軟件平臺,幫助他們結合車輛和硬件系統,快速搭建一套屬于自己的完整的自動駕駛系統。 騰訊推出騰訊車聯“AIinCar”系統,針對交互智能和服務場景智能為車企提供了具體的解決方案,開放了五大基于AI的能力
2018-01-23 16:17:31
AutoX創始人肖健雄來信:無人車量產的4大技術儲備
2020-04-24 12:38:06
。這種實時監測和快速響應的能力,大大提高了空域管理的效率和安全性。
全面覆蓋與高精度數據:無人機全景監測能夠實現對空域的全面覆蓋,不留死角。同時,高清攝像頭和傳感器能夠獲取高精度的影像數據,為管理者
2024-02-20 15:23:56
駕駛汽車也稱作智能汽車,即環境感知、路徑規劃、行為決策、自主控制能力的智能車輛平臺。其關鍵技術主要有兩個方面:車輛定位和車輛控制技術。無人駕駛技術實現手段是在車上安裝攝像頭、雷達傳感器和激光探測器等先進
2014-11-11 11:21:30
攝像頭車載攝像頭的大致原理是:首先,采集圖像進行處理,將圖片轉換為二維數據;然后,進行模式識別,通過圖像匹配進行識別,如識別車輛行駛環境中的車輛、行人、車道線、交通標志等;接下來,依據物體的運動模式或使用雙目定位,以估算目標物體與本車的相對距離和相對速度。`
2017-09-30 16:50:53
路。該程序也允許控制人用鼠標和鍵盤去遙控車。這還遠沒有完成,現在只是讓小車與電腦通過藍牙進行了連接,后面還有很多算法需要去做。包括光線對識別的影響及其它都需要考慮進去。為了大家能更清楚地理解我這個項目
2014-11-04 17:04:38
完全透支目前的路網能力。同時,不合理的出行規劃也是造成擁堵的重要問題。因此車托幫通過移動互聯網的技術方法和模式,致力于改善交通,為每個車主用戶提供最適宜的路線,從而起到緩解交通擁堵的目的。 那么車托
2014-04-25 07:40:51
車用磁阻傳感器式電子羅盤系統的開發羅盤是一種重要的導航工具,已廣泛應用于飛機和航海導航等領域。一般在飛機和航海導航系統中使用的慣性導航系統由于價格昂貴、結構復雜、導航誤差隨時間累計等原因而不適合車載
2009-11-26 16:58:53
車聯網與智能駕駛車聯網和自動駕駛密切相關,很大程度上可以理解為是對自動駕駛高階版本的增強和補充,通過車與車、車與人、車與交通基礎設施、車與網絡的互聯互通,讓對環境已經具備感知能力的自動駕駛汽車,再
2019-03-19 06:20:10
GJ—341 經緯儀載車行駛平順性的測試與分析經緯儀是精密的測量跟蹤儀器。現代軍事技術的發展,要求經緯儀不僅具有可靠的精度、快速跟蹤的能力,還要求經緯儀具有良好的機動性與安全性。所以對經緯儀載車
2009-12-02 12:35:58
保障。
3、測試能力庫
包含系統測試組件、UITestKit組件、專項測試組件,以及分布式測試組件,實現豐富的場景模擬能力和跨設備分布式測試能力。
Hypium測試框架架構
Hypium測試框架以插件
2023-03-03 19:00:43
硬件設計則是為了確保設備在執行這些任務時能夠保持低能耗,從而提高其續航能力。
2、應用場景
NanoEdge AI 可以廣泛應用于各種物聯網設備和傳感器,如智能家居、工業自動化、智能交通、醫療健康
2024-03-12 08:09:00
Uber無人車撞死人原因:軟件發現了受害者但選擇忽略
2019-05-28 09:26:40
,天空灰朦,駕駛員視野不清;三是大風天氣,進入臺風場景,行駛阻力增大,受大風的影響,騎車人偏離本方線路左右搖晃行駛,與機動車發生碰撞; 四是高溫天氣,烈日炎炎,駕駛員容易疲勞瞌睡,還發生了爆胎事故
2018-10-16 13:36:05
的低空無人機反制系統。
