種解決思路,即利用模擬技術預演可能遇到的行車場景,并認為該邏輯能夠進一步加深人們對于相關領域的認知。
谷歌、特拉斯、Zoox……還有更多公司借助模擬的方法力圖使無人駕駛車的行駛里程盡快達到十億英里。目前,無人駕駛車的發展存在兩個瓶頸:一是官方對于車輛最低里程數的要求。二是實驗和測試模型仍待優化。
工程師基于大數據完善無人車輛的行使模型,實驗場景從太陽光到傳感器,再從不同角度的傳感器到汽車前方的飛行障礙以及異常的外界行為等。
而問題在于在重現現實場景并不容易,也不安全。
蘭德的一份報告發現,如果要測試無人駕駛的安全性是否達到可以接受的程度,實則需要上萬英里甚至數十億英里的實驗里程作證明。
“即使作最合理的打算,現有的無人駕駛車也需要幾十年甚至數百年的時間才能完成預定的里程測試。而如果將測試放在現實道路上,則會是一個不可能完成的任務。”
用什么方法才能不斷提高無人駕駛車輛的可靠性?
像Uber、Lyft和Zoox這樣的公司誕生于大城市,并在一定條件下進行運作以降低自身的技術壁壘。但是這可能適用于世界各地的Uber們,而像傳統的原始設備制造商則選擇通過不斷更新汽車的自動化功能來彌合與共享技術的差距。
因此,我們可以繞過在目前需要大量數據的傳統技術方法,而建構起能夠進行推理和學習小量數據的模型。公司在去年被Uber收購的加里·馬庫斯花了幾年時間研究這個問題,但此類學習模型至今還沒有在無人機中成為現實。
不要忘了仿真模擬
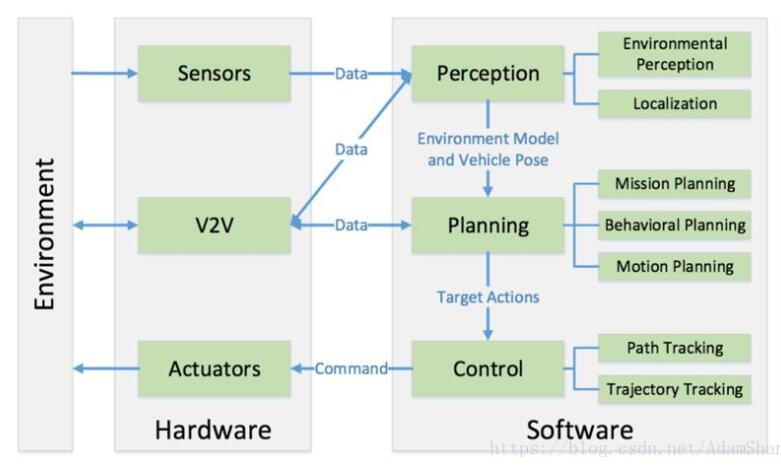
從軟件到硬件的仿真模擬被合理建模時,就會為公司實驗和測試他們的汽車模式提供可能性。
這包括各種各樣的應用場景,包括交通、司機行為、天氣以及道路環境等。
還要考慮傳感器的使用情形。需要多少個相機和雷達?它們應該被放置在哪里?應該使用哪種模型硬件?
