 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
今天我們將制作一個Arduino控制的機器人。它有點類似于我之前的項目。唯一的區(qū)別是我沒有使用陀螺儀傳感器,而是使用了操縱桿模塊。機器人使用 Rf (ASK) 發(fā)射器和接收器模塊進行無線控制。這兩個電路均由兩個 ??Arduino 板組成,均使用 9 V 電池供電。
在職的 -
這個項目的工作非常簡單。操縱桿模塊為 X 和 Y 軸運動提供模擬值。然后借助各種 if else 語句將該值與設置值進行比較。并據(jù)此向接收方發(fā)送一個字符。就像在這種情況下,字符“a”被發(fā)送用于機器人的向前移動。
這些字符然后由另一端的 Rf 接收器接收。接收器的工作就是接收字符并將其發(fā)送到 Arduino。Arduino 然后根據(jù)發(fā)送的字符移動機器人。運動由 L293d 電機驅動模塊控制。這是該項目的基本工作。現(xiàn)在讓我們開始構建這個機器人。
第 1 步:獲取耗材!!!
購買耗材是任何項目的關鍵部分。最重要的是價格合適。為此,我建議您從UTSource.net網(wǎng)站購買它們。他們以低成本和快速運輸提供優(yōu)質組件。他們還為制造商和原型制造商提供高質量的 PCB。現(xiàn)在就去看看他們,并利用他們免費的一個月 Plus 會員試用,這給客戶帶來了很多好處。
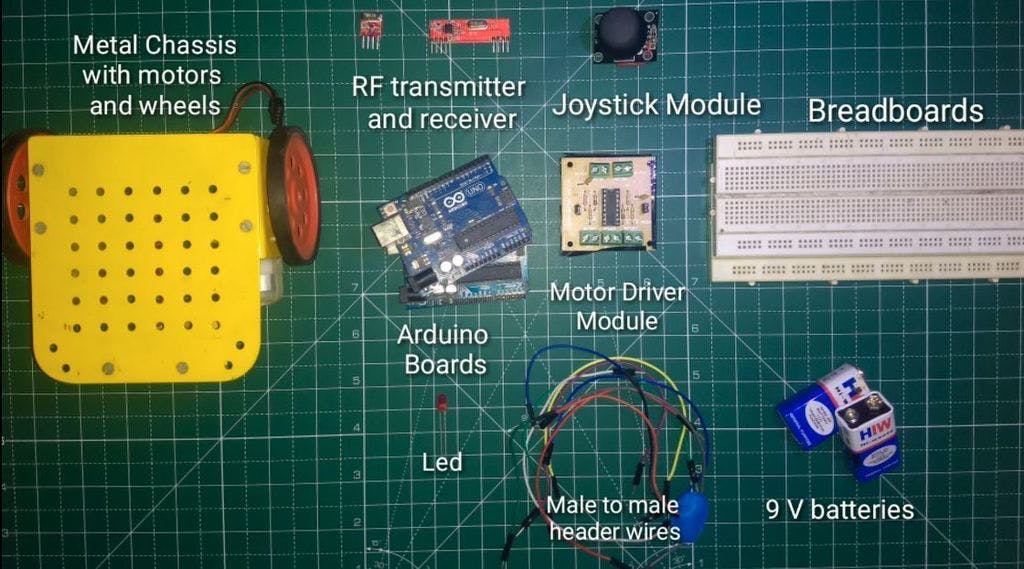
現(xiàn)在讓我們快速瀏覽一下構建這個機器人所需的東西:
2.搖桿模組x 1
3. 射頻發(fā)射和接收模塊 x 1
4. 電機驅動模塊 (L293D) x 1
5. 面包板 x 2
6. 帶輪子和電機的金屬底盤。
7.帶領
8. 頭線
9.電池(9V)
第 2 步:電路圖
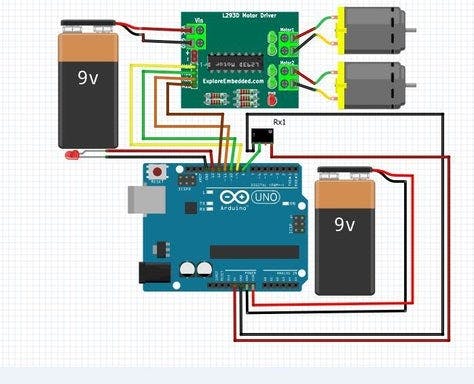
該項目的電路圖非常簡單。構建這個項目大約只需要 10 分鐘。連接顯示在上面的電路圖中。操縱桿模塊連接到兩個模擬輸入,發(fā)射器連接到數(shù)字引腳。這里我使用了 pin 12。你可以使用串行端口,但這會在上傳草圖時導致問題。因此,改為使用虛擬線庫并將其他一些引腳設為 tx 引腳。
接收器部分由電機驅動模塊和射頻接收器組成。我們在這里再次使用了虛擬線庫。如果接收到字符,則連接一個 LED 以獲取狀態(tài)。兩塊板均使用 9 V 電池供電。一個單獨的電池用于為電機驅動模塊供電。
第 3 步:上傳草圖
現(xiàn)在讓我們將草圖上傳到 Arduino 板上。你可以從下面得到草圖。
// 發(fā)送器代碼
#include
const int X_AX = A0;
const int Y_AX = A1;
void setup()
{
Serial.begin(9600);
Serial.println("setup");
vw_setup(2000);
vw_set_tx_pin(12);
}
void loop()
{
int xval = analogRead(X_AX);
int yval = analogRead(Y_AX);
if(xval<=261&&xval>=0)
{
char *msg2 = "a";//send a to the receiver
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("a");
}
else if(xval<=1023&&xval>=782)
{
char *msg2 = "b";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("b");
}
else if(yval<=261&&yval>=0)
{
char *msg2 = "c";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("c");
}
else if(yval<=1023&&yval>=782)
{
char *msg2 = "d";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("d");
}
else
{
char *msg2 = "e";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("e");
}
}
// RECIEVER CODE
#include //Motor A right
const int motorPin1 = 9; // Pin 9 of L293D
const int motorPin2 = 10; // Pin 10 of L293D
//Motor B left
const int motorPin3 = 11; // Pin 11 of L293D
const int motorPin4 = 12; // Pin 12 of L293D
void setup()
{
Serial.begin(9600);
Serial.println("setup");
vw_setup(2000);
vw_set_rx_pin(8);
vw_rx_start();
pinMode(13, OUTPUT);