知語云智能科技的無人機反制系統,集成了先進的雷達探測、無線電干擾、導航誘騙等多項技術。能夠在復雜的低空環境中,迅速發現、識別、定位并有效管控無人機。同時,該系統還配備了智能決策
2024-01-26 16:10:05
干擾,車輛必須具有優良的電磁兼容性能,同時也必須提供一個具有能夠模擬并復現車輛電磁兼容性環境的測試實驗室,來驗證車輛的電磁兼容性能。二、機動車電磁兼容性測試技術隨著電子技術和信息技術的發展,電磁兼容試驗從最初
2015-12-17 16:36:15
項目名稱:無人車試用計劃:項目名稱:無人車主要完成功能如下:1.自主避障;2.快速行駛,時速>36km;3.大負載行駛,有效載荷≥50kg;4.具備自主的路徑規劃,自行行駛至目的地;5.無線視頻傳輸,傳輸距離≥2km;6.可多車組網運行。現已完成方案設計,機械加工,電氣設計
2020-05-28 17:29:40
巨大的發展潛力,因此把RFID技術應用來針對局部區域的交通智能化而形成“車聯網”具有很高的可行性。目前,對交通擁擠事件自動檢測算法的研究相對較少,仍然處于初始階段,并且利用RFID采集交通參數來判定
2019-07-26 06:31:32
電動汽車充電。然而,僅此一舉還遠遠不足以提高電動汽車的行駛距離。三星公司另辟蹊徑,開發出最新款電動車電池的原型,號稱具有卓越的供電能力,可滿足汽車行駛相當長的一段距離。三星電子集團電池制造業
2016-01-15 16:34:30
為什么僅有GPS無法滿足無人車的定位要求?
2021-11-22 06:55:43
目標的軌跡、進行行為分析。AI+交通:人類對車輛的控制最終會接近零,實現無人駕駛場景駕駛的進化過程正是自動智能化交通的演變蹤跡:現階段,輔助駕駛的各項功能相對比較成熟,無論是測試還是實際開放環境表現都比
2018-12-21 14:23:32
是無人駕駛的基礎,無人駕駛車通過各類傳感器獲取外部信息,并通過車輛內部的物聯卡(www.zjytech.com)傳輸給處理系統,系統對汽車做出正確指示,確保安全行駛。 2.新能源汽車。新能源汽車
2018-02-11 10:13:06
俄羅斯武裝力量將列裝無人地面車輛,早在2000年,俄羅斯國防部決定啟動“2015武裝自動化”計劃,開展綜合研究,設計無人車和無人機。盡管實施了“2015武器自動化”計劃、進行了系列無人車和無人機試驗,國防部還是決定終中止相關工作,放慢無人車的開發進度。
2020-05-14 08:18:06
通過交叉驗證來剪枝。關于過擬合為了得到一致假設而使假設變得過度復雜稱為過擬合。比如,考試的時候,有的人采用題海戰術,把每個題目都背下來。但是題目稍微變化一下,他就不會做了,因為他沒有總結出通用的規則。過擬合的原因一般有兩種:A.模型太過復雜而樣本量不足B.訓練集和測試機特征分布不一致 `
2018-05-23 09:38:48
的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術,實現車與X(人、車、路、后臺等)智能信息的交換共享,具備復雜的環境感知、智能決策、協同控制和執行等功能,可實現安全、舒適、節能、高效行駛,并
2020-06-10 07:00:00
Communication)什么是ETC車路協同?ETC車路協同系統包括三部分組成:云端、路端、車端(用戶)ETC車路協同架構圖,如圖:云端:對路端交通信息進行匯聚和決策,并將決策結果發送給相關路端設備。路端:包括
2023-02-21 15:03:35
該方案基于Atmega128單片機和無線通信技術設計,其創新點是采用了PC控制模式和單兵運行模式兩種方式對無人車進行控制,極大地增強了無人車的功能性和環境適應能力。該方案可廣泛應用于短途貨運客運