同時,靈活的隨機排列也十分重要。基于此,在路上就不需要把車隊和可靠的司機緊緊綁在一起。
我們仍未抵達終點
如今,諸如Vires、TaSS PreScan、CarSim、Oktal ScanNer和ROS Gazebo等產品給工程師模擬傳感器及其發生機制和機械結構提供了可能。 盡管它們各有所長,但卻同時忽視了對于模擬而言至關重要的領域,這包括過分簡化現有的傳感器輸出,以及對環境如何影響自主模型的復雜程度的了解。
然而隨著技術的不斷發展,我們必須考慮如何以高保真的方式執行、插入和測試硬件與軟件的融合之物。
高保真的模擬環境
雖然模擬大多數傳感器對于外界的感知存在困難,但是簡單的模擬在車輛上的應用越來越普遍。
由于低成本的LiDARs未實現的承諾和高端單元的短缺使得OEMs和Tier 1的可伸縮性變得困難,因此光學相機被報以期待。
模擬相機的模擬數據與輸入的數據沒有誤差,因此為了正確地測試對外界感知程度,工程師需要建構出逼真的模擬環境。但是建造一個復雜的模擬光圈則非常昂貴且存在困難,因此沒有人能夠為了打造一輛無人汽車而模擬這個環境。
大約在一年前,我遇到了克雷格。當時他正在發布一個他稱之為DeepDrive的東西。我后來得知,作為早期的工程師之一,他利用游戲兜售1.37億美元的開發成本重現現實世界的場景,并通過展示高保真度的景象...來支持無人駕駛汽車。
幾個月后,克雷格加入了一家名為Uber的小型初創公司,專注于研究模擬。
普林斯頓大學的一個研究小組詳細介紹了使用GTA V的優勢。它將世界范圍劃分為100平方英里、400萬人、262種車輛、1167種不同的生物、14種天氣條件、以及在城市、農村和林地環境中的7萬多條動態路段。
模擬行使里程真的有用嗎?
對于模擬里程效用的觀點不一
支持一方認為,模擬可以用來模擬罕見情況和基線數據,罕見的情況是指難以重現或足夠隨機的場景。如果無人駕駛能夠提供99%的可靠性,因為大部分場景已經通過模擬得以優化。而AI 或ML的一些未來技術迭代則允許我們在沒有事先數據預備的情況下,對極端情況做出反應。
排除特殊情況之外,仿真對于構建基礎數據集也非常有用,并且在此基礎上不斷進行進一步的測試。
反對一方則認為與此相對應的是:模擬環境不夠好以至于不能高效地生成模型。通常,這是一個環境與車輛交互的場景,并且很難在現實場景中復現。此外,還存在著圖像保真度過低的情景。
從模擬虛擬到在現實情形下的強化學習
為了幫助解決有關數據質量的一些問題,研究人員正在測試將虛擬圖像輸入轉化為現實模型的可能性,以改進模擬實驗。
谷歌曾放出消息,雖然許多政府機構還不愿意將模擬英里數作為規定中的自主駕駛測試所需里程的一部分,但隨著對模擬的監管變得更加明確,這種情況可能會發生變化。
模擬是必要的
如果精確度足夠高,那么模擬是有價值的。誠然,模擬可能不會解決的最后1%的自主駕駛問題。但如果技術可靠,那么在未來可以讓模型完成更好的場景識別或應對更大范圍的場景。
許多公司對此表示贊同。包括特斯拉,Zoox,Comma.ai,Drive .ai和極光創新公司都在積極招聘模擬工程師。
在無人駕駛領域之外
模擬技術的使用能夠擴展到無人駕駛領域之外。雖然我們可以借此理解無人機如何感知周圍的世界,但除此之外我們也能更好地明白交通、駕駛行為,甚至是行人行為的潛在邏輯。
退一步講,一個模擬環境中存在足夠多的特定模型和動態生命,因此我們也可以更好地理解機器人,它們將與我們的真實世界和數字世界發生交互。
像Improbable這樣的公司已經瞄準了這個潛在市場。投資者們也已經認識到,該技術作為未來模擬世界的建筑師其所隱藏的價值。
我們才剛剛觸及這項技術的表明。許多公司正在大力發展該項技術,一些初創公司也已經開始開發獨立的軟件。隨著研究深入,預計會有各種各樣的新選手進入市場。那些最早成功人有機會成為早期的領導者,或能帶領其他人更好地進行階段式的發展。



























 工商網監
工商網監
評論