完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實用的電子技術(shù)文章,是您了解電子技術(shù)動態(tài)的最佳平臺。
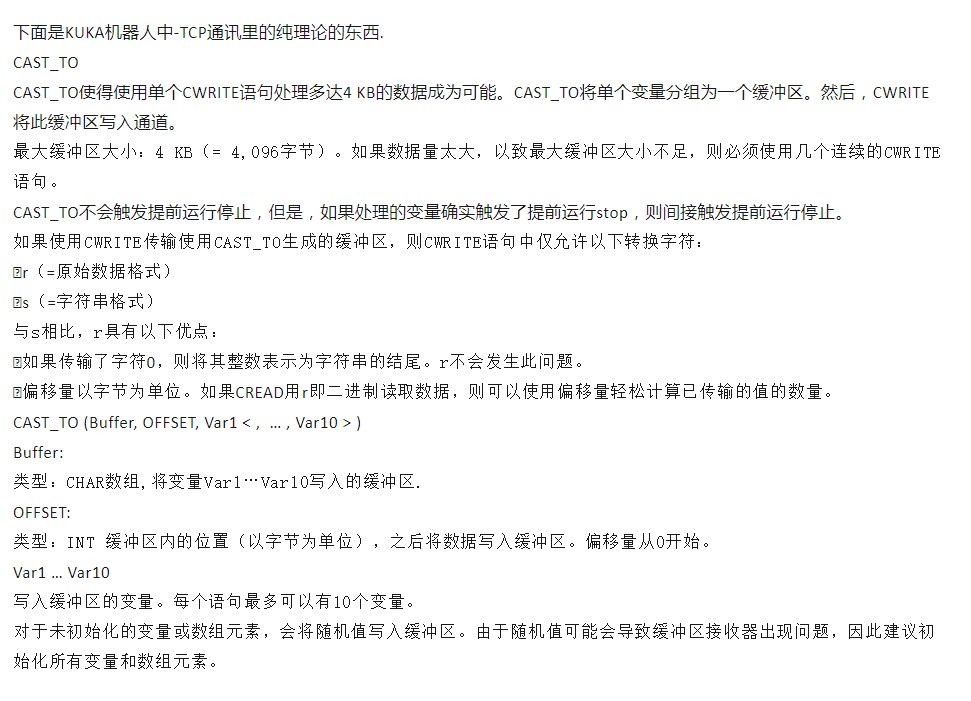
CAST_TO使得使用單個CWRITE語句處理多達(dá)4 KB的數(shù)據(jù)成為可能。CAST_TO將單個變量分組為一個緩沖區(qū)。然后,CWRITE將此緩沖區(qū)寫入通道。...
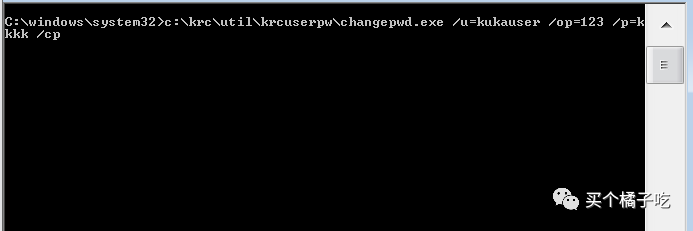
在使用workvisual對程序進(jìn)行更改時提示需要輸入用戶名與密碼,此時一頭霧水,機(jī)器人工程師也蒙圈,在查找資料后kuka的默認(rèn)...
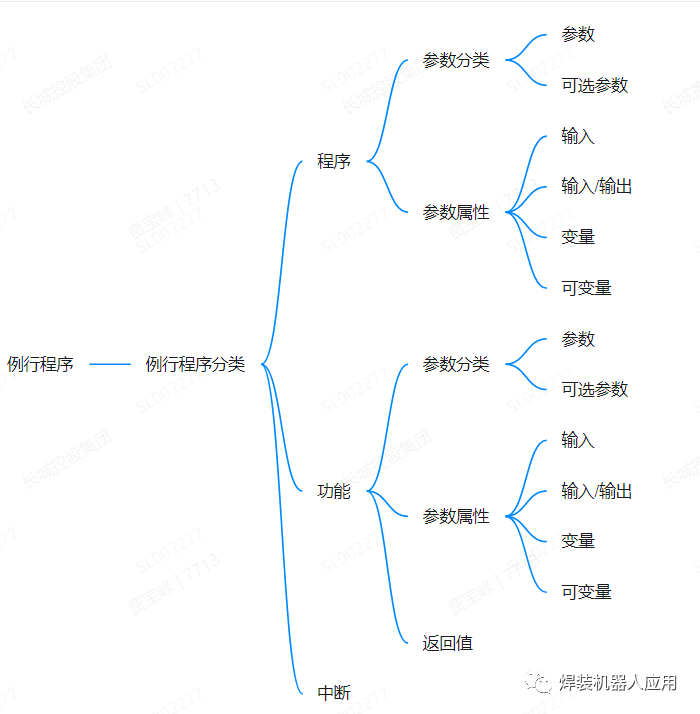
ABB機(jī)器人的例行程序可以分為三種類型;程序、功能、中斷,本章主要分享一下程序和功能的用法。...