2019-06-14 05:00:09
作為一個差分定位基站,對過往車輛高精定位,引導車輛進行合理的行駛。總結起來,一款RSU產品需要滿足以下需求:具備強大的數據處理能力;具備高速數據上行和下發能力;適應復雜的戶外場景要求;具備多種的通訊模組
2023-03-14 11:12:33
系統模塊實現的功能如下:(1)LED顯示模塊能夠對十字路口的復雜交通運行進行指示;(2)數碼管顯示模塊實現倒計時的顯示;(3)LCD顯示模塊使用LCD1602,實現可視化控制;(4)通過按鍵模塊進行
2013-05-06 21:21:27
基于實物期權的供應鏈能力柔性決策研究應用實物期權方法研究完全競爭市場環境下的供應鏈管理中的能力決策問題。通過對能力投資決策的價值分析,給出柔性條件下的能力決策規則,并研究了市場演進的性質、投資成本
2009-06-14 00:22:31
大家好,我最近在研究無人駕駛車輛的運動決策方法,請各位大神指教,qq1113185817
2018-04-26 15:12:29
在物聯網大環境中,天工測控在智能穿戴、車聯網、無人機領域的無線模塊研發步伐明顯加快,推出多款高性能產品,強勢布局智能穿戴、車聯網和無人機等無線模塊應用。
2020-12-16 06:35:30
駕駛員的違章駕駛,降低車輛的交通事故。早在20世紀70年代,歐共體就開始全面強制使用機電模擬式汽車行駛記錄儀并使得交通事故率降低了30%-50%。90年代以來,美國、日本、馬來西亞、新加坡等國家也紛紛制定
2019-07-30 08:16:21
如何構建一輛無人駕駛車呢?
2021-09-30 07:37:34
與自動駕駛汽車互動。對道路測試來說,開發者首先需要掌握大量車輛碰撞數據,有較大把握了解潛在的碰撞風險,并對這些潛在碰撞進行多重模擬后,在確保安全的前提下才能開始進行路測。專家表示,我國人口稠密、交通
2019-05-13 00:26:37
,解決具有復雜交聯環境裝備嵌入式軟件測試環境搭建和測試開發的難題;還可以提高測試人員在承擔軟件測試任務的標準化、規范化與自動化水平。一、研制理由1、通用嵌入式系統測試平臺研制理由我單位承擔了大量的裝備型號研制與生產任務,這些裝備型號研制與生產任務中涉及大量的嵌入式設備,用于一些關鍵任務的控制和管理,系統的
2021-12-21 07:55:03
本文介紹了一種智能車控制系統的設計與實現方法。通過大量實驗測試證明,該智能車能快速平穩地在制作的賽道上跟蹤黑色引導線并行駛,而且尋跡效果良好,控制響應速度快,動態性能良好,穩態誤差小,系統的穩定性和抗干擾能力強。
2021-05-18 06:46:48
智能車競賽背景全國大學生智能車競賽是一項舉辦了十四屆的大學生自動控制類科技競賽,它要求指定的車模能夠在規定的賽道上實現路徑識別、自主尋跡,并快速行駛。麻雀雖小,五臟俱全,雖然競賽智能車沒有現實生活中
2021-07-29 06:00:40
無人駕駛技術現如今其實非常成熟了,就以現在的技術水平看,如果把大城市復雜的交通狀況變成實驗室特定的格局,場景內有制式統一的車輛以及符合規矩的行人正常通行,那么不用方向盤,全程自動行駛的汽車當下就可以
2017-10-23 17:51:41
汽車從京津高速臺湖收費站啟程,完成了中國首臺無人駕駛汽車的測試工作。 清華大學交通研究所原所長、國家汽車計算平臺工程項目專家組成員史其信說,中國機動車發展過快,路網有限,無法避免導致交通擁堵,這就
2013-01-07 17:09:36
輛”,就是在普通車輛的基礎上增加了先進的傳感器(雷達、攝像)、控制器、執行器等裝置,通過車載傳感系統和信息終端實現與人、車、路等的智能信息交換,使車輛具備智能的環境感知能力,能夠自動分析車輛行駛的安全及危險