//digitalWrite(13, HIGH);
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}if (vw_get_message(buf, &buflen))
{
int i;
for (i = 0; i < buflen; i++)
{
if(buf[i] == 'a')//if button a is pressed.... i.e.forward buton
{
digitalWrite(13, HIGH);
Serial.println("Forward");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);//FORWARD
digitalWrite(motorPin3, LOW );
digitalWrite(motorPin4, HIGH);
}
if(buf[i] == 'b')
{
digitalWrite(13, HIGH);
Serial.println("Backward");
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);//REVERSE
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
}
if(buf[i] == 'c')
{
digitalWrite(13, HIGH);
Serial.println("Left");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);//LEFT
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
}
if(buf[i] == 'd')
{
digitalWrite(13, HIGH);
Serial.println("Right");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);//RIGHT
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}
if(buf[i] == 'e')
{
digitalWrite(13, LOW);
Serial.println("Stop");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);//STOP
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}
Serial.print(" ");
}
Serial.println("");
}
}
上傳代碼后,連接電池并運行您的項目。如果機器人向操縱桿的相反方向移動,則只需交換電機線即可。
第 4 步:項目的運作
。如果您喜歡我制作的內(nèi)容,請不要忘記與您的朋友分享這個教程。也關注我,因為我經(jīng)常想出這樣的項目。如果您對此項目有任何疑問,請在下方評論。我會盡力幫助你。就這樣吧。看到你會與另一個很棒的項目。謝謝你。
.
- 如何制作Arduino智能移動機器人
- 制作一個基于Arduino的邊緣避讓機器人
- 使用Arduino制作兩輪機器人
- 使用Arduino和L293d shield制作語音控制機器人
- 如何使用Arduino Uno制作智能避障機器人
- 如何在沒有Arduino情況下制作機器人
- 如何制作Arduino人類跟隨機器人
- 如何制作與Arduino配合使用的避障機器人
- 如何使用Arduino制作跟隨機器人
- 如何制作Arduino相撲機器人
- Arduino和微型伺服系統(tǒng)制作的機器人
- 如何在家制作DIY Arduino手勢控制機器人
- 基于Arduino系統(tǒng)拉線墻畫機器人設計制作 12次下載
- Arduino教學機器人的使用教程免費下載 38次下載
- Arduino機器人制作指南-奧松機器人 34次下載
- 如何使用PLC控制機器人 1883次閱讀
- 如何利用Arduino UNO制作一個爬樓梯機器人 4296次閱讀
- 如何使用Arduino制造一個自動平衡機器人 4833次閱讀
- 基于SMARS 機器人的3D打印部件設計 3382次閱讀
- 基于使用Arduino板及電機驅動器對機器人進行編程介紹 3840次閱讀
- dfrobotDevastator履帶機器人移動平臺簡介 1658次閱讀
- 機器人控制系統(tǒng)分類_機器人控制系統(tǒng)有哪些 2.6w次閱讀
- 工業(yè)機器人技術應用 5343次閱讀
- 機器人控制器有哪些類型_機器人控制器發(fā)展 1.2w次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8322次閱讀
- 移動機器人控制系統(tǒng)設計與仿真 3641次閱讀
- 簡易機器人制作圖解 1w次閱讀
- 機器人的運動控制的介紹和如何將機器人的運動控制分成4種任務 1w次閱讀
- 基于PLC的機器人伺服運動控制系統(tǒng)設計詳解 1.6w次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論