完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > pso
PSO是粒子群優化算法(Particle Swarm Optimization)的英文縮寫,是一種基于種群的隨機優化技術,由Eberhart和Kennedy于1995年提出。粒子群算法模仿昆蟲、獸群、鳥群和魚群等的群集行為,這些群體按照一種合作的方式尋找食物,群體中的每個成員通過學習它自身的經驗和其他成員的經驗來不斷改變其搜索模式。
文章:22個 瀏覽:13128次 帖子:1個
很多激光器只能基于內部時鐘信號觸發脈沖輸出。這類激光器不能通過一個外部信號(比如Aerotech的位置同步輸出PSO功能)異步觸發。針對這類激光器的一種...

運動控制器PSO位置同步輸出(一):硬件平臺與PSO指令簡介
ZMC406和ZMC460N這兩款控制器同屬高系列,功能強大,能滿足多種場合的需求,支持直線插補、連續插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、...

本節我們主要去講解一下多種PSO模式原理和使用的講解,用戶可根據實際需求靈活選擇觸發模式。
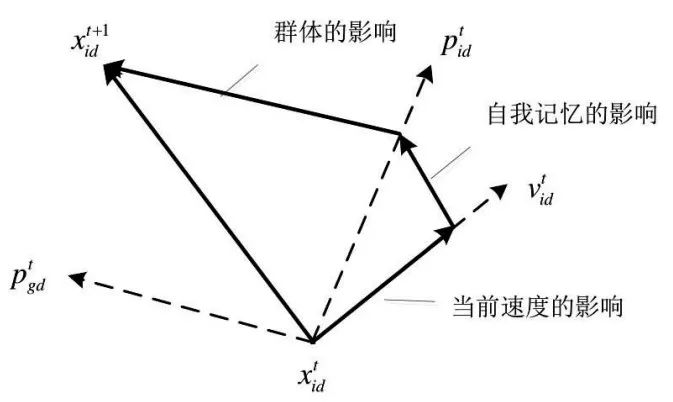
粒子群算法(Particle Swarm Optimization,PSO)屬于進化算法的一種,和模擬退火算法相似,它也是從隨機解出發,通過迭代尋找最優解。
在本例中設計了一個傾斜表面浮雕光柵(SRG, Slanted Surface Relief Grating) 將光耦合到單色增強現實(AR)系統的波導中。
講解矢量比較兩種模式:等距周期比較輸出與固定時間周期比較輸出
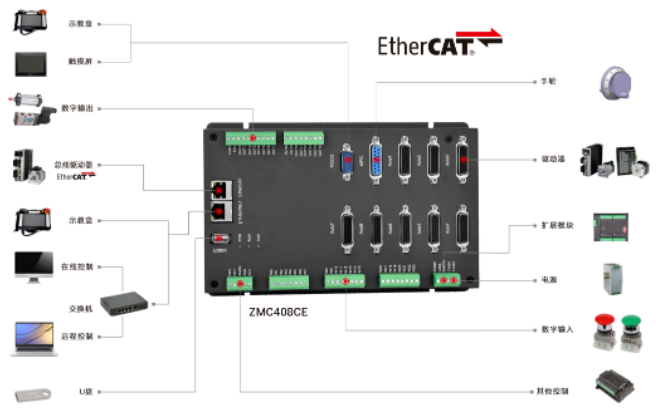
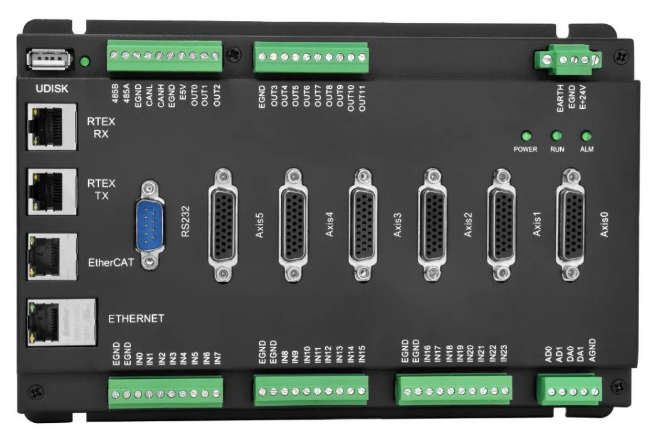
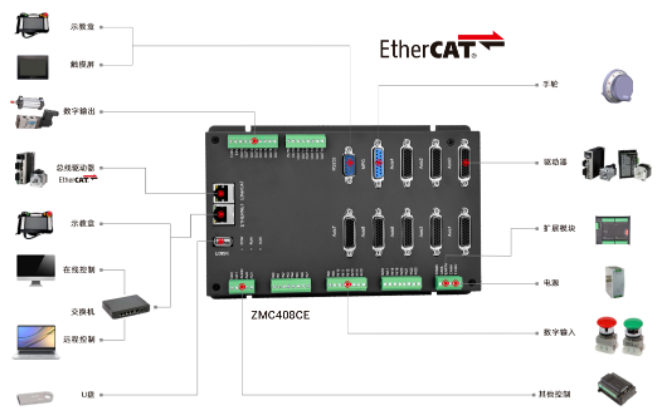
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,...
本質上講,要驗證一個程序的正確性,需要驗證程序中所有執行都正確。對并發程序來說,由于線程之間的交織,不同線程中程序指令的執行順序有很多種情況,導致并發程...
硬件選型的首要要求是支持PSO功能,再分析PSO的應用場合和軸數等選擇具體的型號。本例以ZMC460N雙總線運動控制器為例展開介紹。 PSO功能用于控...
MotionRT7是深圳市正運動技術推出的跨平臺運動控制實時內核,也是國內首家完全自主自研,自主可控的Windows運動控制實時軟核。
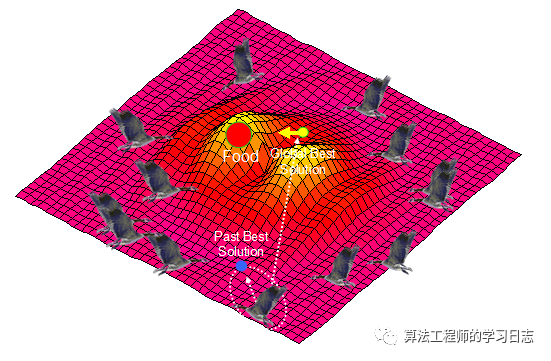
粒子群算法是一種智能優化算法。關于智能,個人理解,不過是在枚舉法的基礎上加上了一定的尋優機制。

粒子群算法經常與其他算法混合使用。混合策略就是將其他進化算法、傳統優化算法或其他技術應用到PSO中,用于提高粒子多樣性、增強粒子的全局探索能力,或者提高...
運動控制器PSO視覺飛拍與精準輸出的C++開發(二):多軸PSO等距/周期輸出
本文主要介紹正運動技術EtherCAT控制器在VS平臺采用C++語言實現的各種PSO功能。正運動提供多種PSO模式供用戶搭配不同的場景使用。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1