2016-02-01 12:23:08
能做的事情,能夠看得明白,聽得到,能夠理解,并且能夠處理大數據。一臺無人車一天要處理10幾個T的數據,這是很龐大的。 最后,他表示,百度已經跟安徽蕪湖合作開拓無人車的試驗區,“我也很希望能夠看到未來第一個
2016-05-30 17:41:49
板階 (BLR) 車電可靠性驗證iST宜特可提供汽車電子及零部件一站式整合驗證服務。車用電子測試不僅著重于產品壽命測試,更重要的是,將產品結構及產品組裝質量觀念,帶入試驗中,例如推拉力測試、錫球接合
2018-09-06 16:56:38
,駕駛員視野不清;三是大風天氣,進入臺風場景,行駛阻力增大,受大風的影響,騎車人偏離本方線路左右搖晃行駛,與機動車發生碰撞; 四是高溫天氣,烈日炎炎,駕駛員容易疲勞瞌睡,還發生了爆胎事故,瀝青路面也打滑
2018-09-14 09:36:48
,適用于多種場景感知的毫米波雷達產品不斷涌現,如交通場景雷達、汽車雷達、智能檢測雷達等。此類毫米波雷達為道路管理、車端決策提供實時場景信息,在車路系統中發揮著不可替代的作用。目前毫米波雷達技術正向高分
2020-07-01 14:16:38
測試,而且采用安全性最高的磷酸鐵鋰電池,電池壽命長,支持電動車的高續航能力,充電方便且安全,無疑能促進未來香港可以廣泛地使用綠色交通工具,并為香港帶來巨大的經濟及環境效益。
2013-03-27 19:48:19
。 據了解,百度無人駕駛車項目起于2013年,由百度研究院主導研發,其技術核心是“百度汽車大腦”,包括高精度地圖、定位、感知、智能決策與控制四大模塊。百度無人駕駛車依托國際領先的交通場景物體識別技術和環境
2015-12-12 16:53:14
時會考慮損失大過收益”這一規律,確立無人車與人類駕駛車輛之間的關系,并建立了一個理論框架,以提高人類的駕駛體驗為前提,讓汽車預測它可以采取的行動。研究人員通過模擬人類駕駛車輛與無人車相遇時的場景來教會無人車
2018-08-15 11:03:50
不會取代現有的速遞模式,他們測試無人機速遞是為了減輕運營成本。UPS工程主管Mark Wallace表示,在農村地區,“我們的貨運車常常需要行駛幾英里才能完成單次快遞運輸。”該公司估計,通過削減一英里
2018-07-14 15:43:38
據的決策;平臺問題:沒有覆蓋多個景區的統一信息平臺,無法對進行導流,提升單個游客的價值;蘿卜車為旅游景區提供低碳智能代步工具,定制車身外形,打造獨特的景區旅游體驗。通過蘿卜車APP實現智能共享,可主動為
2018-07-01 20:19:08
系統裝備軟件的研發與生產質量,解決具有復雜交聯環境裝備嵌入式軟件測試環境搭建和測試開發的難題;還可以提高測試人員在承擔軟件測試任務的標準化、規范化與自動化水平。一、研制理由1、通用嵌入式系統測試平臺研制理由我單位承擔了大量的裝備型號研制與生產任務,這些裝備型號研制與生產任務中涉及大量的嵌入式設備,
2021-12-24 06:22:48
根據工業和信息化部、公安部、交通運輸部等三部委共同發布的《智能網聯汽車道路測試管理規范(試行)》,自動駕駛汽車是指搭載先進的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術,實現車與人、車
2020-08-14 07:08:52
在微觀交通仿真系統中,三維虛擬交通場景主要研究靜態物體的構建,對交通環境中各種動態因素研究較少。該文探討虛擬交通場景中虛擬汽車的視覺感知行為和決策行為,給出視
2009-04-06 08:47:50 10
10 ?1、車體配置多個3D激光雷達實現360°的3D環境感知,擁有極致的安全防護能力。?2、可精準識別棧板與導航避障,適用于各種室內外場景。?3、無需在環境中部署輔助設施,投入使用周期短,支持7*24h
