完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 數控系統

數控系統是數字控制系統的簡稱,英文名稱為(Numerical Control System),根據計算機存儲器中存儲的控制程序,執行部分或全部數值控制功能,并配有接口電路和伺服驅動裝置的專用計算機系統。
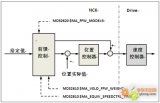
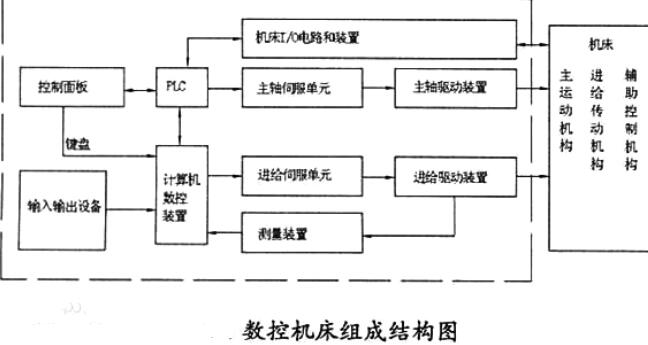
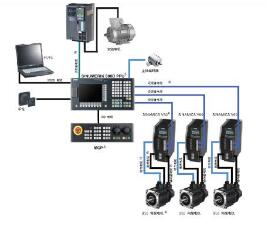
世界上的數控系統種類繁多,形式各異,組成結構上都有各自的特點。這些結構特點來源于系統初始設計的基本要求和硬件和軟件的工程設計思路。對于不同的生產廠家來說,基于歷史發展因素以及各自因地而異的復雜因素的影響,在設計思想上也可能各有千秋。例如,在上世界90年代,美國Dynapath系統采用小板結構,熱變形小,便于板子更換和靈活結合,而日本FANUC系統則趨向大板結構,減少板間插接件,使之有利于系統工作的可靠性。然而無論哪種系統,它們的基本原理和構成是十分相似的。一般整個數控系統由三大部分組成,即控制系統,伺服系統和位置測量系統。控制系統硬件是一個具有輸入輸出功能的專用計算機系統,按加工工件程序進行插補運算,發出控制指令到伺服驅動系統;測量系統檢測機械的直線和回轉運動位置、速度,并反饋到控制系統和伺服驅動系統,來修正控制指令;伺服驅動系統將來自控制系統的控制指令和測量系統的反饋信息進行比較和控制調節,控制PWM電流驅動伺服電機,由伺服電機驅動機械按要求運動。這三部分有機結合,組成完整的閉環控制的數控系統。
控制系統硬件是具有人際交互功能,具有包括現場總線接口輸入輸出能力的專用計算機。伺服驅動系統主要包括伺服驅動裝置和電機。位置測量系統主要是采用長光柵或圓光柵的增量式位移編碼器。
數控系統是數字控制系統的簡稱,英文名稱為(Numerical Control System),根據計算機存儲器中存儲的控制程序,執行部分或全部數值控制功能,并配有接口電路和伺服驅動裝置的專用計算機系統。通過利用數字、文字和符號組成的數字指令來實現一臺或多臺機械設備動作控制,它所控制的通常是位置、角度、速度等機械量和開關量。
世界上的數控系統種類繁多,形式各異,組成結構上都有各自的特點。這些結構特點來源于系統初始設計的基本要求和硬件和軟件的工程設計思路。對于不同的生產廠家來說,基于歷史發展因素以及各自因地而異的復雜因素的影響,在設計思想上也可能各有千秋。例如,在上世界90年代,美國Dynapath系統采用小板結構,熱變形小,便于板子更換和靈活結合,而日本FANUC系統則趨向大板結構,減少板間插接件,使之有利于系統工作的可靠性。然而無論哪種系統,它們的基本原理和構成是十分相似的。一般整個數控系統由三大部分組成,即控制系統,伺服系統和位置測量系統。控制系統硬件是一個具有輸入輸出功能的專用計算機系統,按加工工件程序進行插補運算,發出控制指令到伺服驅動系統;測量系統檢測機械的直線和回轉運動位置、速度,并反饋到控制系統和伺服驅動系統,來修正控制指令;伺服驅動系統將來自控制系統的控制指令和測量系統的反饋信息進行比較和控制調節,控制PWM電流驅動伺服電機,由伺服電機驅動機械按要求運動。這三部分有機結合,組成完整的閉環控制的數控系統。
