 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻PID參數(shù)如何設(shè)定調(diào)節(jié)及倒立擺說(shuō)明匯總與倒立擺程序免費(fèi)下載
資料介紹
本文檔的主要內(nèi)容詳細(xì)介紹的是PID參數(shù)如何設(shè)定調(diào)節(jié)及倒立擺說(shuō)明匯總與倒立擺程序免費(fèi)下載
PID參數(shù)如何設(shè)定調(diào)節(jié) - -
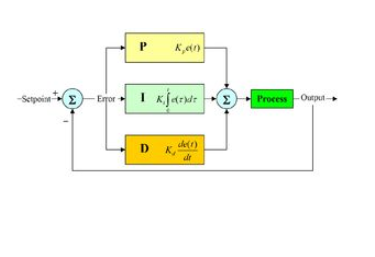
比例(P)控制
比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。 自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過(guò)程中可能會(huì) 出現(xiàn)振蕩甚至失穩(wěn)。其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。這就是說(shuō),在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì),這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對(duì)有較大慣性或滯后的被控對(duì)象,比例+微分(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過(guò)程中的動(dòng)態(tài)特性。
5、PID控制器的參數(shù)整定
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過(guò)程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類:一是理論計(jì)算整定法。它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過(guò)理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還必須通過(guò)工程實(shí)際進(jìn)行調(diào)整和修改。二是工程整定方法,它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡(jiǎn)單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。三種方法各有其特點(diǎn),其共同點(diǎn)都是通過(guò)試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定。但無(wú)論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行PID控制器參數(shù)的整定步驟如下:(1)首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作﹔(2)僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期﹔(3)在一定的控制度下通過(guò)公式計(jì)算得到PID控制器的參數(shù)。
- 倒立擺入門詳解+pid調(diào)參
- 電子設(shè)計(jì)大賽倒立擺程序資料合集免費(fèi)下載 13次下載
- 倒立擺PID源代碼參考資料下載 20次下載
- 倒立擺的matlab仿真建模案例 61次下載
- 基于STM32和增量PID的旋轉(zhuǎn)倒立擺的設(shè)計(jì) 19次下載
- 一級(jí)倒立擺的PID控制設(shè)計(jì) 64次下載
- 旋轉(zhuǎn)倒立擺源程序 38次下載
- 移動(dòng)的倒立擺資料 0次下載
- 基于變速積分的PID一級(jí)倒立擺研究 73次下載
- 環(huán)形單級(jí)倒立擺起擺控制研究 67次下載
- 環(huán)形倒立擺 136次下載
- 倒立擺的模糊控制研究
- 基于DSP實(shí)現(xiàn)的一階倒立擺控制
- 基于LQR最優(yōu)調(diào)節(jié)器的倒立擺控制系統(tǒng)
- 單級(jí)倒立擺復(fù)合控制設(shè)計(jì)與實(shí)現(xiàn)
- PID調(diào)節(jié)器的作用和工作原理 3473次閱讀
- 為什么電路里總要擺兩個(gè)電容? 1700次閱讀
- 如何整定調(diào)節(jié)系統(tǒng)的P、I、D參數(shù) 3104次閱讀
- 電流設(shè)定調(diào)節(jié)及原理,恒流源中對(duì)電壓的設(shè)定范圍 1.3w次閱讀
- 采用極點(diǎn)配置法實(shí)現(xiàn)倒立擺系統(tǒng)的設(shè)計(jì) 7321次閱讀
- 采用16位結(jié)構(gòu)的微控制器實(shí)現(xiàn)二級(jí)倒立擺系統(tǒng)的設(shè)計(jì) 1678次閱讀
- A842擺臂電機(jī)擺動(dòng)的程序步驟 3089次閱讀
- STC90C51單片機(jī)在倒立擺控制系統(tǒng)中的應(yīng)用 4110次閱讀
- 淺析PID控制基本原理及參數(shù)調(diào)節(jié) 6980次閱讀
- 簡(jiǎn)易平衡機(jī)器人制作圖解 6936次閱讀
- 簡(jiǎn)易太陽(yáng)能擺制作教程 5724次閱讀
- 動(dòng)態(tài)參數(shù):壓擺率跟建立時(shí)間到底什么? 5969次閱讀
- 詳細(xì)解析如何整定調(diào)節(jié)系統(tǒng)的PID參數(shù) 1.8w次閱讀
- 倒立擺是什么_倒立擺有什么用 5.7w次閱讀
- 風(fēng)力擺是什么_風(fēng)力擺的機(jī)械結(jié)構(gòu) 1.9w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 2錦銳科技CA51F2 SDK開(kāi)發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 3錦銳CA51F005 SDK開(kāi)發(fā)包
- 19.47 MB | 5次下載 | 1 積分
- 4蘋果iphone 11電路原理圖
- 4.98 MB | 4次下載 | 2 積分
- 5基礎(chǔ)模擬電子電路
- 3.80 MB | 4次下載 | 1 積分
- 6STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊(cè)
- 3.32 MB | 4次下載 | 免費(fèi)
- 7蘋果ipad5電路原理圖
- 1.23 MB | 1次下載 | 2 積分
- 8PCB的EMC設(shè)計(jì)指南
- 2.47 MB | 1次下載 | 1 積分
本月
- 1AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 383次下載 | 免費(fèi)
- 2蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 296次下載 | 5 積分
- 3貼片三極管上的印字與真實(shí)名稱的對(duì)照表詳細(xì)說(shuō)明
- 0.50 MB | 94次下載 | 1 積分
- 4長(zhǎng)虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 91次下載 | 5 積分
- 5涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 6錦銳科技CA51F2 SDK開(kāi)發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 7AO4803A雙P通道增強(qiáng)型場(chǎng)效應(yīng)晶體管的數(shù)據(jù)手冊(cè)
- 0.11 MB | 28次下載 | 2 積分
- 8長(zhǎng)虹液晶彩電LS29機(jī)芯的技術(shù)資料說(shuō)明
- 3.42 MB | 16次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開(kāi)源硬件-PMP21529.1-4 開(kāi)關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191388次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論