2023-02-25 13:12:34
對自然場景下的交通標志進行準確的識別分類,是智能汽車的重要組成部分。交通標志本身數量眾多,其形態復雜,而自然場景下存在著光照變化、褪色污損、扭曲變形等情況對交通標
2010-02-21 10:57:4015 整車測試儀(道路簡易型) 一、設備概述:用于電動自行車車速限值及腳踏騎行能力檢測。進行電動自行車騎行的安全性能、電動車電性能檢測。檢驗數據能夠儲存、傳輸。測量參數為
2023-06-21 14:13:35
不久前由國防科技大學自主研制的紅旗HQ3無人車首次完成了從長沙到武漢286公里的高速全程無人駕駛實驗,創造了我國自主研制的無人車在復雜交通狀況下自主駕駛的新紀錄
2011-07-27 09:39:12 860
860 我國自主研發的無人駕駛汽車明年將進行從北京至天津的行駛測試,2015年將測試從北京行駛至深圳。
2012-10-19 09:10:17639 韓國國土交通部 26 日指出,自 2016 年 3 月 4 日起,到 11 月之間,獲得韓國國土交通部測試牌照的 6 家發展無人車企業或單位,以及這些企業或單位的 11 輛無人駕駛車,總計已經行駛里程超過 2.6 萬公里,而且至今在行時途中無發生任何事故。
2016-12-30 07:42:11418 http://softdown.elecfans.net/p/2017/09/無人駕駛的決策規劃控制技術2017 無人車作為一個復雜軟硬件結合系統,其安全可靠運行需要車載硬件、傳感器集成、感知預測
2017-09-28 19:43:460 無人車作為一個復雜軟硬件結合系統,其安全可靠運行需要車載硬件、傳感器集成、感知預測,以及控制規劃等多個模塊的協同配合工作。作者認為最關鍵的部分是感知預測和決策控制規劃的緊密配合。狹義上的決策規劃控制
2017-11-12 11:30:4612863 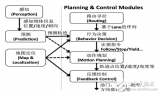
模塊化多電平換流器(modular multilevel converter,MMC)在復雜交直流網絡中有廣闊的應用前景。隨著MMC容量和電壓等級的提高,MMC的暫態行為對復雜交直流網絡的影響不能
2017-12-18 15:49:060 針對行業痛點,目前飛芯電子研發產品采用了連續波載調制或相干外差探測方案,利用焦平面點云測距技術,滿足較高的空間分辨率和較大的視場角,探測距離可超過200m,且無需復雜昂貴的機械掃描裝置,不斷提高系統可靠性,也使獲得的圖像更為清晰。
2018-08-09 15:20:223372 8月24日上午,7架“無人植保機”在江蘇金色農業股份有限公司優質雜交水稻制種基地大豐區三龍作業區上空進行噴灑赤霉素“920”作業,以更好、更及時、更平衡地促進雜交水稻公母本齊穗揚花。
2018-08-28 11:46:272818 將平行智能這一本世紀初提出的原創性研究范式引入車聯網領域, 以有效解決時變、異質、復雜交通環境下車聯網的建模、規劃與決策、優化管理等問題。
2018-10-28 09:51:3417042 
11月30日報道,美國東北無人機空域一體化研究聯盟( NUAIR )宣布,目前已成功為小型無人機完成首次新型機載防撞規避系統 ACAS Xu 的驗證測試。
2018-12-03 15:01:223413 本文檔的主要內容詳細介紹的是我國5G無人機的典型應用場景和發展建議資料說明。
2018-12-31 08:57:004982 基于車路協同的重新構建的復雜交通系統,必須采用群體智能協同控制的方式來解決。
2019-01-17 16:11:5710108 