控制系統硬件是具有人際交互功能,具有包括現場總線接口輸入輸出能力的專用計算機。伺服驅動系統主要包括伺服驅動裝置和電機。位置測量系統主要是采用長光柵或圓光柵的增量式位移編碼器。
從硬件結構上的角度,數控系統到目前為止可分為兩個階段共六代,第一階段為數值邏輯控制階段,其特征是不具有CPU,依靠數值邏輯實現數控所需的數值計算和邏輯控制,包括第一代是電子管數控系統,第二代是晶體管數控系統,第三代是集成電路數控系統;第二個階段為計算機控制階段,其特征是直接引入計算機控制,依靠軟件計算完成數控的主要功能,包括第四代是小型計算機數控系統,第五代是微型計算機數控系統,第六代是PC數控系統。
由于上世紀90年代開始,PC結構的計算機應用的普及推廣,PC構架下計算機CPU及外圍存儲、顯示、通訊技術的高速進步,制造成本的大幅降低,導致PC構架數控系統日趨成為主流的數控系統結構體系。PC數控系統的發展,形成了“NC+PC”過渡型結構,既保留傳統NC硬件結構,僅將PC作為HMI。代表性的產品包括FANUC的160i,180i,310i,840D等。還有一類即將數控功能集中以運動控制卡的形式實現,通過增擴NC控制板卡(如基于DSP的運動控制卡等)來發展PC數控系統。典型代表有美國DELTA TAU公司用PMAC多軸運動控制卡構造的PMAC-NC系統。另一種更加革命性的結構是全部采用PC平臺的軟硬件資源,僅增加與伺服驅動及I/O設備通信所必需的現場總線接口,從而實現非常簡潔硬件體系結構。
軟件結構
(1)輸入數據處理程序
它接收輸入的零件加工程序,將標準代碼表示的加工指令和數據進行譯碼、數據處理,并按規定的格式存放。有的系統還要進行補償計算,或為插補運算和速度控制等進行預計算。通常,輸入數據處理程序包括輸入、譯碼和數據處理三項內容。
(2)插補計算程序
CNC系統根據工件加工程序中提供的數據,如曲線的種類、起點、終點、既定速度等進行中間輸出點的插值密化運算。上述密化計算不僅要嚴格遵循給定軌跡要求還要符合機械系統平穩運動加減速的要求。根據運算結果,分別向各坐標軸發出形成進給運動的位置指令。這個過程稱為插補運算。計算得到進給運動的位置指令通過CNC內或伺服系統內的位置閉環、速度環、電流環控制調節,輸出電流驅動電機帶動工作臺或刀具作相應的運動,完成程序規定的加工任務。
CNC系統是一邊插補進行運算,一邊進行加工,是一種典型的實時控制方式。
(3)管理程序
管理程序負責對數據輸入、數據處理、插補運算等為加工過程服務的各種程序進行調度管理。管理程序還要對面板命令、時鐘信號、故障信號等引起的中斷進行處理。在PC化的硬件結構下,管理程序通常在實時操作系統的支持下實現。
(4)診斷程序
診斷程序的功能是在程序運行中及時發現系統的故障,并指出故障的類型。也可以在運行前或故障發生后,檢查系統各主要部件(CPU、存儲器、接口、開關、伺服系統等)的功能是否正常,并指出發生故障的部位。

廣州數控設備有限公司(簡稱:廣州數控)成立于1991年,歷經創業、創新、創造。面向數控機床行業、自動化控制領域、注塑制品行業。中國南方數控產業基地,廣...
國產高檔數控系統的差距,還表現在產品的系列化不全,如伺服電機、伺服驅動從小到大各種規格,國外都有,而我們的規格有限;在高速(快速進給速度40米/分以上)...
