完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動(dòng)態(tài)的最佳平臺(tái)。
機(jī)器視覺行業(yè)產(chǎn)業(yè)鏈環(huán)節(jié)較長,上游由機(jī)器視覺系統(tǒng)硬件和軟件算法構(gòu)成,中游為設(shè)備商和系統(tǒng)集成商主要負(fù)責(zé)軟件的二次開發(fā)和設(shè)備制造,下游應(yīng)用場景和行業(yè)廣泛。...

從 S7-200 SMART V2.5 版本開始,S7-200 SMART 開始支持做 PROFINET IO 通信的智能設(shè)備。從而,兩個(gè) S7-200 SMART 之間可以進(jìn)行 PROFINET IO 通信,一個(gè)CPU 作PROFINET IO 控制器,一個(gè) CPU 作 PROFINET 通信的設(shè)...

相較于傳統(tǒng)PLC可能需要擴(kuò)展【以太網(wǎng)/RS845通信模塊】【模擬量模塊】【定位模擬】等等眾多模塊組合才能達(dá)成需求。M-PLC更簡化設(shè)備、節(jié)省空間、提高可靠性。...

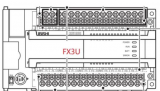
PLC主要由CPU、存儲(chǔ)器、輸入/輸出模塊和通信模塊等組成。其中CPU負(fù)責(zé)處理程序邏輯,存儲(chǔ)器用于存儲(chǔ)程序和數(shù)據(jù),輸入/輸出模塊用于與外部設(shè)備進(jìn)行交互,通信模塊用于與其他設(shè)備進(jìn)行通訊。...

交流伺服電機(jī)的價(jià)格相對較高,對于一些預(yù)算有限的應(yīng)用來說可能不太適合。另外,交流伺服電機(jī)在低速和低負(fù)載情況下的效率較低,不如直流伺服電機(jī)表現(xiàn)出色。...
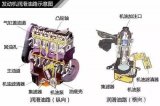
要保證汽車發(fā)動(dòng)機(jī)的正常運(yùn)作,肯定不能缺少潤滑系和冷卻系,要知道,汽缸內(nèi)的氣體溫度可高達(dá)2500K。與高溫氣體接觸的零件會(huì)因高溫導(dǎo)致零件強(qiáng)度下降,壽命縮短,也可能出現(xiàn)破壞正常配合間隙等等狀況。...
PLC中模擬量一般指0到10Vdc的電壓以及0(4)到20ma的電流信號(hào),通過模擬量輸出模塊(DA)和輸入模塊(AD)進(jìn)行處理,數(shù)字量值的是開關(guān)量,比如我們的一些按鈕、接近開關(guān)等,按照開關(guān)頻率有普通和高速之分。...
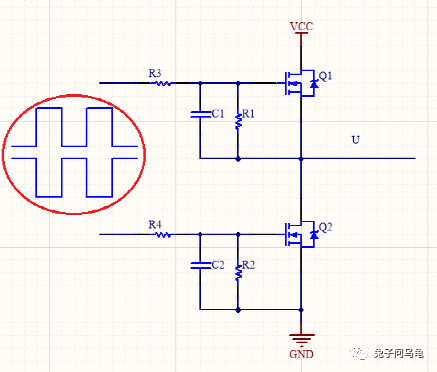
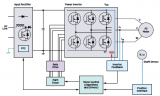
Q1和Q2兩MOS管組成了一個(gè)橋臂,兩個(gè)管子不能同時(shí)導(dǎo)通。...
為了實(shí)現(xiàn)某些特殊的控制功能,一些執(zhí)行機(jī)構(gòu)上還配備了其他的控制部件,如實(shí)現(xiàn)連鎖功能的電磁閥,實(shí)現(xiàn)保位功能的鎖氣器,加快動(dòng)作速度的氣放大器,失氣時(shí)維持短時(shí)間的儲(chǔ)能罐等等。...
在討論控制系統(tǒng)的時(shí)候,I/O點(diǎn)是最經(jīng)常聽到的一個(gè)術(shù)語。它是指輸入/輸出點(diǎn),I代表INPUT,指輸入,O代表OUTPUT,指輸出。輸入/輸出都是針對控制系統(tǒng)而言,輸入指從儀表進(jìn)入控制系統(tǒng)的測量參數(shù),輸出指從控制系統(tǒng)輸出到執(zhí)行機(jī)構(gòu)的參量,一個(gè)參量叫做一個(gè)點(diǎn)。...
機(jī)器視覺系統(tǒng)的定位精度如何計(jì)算? 假如是30萬像素的攝像機(jī),監(jiān)控的面積為640x480mm,其精度是不是就是1mm了? 30W相機(jī)分辨率640*480 正常這樣算:用最長的邊除去監(jiān)控面積最長的邊 即可,所以精度基本上是1mm,這個(gè)是理論值,如果你做測量或者表面劃傷檢測,肯定不準(zhǔn)確,一個(gè)像素有可能無法...

