 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
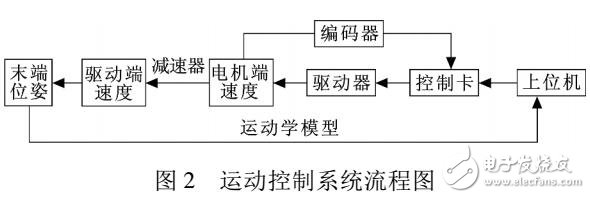
隨著國內外傳感與控制技術的不斷突破與發展,機器人尤其是并聯機器人在各個交叉領域的應用越來越廣泛。并且加之柔性自動化裝配具有的數字化、自動化、集成化等特點,因此面向柔性自動化裝配的各類機器人能夠提高生產率和靈活度,且能滿足大批量生產活動。所以對面向柔性自動化裝配的Stewart機器人的研究很有必要。文中設計的Stewart機器人傳感與控制系統,傳感系統(下面稱力感知系統)能夠通過建立合理的力感知系統的數學模型,通過設計合理的力傳感器布局,設計合理的數據采集系統方案,實現對軸工件與7L工件接觸時空間六維力的測量,從而為裝配操作提供力和力矩的反饋數據。控制系統能夠根據對機器人動平臺的位姿要求,重點在于建立合理的運動學模型,通過上位機發送相應的指令給控制器,再通過驅動器、電機對每一根關節進行單獨控制,從而實現對機器人動平臺的運動控制要求。
所述Stewart并聯機器人系統主要由三部分組成:一是力感知系統;二是運動控制系統;三是六自由度并聯機器人機械本體,它包括動平臺、靜平臺、夾持器,動平臺由絲桿螺母驅動,絲桿螺母通過虎克鉸與動靜平臺連接。對于力感知系統,其末端執行器在夾持工件進行孔和軸的裝配時,會受到力和力矩,故需要力傳感器進行空間六維力的測量,然后通過數據采集系統將傳感器受到的力反映到上位機,接著要根據傳感器端受力與工件端所受力和力矩的數學模型,反求出工件所受的力和力矩。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于雙串口單片機的上肢康復機器人交互控制系統 13次下載
- 機器人關節伺服控制系統設計與仿真 40次下載
- 基于EtherCAT等的協作機器人控制系統 1次下載
- 基于DSP和PC的農業機器人控制系統 18次下載
- 基于DSP的排險機器人車體控制系統 14次下載
- 基于EtherCAT和TwinCAT3的協作機器人控制系統 14次下載
- 基于碼垛機器人控制系統的應用設計 13次下載
- 機器人控制系統的特點分析 11次下載
- 基于OpenMP的Stewart并聯機器人控制系統_李昂 4次下載
- 步進電機控制系統建模及運行曲線仿真 20次下載
- 無刷直流電機自適應模糊控制系統建模與仿真 16次下載
- 盤式感應電機SVPWM矢量控制系統建模仿真 18次下載
- 基于ARM的機器人走迷宮控制系統與算法設計 27次下載
- 基于AVR的比賽機器人控制系統研究 87次下載
- 變電站巡檢機器人控制系統設計
- KUKA機器人控制系統的網絡連接 3469次閱讀
- 機器人控制系統概念與系統特點 5582次閱讀
- 基于仿人機器人的多功能通用型控制系統的設計 2199次閱讀
- 基于PIC單片機和PSC控制器實現機器人控制系統的設計 4088次閱讀
- 一文了解機器人控制系統 5296次閱讀
- 機器人控制系統的發展趨勢 5364次閱讀
- 機器人控制系統分類_機器人控制系統有哪些 2.6w次閱讀
- 淺析工業機器人的控制系統 1981次閱讀
- 移動機器人控制系統的發展方向? 1529次閱讀
- 移動機器人控制系統設計與仿真 3642次閱讀
- 機器人控制系統概念!機器人控制系統的基本要求 9898次閱讀
- 機器人控制系統的基本單元與機器人控制系統的特點分析 1.1w次閱讀
- 基于PLC的機器人伺服運動控制系統設計詳解 1.6w次閱讀
- 機器人控制系統一文讓你全看懂 7588次閱讀
- 詳細解析工業機器人控制系統 3.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 11次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5DIY動手組裝LED電子顯示屏
- 0.98 MB | 3次下載 | 免費
- 6基于FPGA的C8051F單片機開發板設計
- 0.70 MB | 2次下載 | 免費
- 751單片機PM2.5檢測系統程序
- 0.83 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537797次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191186次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論