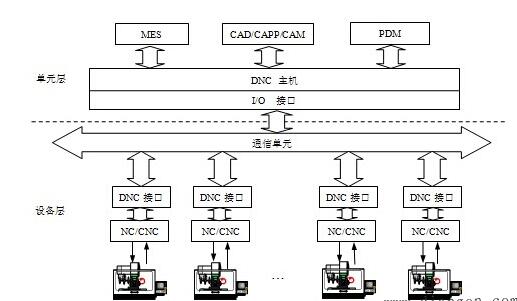
設計和采用DNC系統的主要目的之一,是改變數控加工程序輸入方式,直接通過計算機之間的通信功能,聯機下載;同時,減少數控機床配備穿孔機等硬設備的費用,降低...
本文主要闡述了數控系統發展現狀及發展趨勢。1952 年,美國麻省理工學院研制出第一臺試驗性數控系統,開創了世界數控系統技術發展的先河。20 世紀 80 ...
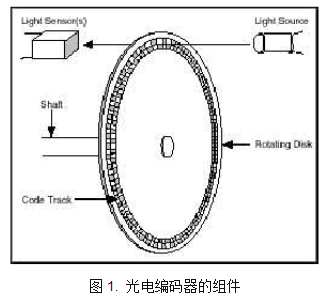
除此之外,有些正交編碼器還包含被稱為零信號或者參考信號的第三個輸出通道。這個通道每旋轉一圈輸出一個單脈沖。你可以使用這個單脈沖來精確計算某個參考位置。在...

高速化、高精度、低成本、小型化數控控制系統已經成為數控機床加工行業的發展趨勢。本文提出QT+Linux+Microblaze的設計方法,由QT設計人機交...
本文首先介紹了數控系統的常見故障,其次介紹了數控系統常見故障及造成原因,最后介紹了數控系統故障診斷常用的8種方法。
西門子系統的跟隨誤差(Following Error)一般是指位置環的位置編程值和實際值之間的差值,它反映了機床動態跟隨精度和靜態定位精度。
車刀刀尖半徑補償是數控車削加工中的常見問題,本文就刀尖半徑的影響進行分析,根據不同功能的數控系統進行刀尖半徑補償方法等進行介紹。
計算機數控系統由硬件和軟件兩部分構成,對CNC系統體系結構的認識應該從硬件和軟件兩個方面來進行。其核心是計算機數字控制裝置。它通過系統控制軟件配合系統硬...
數控等離子切割機弧切割起弧方式 1、接觸式:即把與極針絕緣的噴嘴貼在工件(聯接切割電源正端)上,然后把高頻高壓電流加到聯接電源負端的電極針(鎢針),使極...
智能車床及車削中心作為單機產品,能夠滿足一般小型簡單零件的生產制造,然而隨著工業生產模式向自動化和柔性化轉型升級,傳統的流水線作業已經無法滿足現有高精度...
從1952年美國麻省理工學院研制出第一臺試驗性 數控系統 ,到現在已走過了46年歷程。數控系統由當初的電子管式起步,經歷了以下幾個發展階段,請看本文詳解...
2020-03-06 標簽:數控系統 8409 0
數控系統的主要功能:CNC裝置能控制的軸數以及能同時控制(即聯動)軸數是主要性能之一。一般數控車床只需2軸控制2軸聯動;一般銑床需要2軸半或3軸控制、3...
由于數控機床自動化程度高,結構復雜,所以故障率也較普通機床設備高,維修難度系數也較大,同時對數控機床維修人員的專業技術要求也非常高,當數控機床出現故障后...
數控體系的邏輯操控,如刀庫辦理,液壓發動等,主要由PLC來完結,要完結這些操控就有必要收集各操控點的狀況信息,如斷電器,伺服閥,指示燈等。因此它與外界品...
數控系統一般應用于數控機床與工業機器人等工控自動化裝備,這些裝備廣泛應用于國防軍工、汽車船舶、機械制造和石油化工等工業,數控系統行業因此與這些工業行業息息相關。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1


