完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 激光雷達
激光雷達最大的優點在于它能直接提供距離信息。平常我們看到的照片或者視頻是一個平面,這是XY二維空間,但是駕駛員最關心是距離,即Z坐標,這就屬于三維。
文章:3715個 瀏覽:190433次 帖子:82個
作者提出了一種模塊化網絡架構,用于融合激光雷達、相機和雷達,以實現精確、穩健和遠距離的3D物體檢測。
LIO-SAM 提出了一個利用GT-SAM的緊耦合激光雷達慣導里程計的框架。實現了高精度、實時的移動機器人的軌跡估計和建圖。
在視覺圖像解釋中,ND-8和ND-16被選為顏色更好的點云。如果圖3所示的結果按從最詳細到最不詳細的順序排列,分類如下:ND-8、ND-16、ND-4和...
運動結構(SfM)在缺乏合適的視覺特征的環境中往往無法估計出正確的位姿。在這種情況下,最終的三維網格質量(取決于估計的準確性)會降低。
3D傳感技術主流包括結構光技術(Structure Light)和光飛行時間測量技術(ToF, Time of Flight), 后者又分為間接飛行時間...
Voxel-MAE證明了對大規模點云進行基于掩碼的自監督預訓練學習,來提高無人車的感知性能是可行的。KITTI、nuScenes、Waymo數據集上,S...
在目前可用于實現長波紅外輸出的非線性晶體中,ZGP、CdSe、GaSe等晶體發展時間長、研究較為成熟,BGSe、LGS、OP-GaAs、OP-GaP等晶...
要實現大范圍空間感知,激光雷達光源必須能夠對大視場(FoV)進行掃描。然后,通過測量每個方向的飛行時間,逐點檢測場景中的對象,以構建光學回波圖。調幅連續...
基于SiTime先進MEMS技術的新型汽車振蕩器SiT9396/7簡介
隨著汽車安全系統集成越來越多的傳感器和攝像頭,它們生成的海量數據對于安全、自主運行至關重要。
R3LIVE++ 由實時運行的 LiDAR 慣性里程計 (LIO) 和視覺慣性里程計 (VIO) 組成。LIO 子系統利用來自 LiDAR 的測量來重建...
激光雷達是以發射激光束探測目標的位置、速度等特征量的雷達。通過向目標發射探測信號(激光),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比...
輪速計就是安裝在電機上的編碼器,通過電機旋轉的圈數來計算機器人所走過的距離與角度,在ROS中稱為Odometry,譯為里程計.
UrbanScene3D大型數據集平臺用于研究城市場景感知和重建
本次導讀論文提出了一個用于研究城市場景感知和重建的大型數據平臺UrbanScene3D。該數據集包含超過12.8萬張高分辨率圖像,涵蓋16個場景,包括總...
自動駕駛汽車的魯棒環境感知是一項巨大的挑戰,這使得多傳感器配置與例如相機、激光雷達和雷達至關重要。在理解傳感器數據的過程中,3D 語義分割起著重要的作用...
(1) LT-SLAM, 在LT-SLAM模塊中,Kim團隊利用multi-session SLAM,基于激光雷達的global localizer...
2022-10-09 標簽:激光雷達 1852 0
LINS是以濾波為主的IMU、激光雷達緊耦合的激光SLAM算法。該算法的主要創新點就是用以 IESKF(即迭代誤差卡爾曼)為框架,融合 IMU 與激光雷...
2022-10-09 標簽:激光雷達 3309 0
激光二極管是通過一塊玻璃來傳輸數字脈沖信號的。該信號也會反射到D2光電二極管上。該信號的處理提供了傳輸時間及系統中內置的電子延遲。
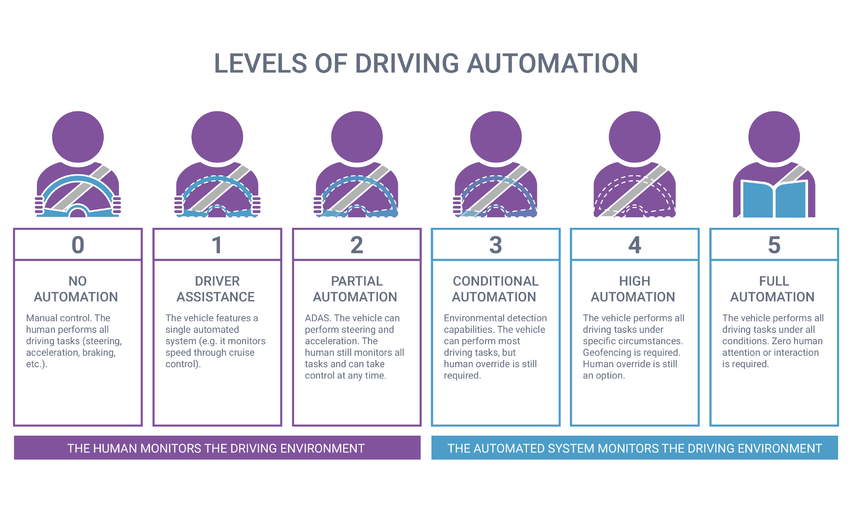
自動駕駛汽車是一種能夠感知環境并在無人參與的情況下運行的車輛,它能做有經驗的人類駕駛員所做的一切。在最近的一項研究中,專家們確定了自動駕駛汽車的三種發展...
社會經濟的快速發展離不開電網規模的迅速擴大。大規模復雜的輸電線路需要更多的人力、物力進行巡檢,由于分布存在差異,輸電線路的缺陷隱患也各不相同。
國內外激光雷達廠商通常選擇自建產線、外協代工、合作工廠三種方式生產激光雷達,而國內企業加快提高產能,擴產進程領先。
2022-09-23 標簽:激光雷達 1476 0
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1