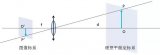
單目相機(jī)標(biāo)定技術(shù)適用于被測表面曲率較小且需要獲取實(shí)際數(shù)據(jù)的應(yīng)用場合,比如食品、機(jī)械制造以及半導(dǎo)體等。...
無刷電機(jī)屬于自換流型(自我方向轉(zhuǎn)換),因此控制起來更加復(fù)雜。...
該參數(shù)表示參與擬合直線的有效點(diǎn)數(shù)量占總測量路徑數(shù)量的百分比。由于邊緣殘缺或部分邊緣點(diǎn)被剔除等情況,使得參與擬合直線的邊緣點(diǎn)數(shù)目減少,但不能低于該參數(shù)值,否則測量失敗。下圖中,有效點(diǎn)比例VPP:0.8929...

AMR傳感器對磁場方向變化很敏感,而霍爾技術(shù)對磁場強(qiáng)度很敏感。所以傳感器對系統(tǒng)中的氣隙和機(jī)械公差變化具有很強(qiáng)的容忍度,這一點(diǎn)很有優(yōu)勢。此外,AMR傳感器的工作磁場沒有上限,因此,這種傳感器在高磁場下工作時(shí)幾乎不受雜散磁場的影響。...
數(shù)據(jù)塊用于存儲(chǔ)用戶數(shù)據(jù)及程序中間變量。新建數(shù)據(jù)塊時(shí),默認(rèn)狀態(tài)是優(yōu)化的存儲(chǔ)方式,且數(shù)據(jù)塊中存儲(chǔ)的變量是非保持的。...

溫度是描述電機(jī)軸承運(yùn)行狀態(tài)的一個(gè)基本參數(shù)。對于投入使用的電機(jī)軸承溫度的監(jiān)控已經(jīng)成了很多電機(jī)的標(biāo)配。...
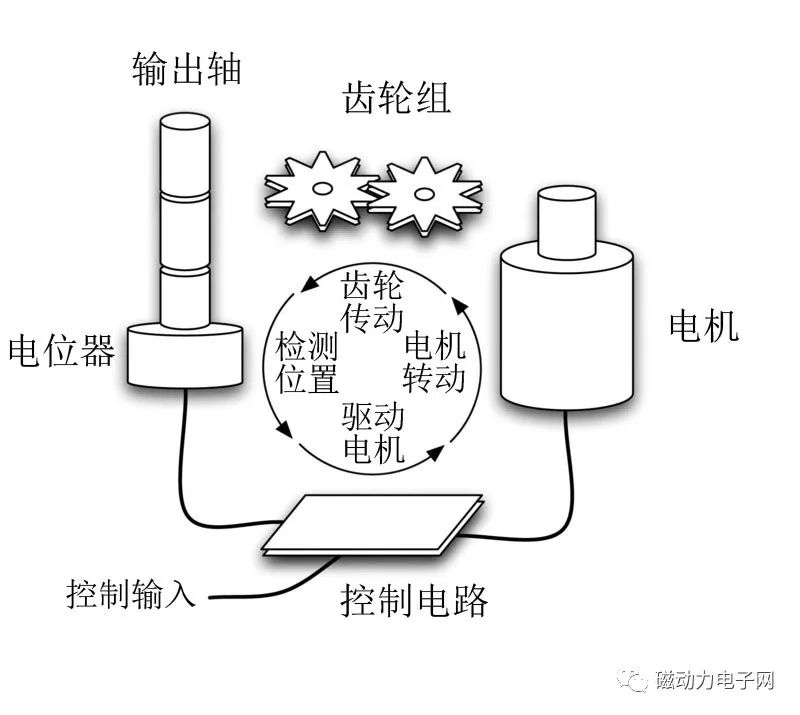
舵機(jī)(英文Servo)最早出現(xiàn)于航模運(yùn)動(dòng),它是遙控模型用于控制動(dòng)作的動(dòng)力源,玩過遙控模型的朋友都知道舵機(jī)長什么模樣,為了適用于各種模型的需求,舵機(jī)發(fā)展出各種類型和大小的型號(hào)。...
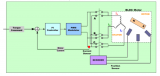
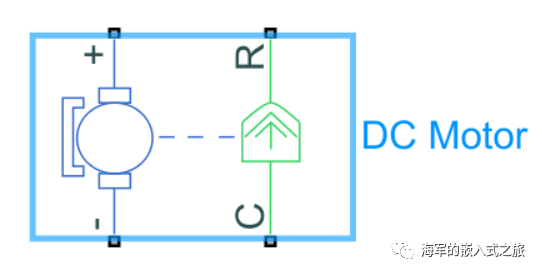
該塊假設(shè)沒有電磁能量損失,因此,反電動(dòng)勢和轉(zhuǎn)矩常數(shù)具有相同的數(shù)值。電機(jī)參數(shù)可以直接指定,也可以從空載速度和失速轉(zhuǎn)矩中得出。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1




