完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 激光雷達
激光雷達最大的優點在于它能直接提供距離信息。平常我們看到的照片或者視頻是一個平面,這是XY二維空間,但是駕駛員最關心是距離,即Z坐標,這就屬于三維。
文章:3884個 瀏覽:192229次 帖子:82個
式中,L、R和D分別代表左視圖、右視圖和對應的絕對差值圖的亮度值。絕對差值圖并不是嚴格意義上的視差圖,但是它的計算方法最為簡單,速度快,它給出的結果可以作為參考
MEMS微鏡在DLP的應用是一個成功的例子。DLP顯示的核心技術則是采用靜電原理的MEMS微鏡組成的陣列,每一面微鏡構成一個單色像素,由微鏡下層的寄存器...
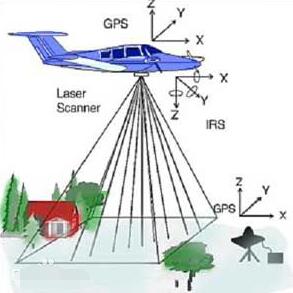
本文首先介紹了激光雷達的概念、構成原理及特點,其次介紹了毫米波雷達的概念與特點,最后分析了激光雷達和毫米波雷達兩者之間的區別。
“雷達”是一種利用電磁波探測目標位置的電子設備.電磁波其功能包括搜索目標和發現目標;測量其距離,速度,角位置等運動參數;測量目標反射率,散射截面和形狀等...
隨著自動駕駛的火熱,激光雷達受到前所未有的追捧,因為其具有高精度、大信息量、不受可見光干擾的優勢。但我們可以注意到,目前主流的自動駕駛方案并未完全拋棄毫...
什么是激光雷達?激光雷達可以為人類生活帶來哪些影響?【科普篇】
激光雷達相比傳統雷達,以精確的時間分辨率、精準的空間分辨率、超遠的探測距離等特點成為了先進的主動遙感工具。
2017-09-27 標簽:激光雷達 3.3萬 0
許多LiDAR光源是基于激光二極管,也有非制冷光纖激光器,較激光二極管有諸多的優勢,如擁有高功率光束分裂和使用光纖路由到多個傳感器位置的能力。
2017-10-13 標簽:激光雷達 3.1萬 0
激光雷達被認為是各行各業的關鍵傳感技術,在機器人、無人駕駛、智慧城市等領域充當著推動者的角色。而近年來一直被寄予厚望的固態激光雷達成為業內關注的熱點。
下面我們來說說激光器的種類,目前常見的激光器按工作介質分氣體激光器、固體激光器、半導體激光器、光纖激光器和染料激光器5大類,近來還發展了自由電子激光器。...
激光飛行時間法(TOF),通過將光脈沖在目標與雷達間的飛行時間乘以光速除以二,就可以獲得距離,該方案成熟度比較高,適用于長距離探測,絕大部分車載激光雷達...
對于激光雷達,為了完全取消機械結構,考慮通過調節發射陣列中每個發射單元的相位差來改變激光的出射角度,采用相控陣原理實現固態激光雷達。
感知、決策、執行是自動駕駛的三個層面,激光雷達更是在里面起到非常重要的作用。對于激光雷達怎么使用,怎么讓激光雷達發揮更好的作用更是顯得非常重要。 激光雷...
2018-05-15 標簽:激光雷達 2.1萬 0
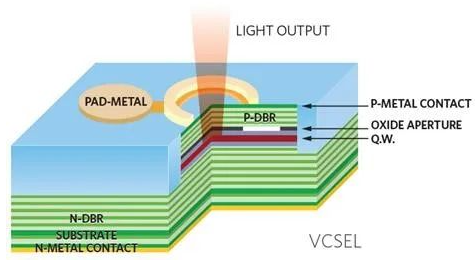
VCSEL是一種半導體器件,其激光垂直于頂面射出,與一般切開式獨立芯片工藝,激光由邊緣射出的邊射型激光不同。

汽車域控制器是一種新型的汽車電子控制器,將汽車電子各部分功能劃分成幾個領域,如動力傳動域、車身電子域、輔助駕駛域等等,然后利用處理能力強大的多核CPU/...
功能的本質意思是把“導航”和“輔助駕駛”結合。在原來L2輔助駕駛的基礎上(如車道線保持、自動跟車),加上車機的導航信息(如地圖軟件)進行自動變道,實現從...
最近Velodyne挑起的激光雷達LiDAR專利之戰成為了業界熱點。可以說在嚴苛的自動駕駛系統中激光雷達成為一種不可替代的傳感器。今天讓我們詳細聊聊激光...
新勢力造車在近兩年得到飛速發展,國內的蔚來、理想、小鵬等都在資本市場上融到了大量的資金,早期的新勢力汽車是從新能源電動車入手,因為自動駕駛門檻較高,但是...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1