實現無人駕駛是人工智能領域面臨的重大挑戰之一,應對這一挑戰需要發展一種新的圖靈測試方法,以測試和驗證無人車對復雜交通場景的理解和行駛決策的能力, 進而推動無人駕駛技術的發展。
2019-03-29 15:40:361246 與智能汽車和智能網聯汽車相比,無人駕駛汽車需要具有更先進的環境感知系統、中央決策系統以及底層執行系統。無人駕駛汽車能夠實現完全自動的控制,全程檢測交通環境,能夠實現所有的駕駛目標。
2019-07-09 17:17:161910 大疆創新推出的大疆政企版無人機系統,已通過美國內政部的官方測試與獨立驗證。
2019-07-11 11:08:122163 光伏發電站高電壓穿越能力檢測應包括光伏發電單元高電壓穿越能力測試以及光伏發電站高電壓穿越能力驗證,其基本要求有以下幾個方面。
2020-01-23 17:36:005785 
12月上旬,鄭州聯勤保障中心組織數家無人機生產制造廠商和多家駐軍單位代表,對無人機運輸投送指揮控制能力進行實飛驗證。
2020-01-05 11:54:26688 該項目將有效提升智加無人重卡導航能力,從容應對全地形和復雜天氣狀況。
2020-01-13 14:50:462013 10月21日,常態化運營的5G無人公交在蘇州落地。這個在蘇州高鐵新城亮相的無人公交是在開放的城市道路上運行,且速度可達20—50千米/時。這輛無人公交車除了具備避讓行人車輛、自動變道、自動轉向、紅綠燈識別等基本功能,還能應對各類城市復雜交通場景,例如穿行人車混雜的路口、應對后車加塞、“鬼探頭”等。
2020-10-30 09:31:211793 城市綜合管理平臺)提供無人車車端感知數據,為城市交通組織和精細化管理提供決策依據。 ? “車端感知數據”主要指小馬智行自動駕駛車輛在行駛過程中其系統感知的交通路況信息。無論是街道上突然出現的障礙物、暴雨天迅速漲起的
2021-03-05 10:53:181535 為解決無人機集群網絡在復雜通信環境中對抗智能性干擾能力較弱的問題,基于智能決策理論,提岀一種多域聯合的認知抗干擾算法。該算法在優勢演員-評論家算法的基礎上,將無人機視作智能體,并由感知到的環境頻譜
2021-03-16 10:42:158 車聯網環境中,交通系統將長期昰現智能網聯汽車和債統人工駕駛車輛混合共存的狀況。針對智能網聯交通環境下的新型混合車流,建立了車輛的換道行汋決策模型。對于混合車輛交通流引λ最小安全區琙模型,自主車輛交通
2021-05-07 16:18:0613 基于低耗散中興迎風格式的復雜交通流模型求解
2021-06-25 15:12:473 基于感知體驗和主觀幸福感的交通出行決策
2021-07-02 15:29:253 在一個與奧迪的聯合項目中,羅德與施瓦茨和Vector Informatik一起開發了交通場景C-V2X測試解決方案。
2021-12-08 15:31:401328 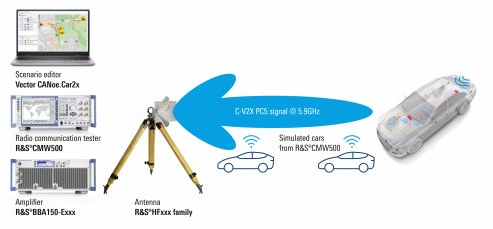
基于圖的場景模型捕獲關鍵的設計和驗證知識,通過通用模型實現 SoC 項目團隊成員之間更好的溝通,減少流程中多個點的人工工作,加快進度,更完整地驗證設計以增加獲得第一名的機會- 硅成功。
2022-06-28 14:55:27682 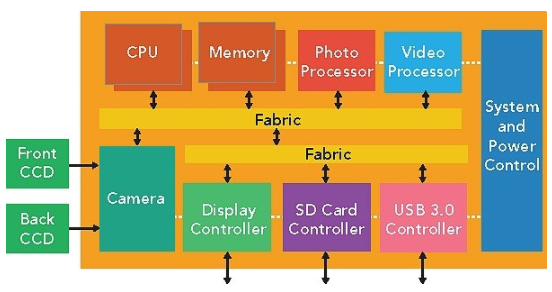
獲得許可后,小馬智行10輛無人化測試車將在經開區60平方公里的核心區內開始全新的測試形式,覆蓋亦莊復雜的城區道路場景,有助于安全可控地提升無人化技術驗證的效率,并逐步擴大測試規模和范圍。