關(guān)于工業(yè)機(jī)器人的分類,國際上沒有指定統(tǒng)一的標(biāo)準(zhǔn),可按負(fù)載重量、控制方式、自由度、結(jié)構(gòu)、應(yīng)用領(lǐng)域等劃分。...
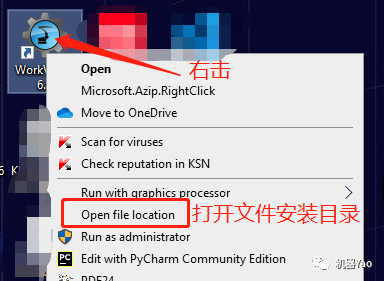
打開機(jī)器人D盤,打開文件夾workvisual,選擇里面的壓縮包,點擊右下角編輯/復(fù)制,插入U盤,打開U盤,點擊右下角編輯/添加,等待下方讀條結(jié)束,拔出U盤,解壓安裝在電腦中即可。...
打開WorkVisual,進(jìn)入編程與診斷,連接機(jī)器人,讀取程序;...
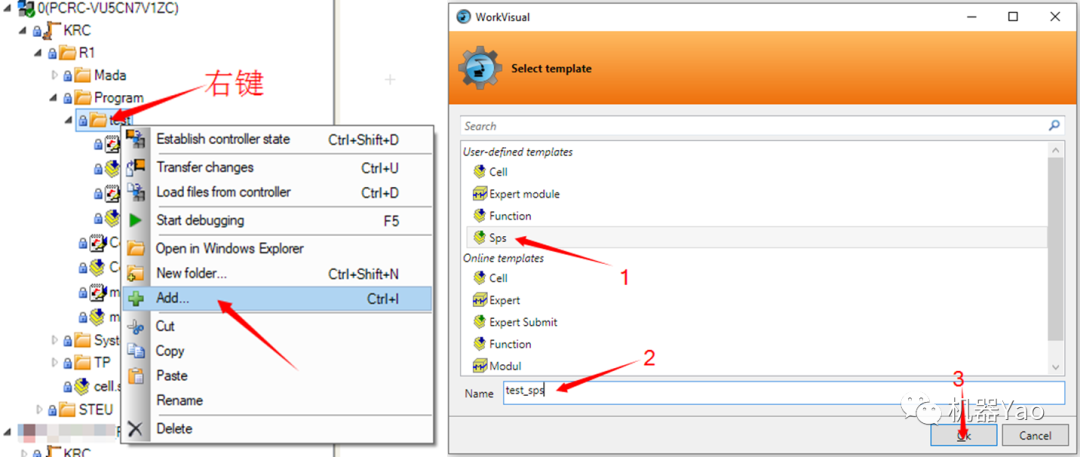
打開WorkVisual,進(jìn)入編程與診斷,連接機(jī)器人,讀取程序;...
在很多人眼里,主控板有著密密麻麻的芯片引腳與PCB走線,看起來非常難的樣子。其實恰恰相反,主控板的設(shè)計有著其特有的設(shè)計規(guī)律,其實說白了就像搭積木...
那我們配置對應(yīng)信號的前提是要配置IO版。本篇文章就是基于已經(jīng)配置好了DSQC652的信號板情況下的一個IO設(shè)置。...

根據(jù)編程的是PTP還是PTP樣條運(yùn)動(SPTP),近似參數(shù)CPTP具有不同的效果。...
機(jī)器人用戶在應(yīng)用中的誤區(qū)排在第一位的是低估了有效負(fù)荷和慣性需求。通常大多是因為在計算負(fù)荷時沒有包括機(jī)械臂末端所裝工具的重量造成的。...

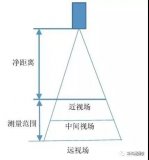
3D視覺技術(shù)作為新興的技術(shù)領(lǐng)域還存在很多亟待解決的問題,但2D視覺已不能滿足空間抓取的應(yīng)用要求。與2D視覺相比,3D視覺技術(shù)的優(yōu)點有哪些?...
基于區(qū)域控制的方法首先需要將環(huán)境劃分為不相交區(qū)域,然后通過區(qū)域的分配靜態(tài)或動態(tài)地進(jìn)行運(yùn)動協(xié)同。但是,這種基于區(qū)域控制的方法對于變尺寸機(jī)器人不夠精確,降低系統(tǒng)效率。...

在編程操作過程中,為了確定機(jī)器人的空間位置以及姿態(tài)的變化,需要建立合適的工具和用戶坐標(biāo)系。工具坐標(biāo)系用于確定每個工具中心點(TCP)的位置和工具姿勢。...

首先是運(yùn)動控制器產(chǎn)品的復(fù)雜性。運(yùn)動控制器可以分為PLC、專用控制器和PC-based運(yùn)動控制器,PC-based運(yùn)動控制器內(nèi)部還分成三大細(xì)分種類。...
一般都會定義機(jī)器人第一軸的旋轉(zhuǎn)軸為基坐標(biāo)系Z軸,旋轉(zhuǎn)中心即是坐標(biāo)系原點,X和Y的方向是的電機(jī)零點確定,所以只要你不更換電機(jī)的零點和機(jī)械結(jié)構(gòu),單個機(jī)器人里這個基坐標(biāo)系是永遠(yuǎn)不會變的!...


點焊任務(wù)應(yīng)在車輛坐標(biāo)系(Base)中編程。 對于WPS機(jī)器人,電極與帶有新E形帽的金屬板之間的距離必須為3 mm,入射角必須為90度。SZ在關(guān)閉時不得滑動,在焊接時不得引起分流。...

與電磁導(dǎo)航相類似的是基于磁條的AGV導(dǎo)航技術(shù)。不同之處在于,后者的磁條是鋪在地面上而不是埋在地下。基于磁條的AGV導(dǎo)航的優(yōu)點是AGV定位準(zhǔn)確,路徑的鋪設(shè)、改變或擴(kuò)展比電磁導(dǎo)航更容易,并且磁條的成本更低。...
如果處理中斷例程的時間短于主程序中制定的軌跡規(guī)劃,則機(jī)器人可不中斷而繼續(xù)運(yùn)行。如果中斷例程所需的時間長于規(guī)劃的軌跡,則機(jī)器人在其軌跡規(guī)劃的終點停下,中斷例程一執(zhí)行完畢,它將繼續(xù)運(yùn)行。...

關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