2022-11-22 10:47:21375 物流園、東海大橋等自動駕駛公開測試道路,路線全程約62公里。圖森未來自動駕駛卡車在面對港區和高速、快速道路等復雜路況時展現了強大的處理能力,包括交通信號燈識別、上下匝道、變道行駛、避讓緊急車道車輛、應對車道部分封路和大霧側風天氣等場景
2023-06-16 14:37:34353 IP核的開發過程中,面臨著許多關鍵技術,比如IP核的規格定義、基于接口的設計、IP核測試存取結構標準、IP核的驗證與打包等。對于IP核的驗證,主要是建立參照模型和測試平臺,然后進行回歸測試和形式驗證
2022-06-10 11:50:16373 
IP核的開發過程中,面臨著許多關鍵技術,比如IP核的規格定義、基于接口的設計、IP核測試存取結構標準、IP核的驗證與打包等。對于IP核的驗證,主要是建立參照模型和測試平臺,然后進行回歸測試和形式驗證
2022-06-13 11:47:03317 
核的不同模塊進行實體/塊的仿真。前文回顧如何測試與驗證復雜的FPGA設計(1)——面向實體或塊的仿真在本篇文章中,我們將介紹如何在虹科IP核中執行面向全局的仿真,而這也是測
2022-06-15 17:31:20389 仿真和驗證是開發任何高質量的基于FPGA的RTL編碼過程的基礎。在前文中,我們介紹了面向實體/塊的仿真,并介紹了如何在虹科的IP核中執行面向全局的仿真。前文回顧虹科干貨|如何測試與驗證復雜的FPGA
2022-06-18 15:58:17849 由于礦區環境相對封閉,行駛路線固定且行駛速度慢,但工況復雜、環境惡劣,因此,礦區運輸礦卡無人化在礦山場景得到快速推廣、規模化落地應用。據了解,2020-2025年是我國礦區自動駕駛的重點建設期,市場
2022-11-22 09:54:45348 
指揮中心,實現對城市交通的監控、分析、調度。 由于城市交通數據量巨大、復雜度高、變化快,傳統的交通指揮中心面臨著海量數據處理的壓力,難以滿足實時性、準確性和指揮決策的要求。為了提高信息處理能力,實現數字化轉型,巧奪天工
2023-07-14 17:51:46220 三維場景理解與重建技術主要包含場景點云特征提取、掃描點云配準與融合、場景理解與語義分割、掃描物體點云補全與細粒度重建等,在處理真實掃描場景時,受到掃描設備、角度、距離以及場景復雜程度的影響,對技術的精準度和穩定性提出了更高的要求,相關的技術也十分具有挑戰性。
2023-08-08 16:58:53636 
LanguageMPC首次將LLM應用于駕駛場景,并設計了將文字形式高層決策轉化為可操作駕駛行為的方法。我們定量的證明了LanguageMPC在路口和環島等復雜交通場景中均優于現有基于學習和基于優化的自動駕駛系統。
2023-10-10 15:57:20347 
,要獲得“滿意”評價結果除了總分需達到60分以上,還需在 3個子項 (需求理解與測試設計、腳本編寫、測試結果)均 達到指定的分數。 易華錄產品檢測中心以 95高分 完成性能效率測試能力驗證,成績在參與能力驗證的全國282家實驗室中名列前茅,評價結果為 “滿意”
2023-11-14 18:25:01273 隨著人工智能(AI)的發展,其在各個領域的應用越來越廣泛,從醫療診斷到金融交易,從自動駕駛到智能家居。然而,盡管AI的能力在不斷提升,但其決策過程卻常常讓人感到困惑和不安。那么,我們應該如何理解
2023-11-22 09:39:08209 隨著航空業的快速發展,空中交通的復雜性和密度不斷增加,對空中交通指揮車的要求也越來越高。訊維車載中控系統憑借其強大的數據處理能力和決策支持功能,為空中交通指揮車提供了高效、準確的解決方案,實現
2024-03-06 16:07:4779
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論